蔬菜穴盘苗自动补苗试验台穴孔定位与缺苗检测系统
2018-07-19 16:13王永维肖玺泽梁喜凤武传宇徐健康
农业工程学报 2018年12期
王永维,肖玺泽,梁喜凤,王 俊,武传宇,徐健康
(1.浙江大学生物系统工程与食品科学学院,杭州310058;2.中国计量大学机电工程学院,杭州310018;3.浙江理工大学机械与自动控制学院,杭州310018;4.永康市质量技术监督检测中心,永康321300)
0 引 言
中国是世界最大的蔬菜生产国,2015年全国蔬菜播种面积2 200万hm2[1],占世界蔬菜播种总面积的43%[2]。蔬菜种植方式主要有直接播种、育苗移栽,由于育苗移栽具有气候补偿、提早成熟和增加产量等综合效益[3-7],全球大约60%蔬菜品种采用育苗移栽进行种植[8-9],因此移栽是蔬菜种植的重要环节。蔬菜移栽机是实现蔬菜机械化种植的重要机具,按其自动化程度可分为半自动和全自动2种。半自动移栽机受人工取苗、投苗速度限制,单行移栽频率一般小于40株/min,作业效率低[10];全自动移栽机的取苗、投苗、开穴、栽苗、覆土等工序自动完成,作业效率高,因此国内外研究人员普遍认为作物移栽机械化向全自动移栽方向发展[11]。为了保证全自动移栽机作业质量,需要为其提供无空穴、高质量的穴盘苗。但当前国家标准对蔬菜种子发芽率要求大于85%[12],同时受播种机性能、育苗环境等影响,穴盘苗的空穴率将超过15%,大量的空穴严重影响全自动移栽机的作业效果。因此,在育苗阶段对穴盘空穴补入同龄钵苗是提高全自动移栽机作业质量的有效途径之一。
为了解决由于穴盘苗空穴造成的移栽缺苗问题,国内外学者在穴盘苗缺苗识别、补苗方面进行了探索。在幼苗图像获取方法方面,Onyango等[13]研究了一种结合颜色和作物的行列特征提高分割成功率的分割算法,作物识别成功率最高为96%,最低为82%;陈晓光等[14]利用图像处理技术提取蔬菜苗茎叶面积的大小和叶子的数量等特征参数,准确识别出蔬菜苗轮廓线及苗的位置坐标等特征量;任烨等[15-16]研究了基于机器视觉技术的番茄幼苗的识别和位置检测,对于50孔穴盘番茄幼苗识别准确率为98.7%,对于72孔穴盘幼苗识别准确率为98.14%。在育苗期稀植、补苗方面,Tai等[17]开发了机器视觉辅助的机器人移栽机,对高密度苗移植至低密度穴盘进行空穴检测,准确率达95%;Ryu等[18]设计了具有机器视觉装置的苗床移栽机,用于子叶期苗龄为13 d的黄瓜苗和苗龄26 d番茄苗的穴盘苗空穴检测移植,识别成功率均高于95%;Albertus等[19]发明了自动移钵机,通过视觉识别系统为补苗和移栽提供信息;郁玉峰[20]设计了三维平移并联移栽机器人,其机器视觉系统能够识别穴盘中的绿色植物秧苗并获得秧苗中心坐标;胡飞等[21]设计了一套机器视觉系统,用于实时测量各穴孔中幼苗叶片面积、判断是否适合移栽作业、确定适合移栽幼苗的抓取位置;贺磊盈等[22]基于贪心遗传算法对穴盘空穴补苗时的补栽路径规划进行了研究;童俊华等[23-25]针对温室内钵苗稀植移栽利用贪心遗传算法、遗传算法进行了优化穴盘苗移栽路径研究。在成苗移栽过程补苗方面,刘姣娣等[26]开发了自动补苗装置并通过PID控制实现了大田移栽时缺苗的补苗;金鑫[27]开发的自动识别取苗系统通过对幼苗茎杆进行识别,通过光电传感器获取穴格苗的信息并判断穴盘穴格有无苗;吴俭敏等[28]设计了穴盘钵苗自动识别及控制装置可使移栽机漏栽率降低12%。