基于Micro-CT的黄瓜苗坨夹取破损检测及取苗参数优化
2018-07-19 15:23毛罕平韩绿化徐静云马国鑫李亚雄
农业工程学报 2018年12期
刘 洋,毛罕平,韩绿化,徐静云,马国鑫,李亚雄
(1.江苏大学现代农业装备与技术教育部重点实验室,镇江 212013;2.江苏省农业装备与智能化高技术研究重点实验室,镇江 212013;3.新疆农垦科学院机械装备研究所,石河子 832000)
0 引 言
育苗移栽可以提高作物的产量和品质,在中国蔬菜种植过程中得到了重视[1-2]。为了提高蔬菜移栽效率和质量,机械移栽技术得到了推广应用[3],但是目前在生产中使用的都是半自动移栽机,没有实现自动移栽机的应用,主要原因是自动取苗时苗坨易夹碎破损,导致取苗成功率降低[4-5]。针对这个问题,国内外学者已经进行了研究。Ryu等[6]研究了针形、叉子形和铲子形取苗爪的取苗效果。Choi等[7]设计了一种五杆取苗机构,研究了苗龄、夹取角度和插入深度等因素与取苗成功率之间的关系。童俊华等[8]以夹针对苗坨的夹紧力为优化目标开展单因素试验,优化了夹针夹持角度、夹针数量、苗坨含水率和基质配比。王跃勇等[9]以取苗时苗坨完整率为指标,试验研究了针形、压舌板形和U形取苗爪的性能。高国华等[10]设计了一种斜入式取苗爪,研究了夹针插入苗坨点的距离、插入深度和角度等因素与苗坨极限破坏力之间的关系。这些研究讨论了夹针的结构和工作参数对取苗成功率的影响,为自动移栽机的设计起到了很好的推进作用,但是没有关注苗坨的破损是如何形成的。
夹取苗坨时,苗坨中新生孔隙和裂缝的形成是导致苗坨破损的主要原因[11],这些现象都是在苗坨内部发生,无法直观的观察到。本文以黄瓜穴盘苗为研究对象,利用X射线微型计算机断层扫描技术(Micro-CT)对处于夹取状态的黄瓜苗坨进行扫描,将根系和孔隙从苗坨中提取并三维重构[12-13],研究苗坨的破损行为,找到苗坨破损的表达方法,在此基础上优化夹取参数,以期为自动移栽机取苗爪结构的设计和参数选择提供理论依据。
1 试验材料与方法
1.1 试验材料
试验用黄瓜穴盘苗用128孔穴盘育苗,穴孔的尺寸为高40 mm,上边宽31 mm,下边宽13 mm,体积为19.45 cm3;育苗基质由草炭、珍珠岩和蛭石按3∶1∶1混合,1.2倍穴孔体积装盘[14-15]。在江苏大学智能温室中进行培育,试验时苗龄28 d。
试验用仪器为江苏大学现代农业装备与技术教育部重点实验室从瑞士SCANCO Medical AG公司引进的Micro-CTμ100,该仪器额定分辨率0.5μm,图像信息采集计算机采用HP Itanium 64位工作站,操作系统为OpenVMS,系统中有IPL(image processing language)图像处理语言可用于体积和距离测量。
扫描时,黄瓜穴盘苗和取苗爪必须放置在内径和高为100 mm´120 mm的样本容器中,为此设计了可用于Micro-CT扫描的夹取装置(图1a)。该装置的取苗爪为两指四针结构[16],由取苗臂和夹针组成,转动调位螺母,2个取苗爪可以对称的横向收缩。为了避免金属伪影对根系和孔隙分割提取质量的影响[17-18],夹取装置的底座、支撑柱、盖板由PVC材料制成,夹针选用密度为2.08 g/cm3的玻璃纤维材料制成;放置穴盘苗的苗盒壁厚为2 mm(图1b),密度为 1.01 g/cm3。