上述通过图像处理进行幼苗识别、空穴检测的研究成果,幼苗识别准确率在82%~98%,仍不能实现幼苗100%准确识别,且随着苗龄增加叶片出现重叠时幼苗识别成功率降低,而成苗移栽定植时通过增加补苗装置减少漏栽又增加了自动移栽机的复杂性。因此,在育苗早期幼苗叶片多集中在穴孔区域,幼苗识别成功率高,是进行穴盘缺苗检测、补苗的最佳时期;为了提高缺苗检测的准确性,缺苗的检测方法也有待进一步研究。另外,现有研究成果是通过图像处理获得的幼苗位置或秧苗中心坐标,未进行穴孔边界信息获取研究,以幼苗位置或秧苗中心确定的取苗中心一般与穴孔中心不一致,但育苗早期补苗要求将备用同龄穴盘苗的基质与幼苗整体取出以避免损伤幼苗[1],如果以幼苗位置或中心坐标作为补苗时取苗中心点,取苗机构与穴盘的穴格将产生干涉,甚至难以取出钵苗;未获取待补苗穴盘空穴的边界信息,不能为补苗机械手取出待补苗穴孔中的无苗基质、补入同龄穴盘苗提供精确的穴孔位置,补苗难以自动完成。因此,通过图像处理准确确定穴盘苗的幼苗图像信息、穴孔边界并进行缺苗检测是自动补苗的基础。
为了进一步提高穴盘苗识别的成功率、穴孔空穴的检测成功率并同步获得其穴孔边界,该文研制了蔬菜穴盘苗缺苗检测与自动补苗试验台,将仅对其幼苗识别、缺苗检测性能和穴孔定位技术进行试验研究,为蔬菜穴盘苗自动补苗提供穴盘苗信息和精确的穴孔边界信息。
1 蔬菜穴盘苗自动补苗试验台
1.1 硬件组成
蔬菜穴盘苗自动补苗试验台由缺苗检测系统、补苗系统组成,如图1所示。
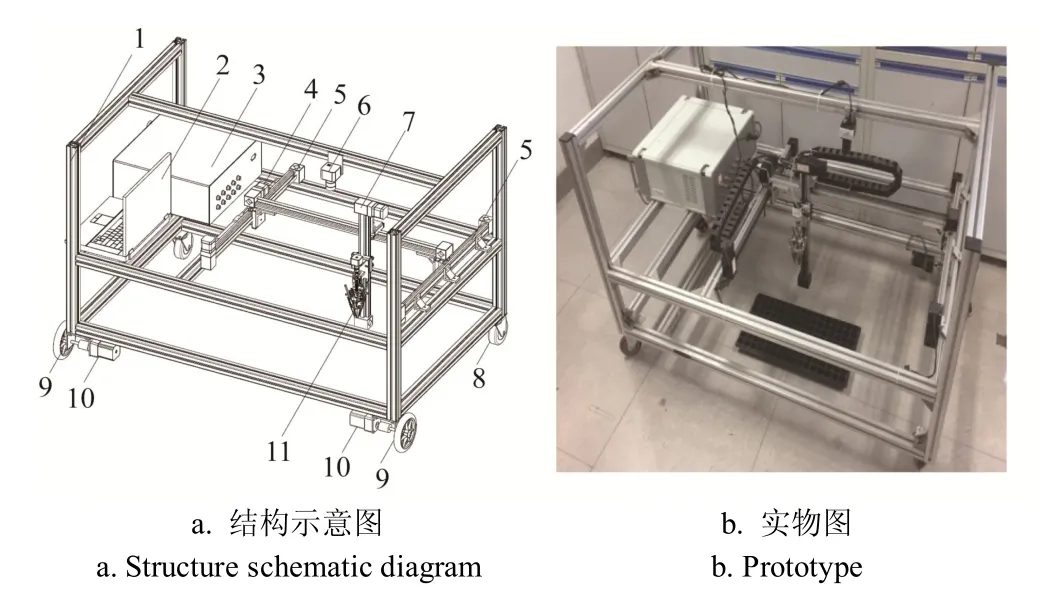
图1 蔬菜穴盘苗自动补苗试验台Fig.1 Test-bed of automatic seedling supplementing for vegetable plug seedlings
缺苗检测系统由工业相机、计算机、控制器组成,工业相机安装在机架中央上方,为JHSM300E型CMOS工业相机,300万有效像素,具有AN006外触发接口,配合相应的CameraApp程序能够实现图像采集。工业相机触发拍照由计算机通过发送命令给控制器的单片机来实现。补苗系统由横向滑台、纵向滑台、垂直滑台、补苗末端执行器组成,控制器接收计算机信号控制补苗系统各部件工作,使补苗末端执行器到达指定预定穴盘穴孔位置并由穴孔取出无苗基质或备用同龄钵体苗,或将已取出的备用同龄钵体苗补入等补苗的目标穴孔[29-30]。
1.2 缺苗检测软件设计
MATLAB软件具有十分丰富的图形控件,能够解决图像识别的常见应用问题[31-32]。缺苗检测图像处理程序在MATLAB环境下编写,使用的MATLAB 7.0图像处理工具箱(image processing toolbox)提供的函数有imread,graythresh,imbw,imerode,imdilate,bwlabeln,regionprops,分别用于从指定文件读取图像、Otsu方法计算图像阈值、图像阈值分割、形态学腐蚀运算、形态学膨胀运算、标记单连通域、统计连通域的特征。利用上述函数对所采集的图像进行处理,提取出幼苗特征信息与穴盘框架信息,统计各孔穴中幼苗像素叶面积,计算缺苗孔穴的坐标位置。穴盘缺苗图像处理、分析流程见图2。

图2 穴盘缺苗图像处理与分析流程图Fig.2 Flowchart for image processing and analysis for seedling shortage in plug tray
1)利用imread函数读取由工业相机拍摄的原始RGB图像。RGB图像即彩色图像,是利用R、G、B3个分量标识1个像素的颜色,R、G、B分别代表红、绿、蓝3个颜色分量。读取彩色图像后按图像像素位置和颜色通道将图像数值化为n×m×3矩阵,表示为I(i,j,c),其中i为像素纵坐标,i=1,2,……n,n为像素数组的列数;j为像素横坐标,j=1,2,……m,m为像素数组的行数;c为R、G、B的颜色通道,c=1,2,3。
2)针对将要提取的幼苗或穴盘图像,对R、G、B颜色分量采用不同的线性变换实现灰度化处理,获得灰度图;
3)对幼苗灰度图进行阈值分割、去噪声处理(即对图形进行形态学腐蚀运算与膨胀运算,然后标记单连通域、统计连通域的特征,去除孤立的小面积区域),获得幼苗特征图像;对穴盘灰度图阈值分割后去除幼苗特征图像处理,再进行去噪处理,并根据穴盘表面图像在横纵方向连续区域与有穴孔区域像素值不同以及穴盘的规格化结构,获得穴孔边界与中心位置;
4)综合穴盘穴孔位置与幼苗特征图像,对穴孔内幼苗特征图像的像素进行统计,获得每一穴孔内幼苗的像素统计值;
5)设定不同苗龄时是否有苗的像素阈值,判断是否有苗,并记录无苗穴孔位置;然后判断剩余穴孔数N是否为0即是否检测完所有穴孔,依次判定每个穴孔是否有苗,直到检测完成所有穴孔。
2 穴盘苗幼苗、穴盘特征提取与缺苗判定
对蔬菜穴盘苗图像处理主要包括图像获取、图像增强、图像分割、特征提取等,通过对穴盘苗图像处理获得幼苗特征图像、穴孔边界信息,并依据穴孔边界内幼苗特征图像像素统计值进行空穴判定。
2.1 图像获取与数字化
因不同幼苗在育苗早期叶片多以绿色为主,且叶片基本分布在穴孔区域,故以实验室正在培养的拟南芥幼苗作为图像采集对象。拟南芥采用32孔标准穴盘育苗,穴盘规格为540 mm×280 mm,穴孔上口径为55 mm×55 mm。图像采集于2016年4月15日、25日进行,在自然光线条件下利用工业相机采集苗龄分别为25、35 d的拟南芥穴盘苗的彩色图像各6幅,因同龄幼苗形态差异较小,仅以典型的每种苗龄1幅彩色图像进行分析,如图3所示。
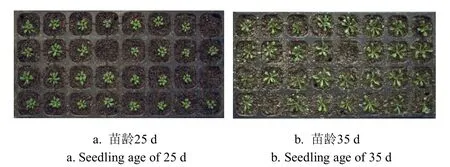
图3 不同苗龄拟南芥穴盘苗彩色图像Fig.3 Color image of Arabidopsis plug seedling with different seedling age
缺苗检测软件读取采集的穴盘苗彩色图像,并将彩色图像按图像像素坐标建立像素值的三维矩阵I(i,j,c),实现图像数字化。
2.2 幼苗特征图像提取
幼苗特征图像提取过程主要有灰度化处理、灰度阈值分割、噪声去除。因不同苗龄幼苗图像处理方法相同,仅以苗龄25 d的拟南芥幼苗图像为例进行分析。
2.2.1 灰度化处理
拟南芥穴盘苗彩色图像中,土壤基质、穴盘区域有较大R、B值,其G值小于幼苗区域的G值,为了区别绿色植物与非植物背景,对彩色图像利用特定灰度化因子放大G分量的影响,对图像进行灰度化处理,突出植物的绿色特征。对苗龄25 d的拟南芥穴盘苗彩色图像的矩阵I(i,j,c)中每一元素分别进行3I(i,j,2)-I(i,j,1)-I(i,j,3)、2I(i,j,2)-I(i,j,1)-I(i,j,3)变换处理,即采用灰度化因子3G(i,j)-R(i,j)-B(i,j)、2G(i,j)-R(i,j)-B(i,j)灰度化,得到超绿特征的灰度图像如图4所示。