图1 夹取装置和苗盒示意图Fig.1 Schematic diagram of pinch extraction device and seedling box
1.2 试验方法
1.2.1 试验方案
为了研究取苗时苗坨的破损行为和优化取苗爪夹取参数,安排试验方案为:
1)根系和孔隙的三维重构。取苗爪夹取苗坨是一个运动过程,但是Micro-CT只能对处于静止状态的黄瓜苗坨进行扫描。为此对同一个样本分别在苗坨未插入夹针(T1)、夹针插入苗坨(T2)和夹针横向收缩到最大位移(T3)3个状态进行扫描,并将根系和孔隙提取并三维重构(图2)。
2)苗坨破损行为的研究。用2.5 mm的圆针,在夹取初始角度α为9°(图2b),夹针插入苗坨深度和收缩位移为35和5 mm的条件下扫描。为了研究根系和孔隙在苗坨中的分布,在垂直和水平方向将苗坨都划分成6等份(图3)。将根系体积、孔隙的体积与苗坨体积的比值定义为根系密度、孔隙密度,用SPSS18软件对体积和分布密度进行统计。
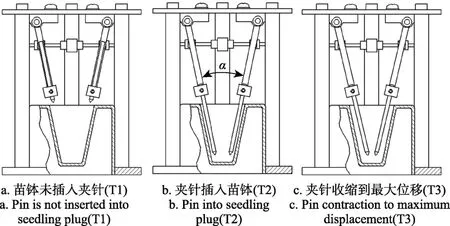
图2 夹针收缩运动分解示意图Fig.2 Schematic diagram of pin contraction motion

图3 苗坨划分示意图Fig.3 Schematic diagram of plug division
3)优化取苗爪夹取参数。取苗爪的夹针形状、直径和夹取初始角是影响苗坨破损的关键参数[16,19],以这3个参数为因素进行试验。目前取苗机构主要是多针结构的取苗爪,为了将穴盘苗可靠的从穴孔中取出,夹针的形状可以取圆形或者扁形[6,9]。为了保持夹针的强度,避免夹针在夹取苗坨时变形,夹针的直径不能过细,试验中取夹针的直径为2、2.5和3 mm。夹取苗坨的初始角度不应大于穴孔壁面的夹角[16],128孔穴盘的穴孔壁面夹角为11°,试验中取夹取初始角度为7°、9°和11°。具体的试验方法为,在夹针插入苗坨深度和收缩位移分别为35和5 mm的条件下[11],首先取夹取初始角度为9°,改变夹针直径进行扫描,然后取夹针直径为2.5 mm,改变夹取初始角度进行扫描,研究苗坨的破损行为,找到苗坨低破损的夹取参数。共进行12组扫描试验,每组扫描样本5个,需要60个样本。
4)用自动取苗机构进行试验,验证优化的夹取参数。
1.2.2 扫描参数设置
扫描时,Micro-CT的参数设置为:电压45 kV电流75mA,Al0.1过滤器,分辨率50mm,断层图片整合时间400 ms,每次扫描都设置相同的起始参照线[20]。苗坨的含水率取30%~35%[21],此时苗坨的密度为1.72 g/cm3。
2 试验结果与分析
2.1 玻璃纤维夹针适用性验证
为了验证玻璃纤维夹针的适用性,用英国Stable Micro System 公司 TA-XT2i型号质地分析仪对直径为2.5 mm的钢夹针和玻璃纤维夹针进行悬臂压缩,悬臂长度为50 mm,压缩量和压缩速度为4 mm、1 mm/s,分别取10个样本进行测试。图4是典型的压缩量和抗压力曲线,可以看到2条曲线都呈直线关系。韩绿化等[22]指出取苗爪夹取力应大于苗坨屈服点的抗压力,并测得黄瓜苗坨的屈服点抗压力为6.33 N。此时,钢和玻璃纤维夹针的平均压缩量分别为0.863和0.917 mm,相差0.064 mm,误差不显著,可以用玻璃纤维夹针替代圆钢夹针进行夹取扫描试验。