图4 不同灰度因子下苗龄25 d拟南芥穴盘幼苗灰度图像Fig.4 Gray image of Arabidopsis plug seedlings with seedling age of 25 d under different grays cale factors
2.2.2 灰度阈值分割
灰度图像的阈值化分割算法是图像分割中应用最多的方法,灰度图像取单阈值分割后可以得到1幅二值图像。Otsu算法是图像分割中阈值选取的常用算法之一,能够把图像的灰度数按灰度级分成2个部分,使得2部分之间的灰度值差异最大,每部分之间的灰度差异最小,不受图像亮度和对比度影响[33]。因此,采用Otsu阈值分割算法函数,对所获得的穴盘苗灰度图进行阈值分割,结果如图5所示。
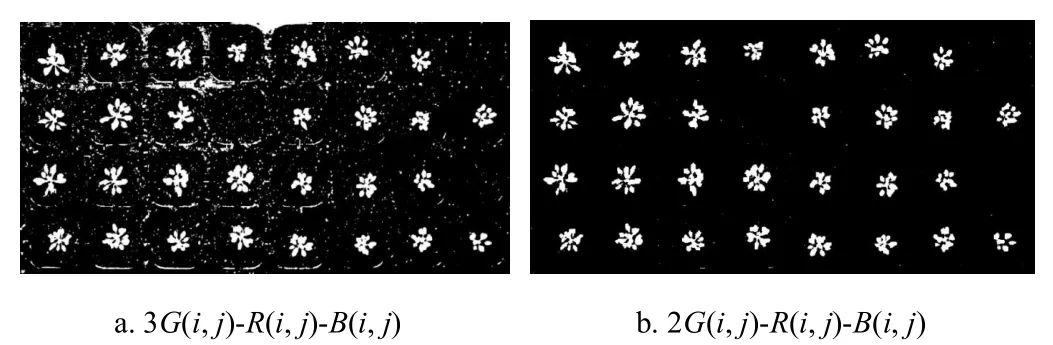
图5 不同灰度因子下苗龄25 d拟南芥穴盘幼苗二值图像Fig.5 Binary image of Arabidopsis plug seedling with seedling age of 25 d under different gray scale factors
由图5知,选取3G(i,j)-R(i,j)-B(i,j)灰度化因子的灰度图采用Otsu法阈值分割后,二值图像中包含除幼苗叶片外的其他像素点,穴盘正上方反光处被错误分类。而选取2G(i,j)-R(i,j)-B(i,j)因子灰度化再进行Otsu法阈值分割,可以消除幼苗以外区域的大部分其他图像点,分割效果较好,即选取该因子灰度化再利用Otsu阈值分割算法,在较宽范围光照条件下,能够满足捕捉幼苗“绿色”特征的要求。
2.2.3 噪声去除
通过阈值分割后的穴盘苗二值图像还包含噪声,对后续的处理造成干扰,甚至影响结果的正确率,因此去除噪声是图像二值化后的必要环节。在二值图像处理中,常用的噪声去除方法包括以腐蚀、膨胀为基础的开运算、闭运算。观察图5b二值图像可以看出,与幼苗区域相比,噪声多为分散的小面积单连通区域,故以像素点为单位计算所有的单连通区域面积,然后设定阈值,再将所有面积值小于此阈值的区域像素值置0,以去除此类噪声。经试验,采用‘disk’2×2型结构元素对所得的二值图像进行开运算,平滑幼苗区域边缘,再计算各单连通区域面积,设定面积阈值去除孤立的小面积噪声区域,能够达到较好的去除效果,结果如图6,基本完全消除了幼苗以外的其他图像信息。

图6 苗龄25 d拟南芥穴盘幼苗去噪后二值图像Fig.6 Binary images after de-noising of Arabidopsis plug seedlings with seedling age of 25 d
2.3 穴盘特征图像提取与穴格边界确定
2.3.1 穴盘特征图像提取
穴盘特征图像提取过程包括灰度化处理、阈值分割、去除幼苗图像、噪声去除,主要处理结果如图7所示。因穴盘苗图像的穴盘部分具有相同的灰度值,所以采用与幼苗图像处理同样的灰度阈值分割方法提取穴盘特征信息。选取适当的灰度阈值能够有效地分离穴盘灰度图像的土壤基质与穴盘,分割结果如图7a所示。

图7 穴盘二值图像Fig.7 Binary images of plug tray
由图7a知,灰度阈值分割后的穴盘二值图像仍有幼苗的图像信息,为了不影响后期穴盘与穴孔基质的准确区分、穴孔边界的精确确定,综合上述处理获得的幼苗特征图像,在图7a中去除图6所示幼苗区域的特征图像,结果如图7b所示。由图7b知,去除幼苗图像信息的穴盘二值图像基本显示出穴盘表面和大部分孔穴的边界,但由于穴盘表面部分区域存在基质,另外土壤基质的灰度值与穴盘灰度值有重叠部分,穴盘表面包含了大量表示基质的区域,穴孔边界仍模糊不清。观察图7b发现,二值图像中穴盘部分连续,而穴孔中基质具有该灰度值的区域多呈现分散的点状。为了消除这些点状区域对判断精度影响,采用腐蚀与面积阈值去除的方法,对图7b的图像进行去噪处理,得到较清晰的穴盘表面特征图像如图7c所示。
2.3.2 穴孔边界确定
由图7c图像结果已可以确定多数穴孔的位置,但存在部分穴孔边界不清楚问题,不能准确判定穴孔边界与中心位置,不能为补苗末端执行器提供精确的位置信息,故还需进一步精确确定穴孔的边界。因穴孔具有标准结构且在穴盘上呈方阵排列,穴孔间的穴盘表面部分的图像在横向、纵向呈连续条状,所以可以利用穴盘图像像素统计值随横坐标、纵坐标变化的规律确定穴孔边界。对图7c每一列、每一行分别统计像素值得到穴盘表面像素统计值与随行、列像素坐标的变化关系如图8所示。

图8 穴盘二值图像各行、列像素统计值Fig.8 Row and column pixel statistical value of binary images of plug tray frame area
由图8知,横向、纵向波峰两侧与穴孔边界一一对应,波峰两侧坐标即为该穴孔边对应像素点的坐标,根据行、列像素统计值的波峰横坐标与峰宽度、波峰两侧的横纵像素坐标,同时结合穴盘穴孔的规格化结构,即可准确地确定每个孔穴边界及其中心坐标位置,既为穴孔是否缺苗判定时统计幼苗像素提供了明确的边界,也为补苗末端执行器提供精确的位置信息。
2.4 缺苗判断
现代工厂化育苗均采用精量播种,穴盘穴孔填加基质后经压穴工序,使穴孔中的基质表面呈锥孔,播种后种子基本位于穴孔中心,因此幼苗在育苗早期子叶、真叶一般在穴孔区域内。缺苗判断原理:在幼苗特征的二值图像中,白色部分为幼苗,像素值设为1,其余黑色部分为非幼苗区域,其像素值设为0;根据上述确定的穴孔边界,对每穴孔边界内的幼苗图像素进行统计,如果像素统计值之和大于设定阈值即为有苗,反之缺苗。
对试验采集的苗龄为25、35 d的拟南芥穴盘苗各6幅彩色图像均按照上述方法进行了幼苗与穴盘特征图像提取、穴格边界确定、穴孔内幼苗图像像素统计,然后对穴孔是否缺苗进行判定。因同龄幼苗长势基本一致,其子叶及真叶的面积相差较小,同龄穴盘苗图像处理结果、幼苗像素统计结果类似,故仅以图3中苗龄为25、35 d拟南芥穴盘苗的处理结果为例进行分析。图3中苗龄为25、35 d的拟南芥穴盘苗各穴孔幼苗像素统计值如表1所示。

表1 拟南芥穴盘苗各穴孔幼苗投影面像素统计值Table 1 Pixel statistical value of plug hole projection planes of Arabidopsis plug seedlings
由表1知,苗龄为25、35 d拟南芥穴盘苗,有苗穴孔的幼苗像素统计值分别为1895~4572、3386~8710,而无苗穴孔的幼苗像素统计值均为0,有苗穴孔与无苗穴孔的像素统计值差异极显著;对照苗龄25、35 d的拟南芥穴盘苗彩色图像知,缺苗检测结果与穴盘穴孔有无幼苗的实际情况完全相符,因此,可以通过图像识别的方法进行穴盘苗缺苗检测并确定穴孔位置。另外,幼苗像素统计值与其叶的投影面积相对应,表1中显示同龄幼苗叶片投影响面积有较大差异,其值直接反应幼苗的长势,在实际补苗过程中,可以根据幼苗在不同生长阶段设定合适的面积阈值,对与小于设定阈值的幼苗检测时判断为发育不良幼苗,对缺苗、发育不良苗的穴孔统一补入同龄且面积阈值达到要求的健康苗,从而为全自动移栽提供长势一致、无空穴的穴盘苗。