图4 压缩量-抗压力曲线Fig.4 Compressive amount-compressive force curve
2.2 根系和孔隙的三维重构
图5为苗坨扫描生成的断层图片,以及分割提取的根系和孔隙三维可视化图形。

图5 根系和孔隙的三维可视化图形Fig.5 Three-dimensional visualization of root and pore
对黄瓜苗坨扫描后(图5a),会生成多张体素尺寸为50mm的断层图片(图5b),在断层图片中根系与育苗基质的对比度很低,无法区分出所有根系,但是可以直观的辨别出主根所在的位置。围绕主根绘制封闭的边界线,可以在OpenVMS系统中得到根系的阈值为93~102。对所有断层图片执行阈值分割命令,并去除离散点,得到根系的三维图(图5c),在图中包含有团状的育苗基质,这是因为局部的育苗基质和根系的X射线衰减系数重叠在一起[23-24],无法将育苗基质完全从根系中分离出,但是生成的根系三维图已经可以清晰的表达根系的空间结构。用同样的方法在断层图片中围绕孔隙绘制边界线(图5b),可以获得孔隙的阈值为0~16,通过阈值分割和重构得到孔隙的三维图(图5d)。
2.3 夹取过程根系的分布特性
图6为夹取过程根系在垂直和水平方向的分布。
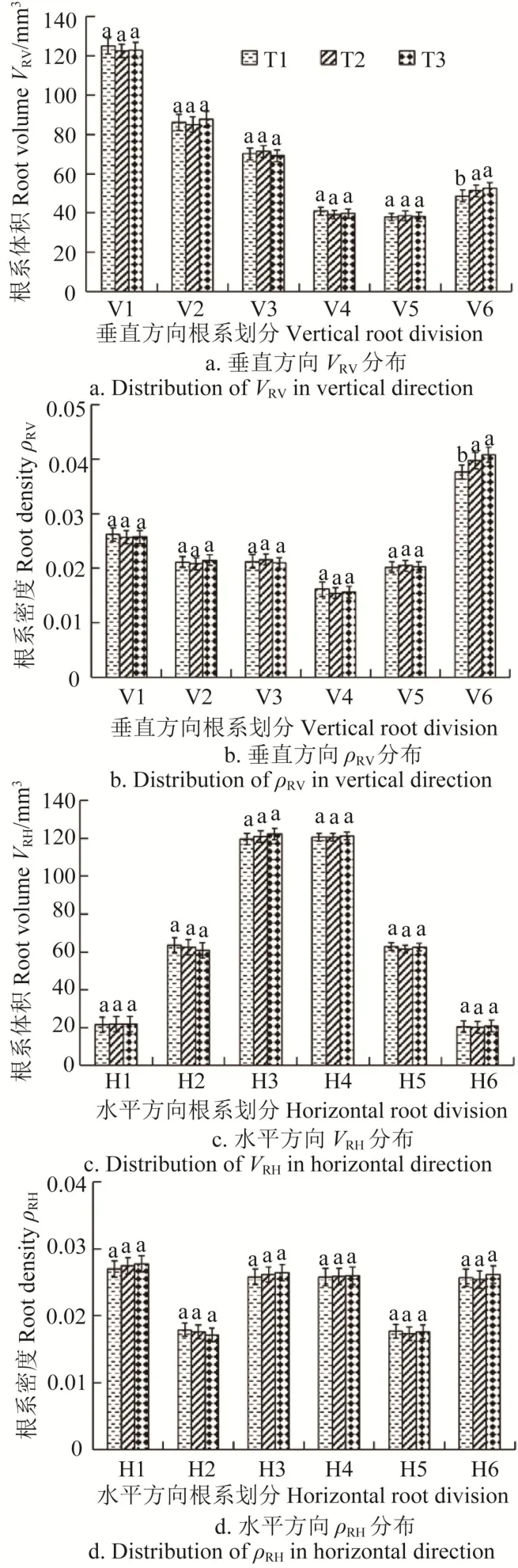
图6 夹取过程根系的分布Fig.6 Root distribution in gripping process
在垂直方向,每种夹取状态下根系体积VRV都是先减小然后增大(图6a)。在T1状态,V1到V6区域VRV分别为125.1、86.2、70.1、41.0、37.9和48.6 mm3。当夹针收缩移动到T3状态时,与T1状态相比较,V1、V3和V4区域的VRV分别减小1.67%、1.45%和3.21%,V2和V5区域的VRV分别增加1.77%和0.38%,每个区域的VRV变化不显著;V6区域VRV增加8.02%,VRV变化显著(P<0.05)。T1状态时,垂直方向上根系的分布密度ρRV在 V1到 V6区域分别为 0.026、0.021、0.022、0.016、0.020和0.037(图6b)。当夹针收缩移动到T3状态时,与T1状态相比较,V1到V4区域的ρRV变化范围是0.38%~3.21%,且每个区域的ρRV变化不显著,而V6区域ρRV增加8.37%,且ρRV变化显著(P<0.05)。
在水平方向,每种夹取状态下根系体积VRH都是先增大然后减小,近似的呈对称分布(图6c)。在T1状态,H1到H6区域VRH分别为21.4、63.6、119.6、120.5、62.9和20.4 mm3。T3较T1状态,H1、H3、H4和H6区域的VRH分别增加2.73%、2.29%、0.75%和1.66%,H2和H5区域的VRH分别减小4.32%和0.52%,每个区域的VRH变化不显著。T1状态时,水平方向上根系的分布密度ρRH在 H1到 H6区域分别为 0.027、0.018、0.025、0.026、0.018和0.026(图6d)。T3较T1状态,H1到H6区域的ρRH变化范围是0.52%~4.32%,每个区域的ρRH变化不显著。