为了进一步验证系统对缺苗检测的效果,对苗龄为25、35 d拟南芥穴盘苗各6盘分别进行缺苗检验,并计算空穴和有苗穴检测的准确率,结果如表2,缺苗检测系统对空穴、有苗穴的判定正确率均为100%。可见,缺苗检测系统对育苗早期不同苗龄穴盘苗缺苗检测具有良好的适应性。但对不同种类和不同规格穴盘的幼苗其检测方法与效果还有待进一步研究。
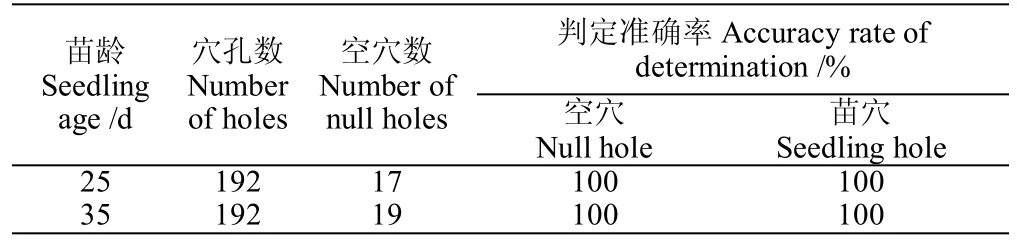
表2 32穴标准穴盘拟南芥苗缺苗检测结果Table 2 Results of seedling shortage detection for Arabidopsis seedlings in standard plug tray with 32 holes
3 结论
由于种子质量、育苗环境等因素造成蔬菜穴盘苗空穴多的问题,为了消除穴盘苗空穴,研制了以缺苗检测系统、补苗系统为核心部件的蔬菜穴盘苗自动补苗试验台,缺苗检测系统由CMOS工业相机、控制器、计算机组成的图像获取硬件系统和在MATLAB环境下编写的图像处理软件系统组成,能够自动完成穴盘苗图像采集与处理。
1)通过对穴盘苗彩色图像的R、G、B3个颜色分量采用不同的线性变换获得幼苗和穴盘的灰度图,对幼苗灰度图进行阈值分割、去噪处理能够有效提取出幼苗特征图像;穴盘灰度图经阈值分割、去除幼苗特征信息、降噪处理得到穴盘特征图像,并根据穴盘特征图像像素在行列统计值峰值与峰宽以及穴盘规格化结构,能够准确地确定每个穴孔的边界,为缺苗检测提供了幼苗图像特征信息所在穴孔的范围。
2)对苗龄为25、35 d的拟南芥穴盘苗各192穴进行缺苗检测,结果表明:穴孔边界内有苗穴孔与无苗穴孔的幼苗像素统计值差异极显著,以幼苗图像像素统计值判断穴盘的空穴、有苗穴正确率均为100%;幼苗像素统计值与其茎叶投影面积相对应,可以通过幼苗生长期设定健康苗阀值并去除发育不良的幼苗。
[1]梁喜凤,肖玺泽,朱宇豪,等.子叶期钵苗补苗末端执行器设计与试验[J].农业工程学报,2018,34(9):49-57.Liang Xifeng,Xiao Xize,Zhu Yuhao,et al.Design and experiment on pot-seedling supplementing end-effector for vegetables in cotyledon phase[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2018,34(9):49-57.(in Chinese with English abstract)
[2]陈清,云建,陈永生,等.国内外蔬菜移栽机械发展现状[J].蔬菜,2016(8):76-79
[3]Parish R L. Current developments in seeders and transplanters for vegetable crops[J].Hort Technology,2005,15(2):346-351.
[4]王永维,何焯亮,王俊,等.旱地蔬菜钵苗自动移栽机栽植性能试验[J].农业工程学报,2018,34(3):19-25.Wang Yongwei,He Zhuoliang,Wang Jun,et al.Experiment on transplanting performance of automatic vegetable pot seedling transplanter for dry land[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2018,34(3):19-25.(in Chinese with English abstract)
[5]于晓旭,赵匀,陈宝成,等.移栽机械发展现状与展望[J].农业机械学报,2014,45(8):44-53.Yu Xiaoxu,Zhao Yun,Chen Baocheng,et al.Current situation and prospect of transplanter[J].Transactions of the Chinese Society for Agricultural Machinery,2014,45(8):44-53.(in Chinese with English abstract)
[6]梁喜凤,蔡阳阳,王永维.番茄钵苗自动移栽钵体物理机械特性试验[J].浙江大学学报:农业与生命科学版,2015,41(5):616-622.Liang Xifeng,Cai Yangyang,Wang Yongwei.Experiment on physical and mechanical properties of tomato seedling pot for automatic vegetable transplanter[J].Journal of Zhejiang University:Agric&Life Sci,2015,41(5):616-622.(in Chinese with English abstract)
[7]倪有亮,金诚谦,刘基.全自动移栽机取送苗系统的设计与试验[J].农业工程学报,2015,31(23):10-19.Ni Youliang,Jin Chengqian,Liu Ji.Design and experiment of system for picking up and delivering seedlingsin automatic transplanter[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(23):10-19.(in Chinese with English abstract)
[8]王永维,唐燕海,王俊,等.蔬菜钵苗高速移栽机吊杯式栽植器参数优化[J].农业机械学报,2016,47(1):91-100.Wang Yongwei,Tang Yanhai,Wang Jun,et al.Parameters’optimization forthe dibble-type planting apparatusof vegetable pot seedling transplanter in high-speed condition[J].Transactions of the Chinese Society for Agricultural Machinery,2016,47(1):90-100.(in Chinese with English abstract)
[9]金鑫,李树君,杨学军,等.蔬菜钵苗取苗机构运动分析与参数优化[J].农机化研究,2014,36(7):13-17.Jin Xin,Li Shujun,Yang Xuejun,et al.Motion analysis for vegetable potted seedling pick-up mechanism with double crank geared linkages[J]. Journal of Agricultural Mechanization Research,2014,36(7):13-17.(in Chinese with English abstract)
[10]韩长杰,杨宛章,张学军,等.穴盘苗移栽机自动取喂系统的设计与试验[J].农业工程学报,2013,29(8):51-61.Han Changjie,Yang Wanzhang,Zhang Xuejun.Design and test of automatic feed system for tray seedlings transplanter[J].Transactions ofthe Chinese Society of Agricultural Engineering(Transactions of the CSAE),2013,29(8):51-61.(in Chinese with English abstract)
[11]李华,曹卫彬,李树峰,等.2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机的研制[J].农业工程学报,2017,33(15):23-33.Li Hua,Cao Weibin,Li Shufeng,et al.Development of 2ZXM-2 automatic plastic film mulching plug seedling transplanter for vegetable[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(15):23-33.(in Chinese with English abstract)
[12]瓜菜作物种子 第3部分:茄果类:GB 16715.3-2010[S].
[13]Onyango C M,Marchant J A.Segmentation of row crop plants from weeds using colour and morphology[J].Computers and Electronics in Agriculture,2003,39(3):141-155.
[14]陈晓光,周云山,卢贤继.图象处理技术在蔬菜栽培中的应用[J].农业工程学报,1994,10(4):131-136.Chen Xiaoguang,Zhou Yunshan,Lu Xianji.The application of image processing technology in vegetable cultivating[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),1994,10(4):131-136.(in Chinese with English abstract)
[15]任烨.基于机器视觉设施农业内移栽机器人的研究[D].杭州:浙江大学,2007.Ren Ye.DevelopmentofTransplantingrobotin Facility Agriculture Based on Machine Vision[D].Hangzhou:Zhejiang University,2007.(in Chinese with English abstract)
[16]蒋焕煜,施经挥,任烨,等.机器视觉在幼苗自动移钵作业中的应用[J].农业工程学报,2009,25(5):127-131.Jiang Huanyu,Shi Jinghui,Ren Ye,et al.Application ofmachine vision on automatic seedling transplanting[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2009,25(5):127-131.(in Chinese with English abstract)
[17]Tai Y W,Ling P P,Ting K C.Machine vision assisted robotic seedling transplanting[J].Transactions of the ASAE,1994,37(2):661-667.
[18]Ryu K H,Kim G,Han J S.Development of a robotic transplanter for bedding plants[J]J Agric.Engng Res,2001,78(2):141-146
[19]Albertus J V V. Multiple transplanting apparatus:US20040020110A1[P].2004-02-05.
[20]郁玉峰.三平移并联移栽机器人及其视觉系统研究[D].镇江:江苏大学.2007.Yu Yufeng.Three Translations Parallel Transplant Robot and It’s Machine Vision System [D].Zhenjiang:Jiangsu University,2007.(in Chinese with English abstract)
[21]胡飞,尹文庆,陈彩蓉,等.基于机器视觉的穴盘幼苗识别与定位研究[J].西北农林科技大学学报:自然科学版,2013,41(5):183-188.Hu Fei,Yin Wenqing,Chen Cairong,et al.Recognition and localization of plug seedling based on machine vision[J].Journal of Northwest A&F University:Natural Science Edition,2013,41(5):183-188.(in Chinese with English abstract)
[22]贺磊盈,杨太玮,武传宇,等.基于贪心遗传算法的穴盘苗补栽路径优化[J].农业机械学报,2017,48(5):36-43.He Leiying,Yang Taiwei,Wu Chuanyu,et al.Optimization ofreplugging tourplanning based on greedy genetic algorithm[J].Transactions ofthe Chinese Society for Agricultural Machinery,2017,48(5):36-43.(in Chinese with English abstract)
[23]童俊华,蒋焕煜,武传宇.基于贪心算法的温室钵苗稀植移栽路径优化[J].农业机械学报,2016,47(3):8-13.Tong Junhua,Jiang Huanyu,Wu Chuanyu.Optimization of seedlings lower density transplanting path based on greedy algorithm[J].Transactions ofthe Chinese Society for Agricultural Machinery,2016,47(3):8-13.(in Chinese with English abstract)
[24]童俊华,蒋焕煜,周鸣川.基于遗传算法的穴盘苗自动移钵路径优化[J].农业机械学报,2013,44(4):45-49,26.Tong Junhua,Jiang Huanyu,Zhou Mingchuan.Optimization of seedling transplanting path based on genetic algorithm[J].Transactions of the Chinese Society for Agricultural Machinery,2013,44(4):45-49,26.(in Chinese with English abstract)
[25]童俊华.蔬菜钵苗穴盘间移栽执行器设计、移栽信息检测与路径规划[D].杭州:浙江大学.2014 Tong Junhua.End-effectDesign,Seedling Information Inspection and Path Planning for Transplanting between Vegetable Seedling Trays[D]. Hangzhou: Zhejiang University,2007.(in Chinese with English abstract)
[26]刘姣娣,曹卫彬,许洪振,等.自动补苗装置精准定位自适应模糊PID控制[J].农业工程学报,2017,33(9):37-44.Liu Jiaodi,Cao Weibin,Xu Hongzhen,et al.Adaptive fuzzy-PID control of accurate orientation for auto-detect seedling supply device[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(9):37-44.(in Chinese with English abstract)
[27]金鑫.蔬菜穴盘苗自动移栽技术与装置的研究[D].北京:中国农业大学,2014.Jin Xin.Research on Automatic Transplanting Technology and Device for Vegetable Plug Seedling[D].Beijing:China Agricultural University,2014.(in Chinese with English abstract)
[28]吴俭敏,张小超,金鑫,等.穴盘钵苗自动识别及控制装置的设计与试验[J].农业工程学报,2015,31(1):47-52.Wu Jianmin,Zhang Xiaochao,Jin Xin,et al.Design and experiment on transplanter pot seedling disk conveying and positioning control system[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(1):47-52.(in Chinese with English abstract)
[29]肖玺泽,王永维,王俊,等.穴盘苗包裹式补苗专用机械爪及补苗方法:201610709136.9[P].2017-02-01.
[30]王俊,任奇锋,谢卢鑫.自动补苗机构械作业装置:201510051121.3[P].2015-02-01.
[31]求是科技.MATLAB7.0从入门到精通[M].北京:人民邮电出版社,2006:393-395.
[32]胡小峰,赵晖.Visual C++与MATLAB图像处理与识别实用案例精选[M].北京:人民邮电出版社, 2004:93-95.
[33]付忠良.图像阈值选取方法-Otsu方法的推广[J].计算机应用, 2000, 20(5): 37-39.
猜你喜欢
农业机械学报(2022年11期)2023-01-05
四川党的建设(2022年13期)2022-07-07
农业工程技术·温室园艺(2021年3期)2021-07-08
农业工程技术(2021年7期)2021-05-31
农业工程学报(2021年3期)2021-04-15
四川蚕业(2020年3期)2020-07-16
山西农经(2019年4期)2019-06-11
农业工程学报(2018年21期)2018-11-05
现代园艺(2018年15期)2018-01-18
农家科技下旬刊(2016年4期)2016-11-19