在T1状态,垂直方向上V1和V6分别是根系体积和分布密度最高的2个区域,这是因为穴孔的上端开放,下端有漏水孔,这2个部位良好的透气性促进了根系的生长[13,25];水平方向上H3和H4区域根系体积和分布密度较高,这是因为主根主要分布在这个位置,H1和H6区域的根系体积虽然很小,但是分布密度非常高,说明根系在这个位置聚集较多;根系分布的不均匀,会使苗坨夹取时易发生断裂破损[25]。
以T1状态的根系可视化图形为例(图7),侧根从主根向四周发散生长,当侧根接触到穴孔壁面后,开始沿着穴孔壁面生长,将苗坨缠绕包裹住。侧根主要分布在苗坨外围,夹取苗坨时,夹针没有接触外围的根系,只扰动部分发散生长的侧根。在T1和T3状态,分别测量同一位置最外围侧根到主根的距离和两根发散生长的侧根之间的距离,得到最外围侧根到主根的距离和两根发散生长的侧根之间距离的位移分别为0.08和0.12 mm,根系的位移很小。
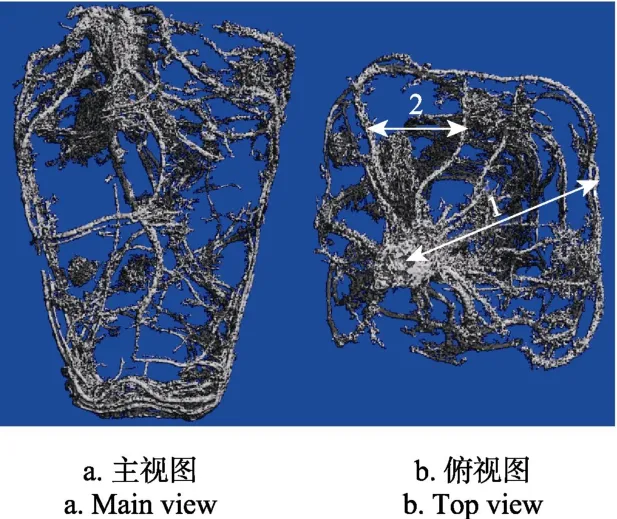
图7 T1状态根系的主视和俯视图Fig.7 Main and top view of root at T1 state
2.4 夹取过程孔隙的分布特性
图8为夹取过程孔隙的分布状况。
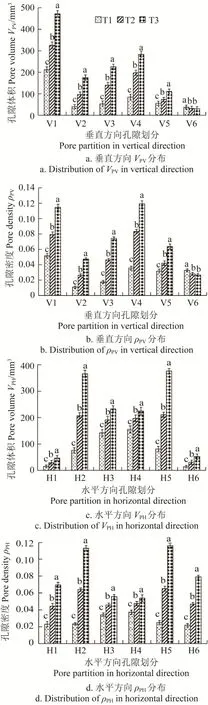
图8 夹取过程孔隙的分布Fig.8 Pore distribution in gripping process
在垂直方向,每种夹取状态下孔隙体积VPV变化趋势都不相同(图8a)。在T1状态,V1到V6区域VPV分别为213.1、40.2、53.5、84.6、55.7和37.7 mm3。当夹针收缩到T3状态时,与T1状态相比,V1到V5区域VPV分别增加121.68%、336.82%、320.93%、235.58%和100.18%,而V6区域减少25.99%,每个区域的VPV变化非常显著(P<0.05)。T1状态孔隙的分布密度ρPV从V1到V6区域分别为0.052、0.011、0.018、0.036、0.031和0.032(图8b)。T3状态与T1状态相比,V1到V5区域ρPV增加100.27%~337.03%,而V5区域ρPV减少25.43%,每个区域的ρPV变化非常显著(P<0.05)。
在水平方向,每种夹取状态下孔隙体积VPH都近似的呈对称分布(图8c)。T1状态时,H1到H6区域VPH分别为15.3、75.7、142.4、155.5、80.8和14.4 mm3。当夹针收缩到T3状态时,与T1状态相比,H1到H6区域VPH分别增加201.96%、383.35%、63.34%、44.82%、365.35%和263.19%,每个区域的VPH变化非常显著(P<0.05)。T1状态孔隙的分布密度ρPH从H1到H6区域分别为0.023、0.024、0.034、0.037、0.025和0.022(图8d)。T3状态与T1状态相比,H1到H6区域ρPH增加44.85%~382.97%,每个区域的ρPH变化非常显著(P<0.05)。
图9清晰的表达了夹取过程中新生孔隙的形成过程。T1状态时,在苗坨的顶端有孔隙聚集现象,其他部位孔隙离散的分布在苗坨中(图9a);T2状态时,在夹针周围开始有聚集的新生孔隙产生(图9b);当夹针收缩到T3状态时,在夹针周围新生的孔隙扩展并连接在一起,形成了裂缝(图3c)。在T2和T3状态的俯视图可以看到,在夹针之间也有裂缝形成,这是因为夹针在夹取苗坨时会产生剪切应力,在剪切应力方向育苗基质发生滑移,形成裂缝[26]。
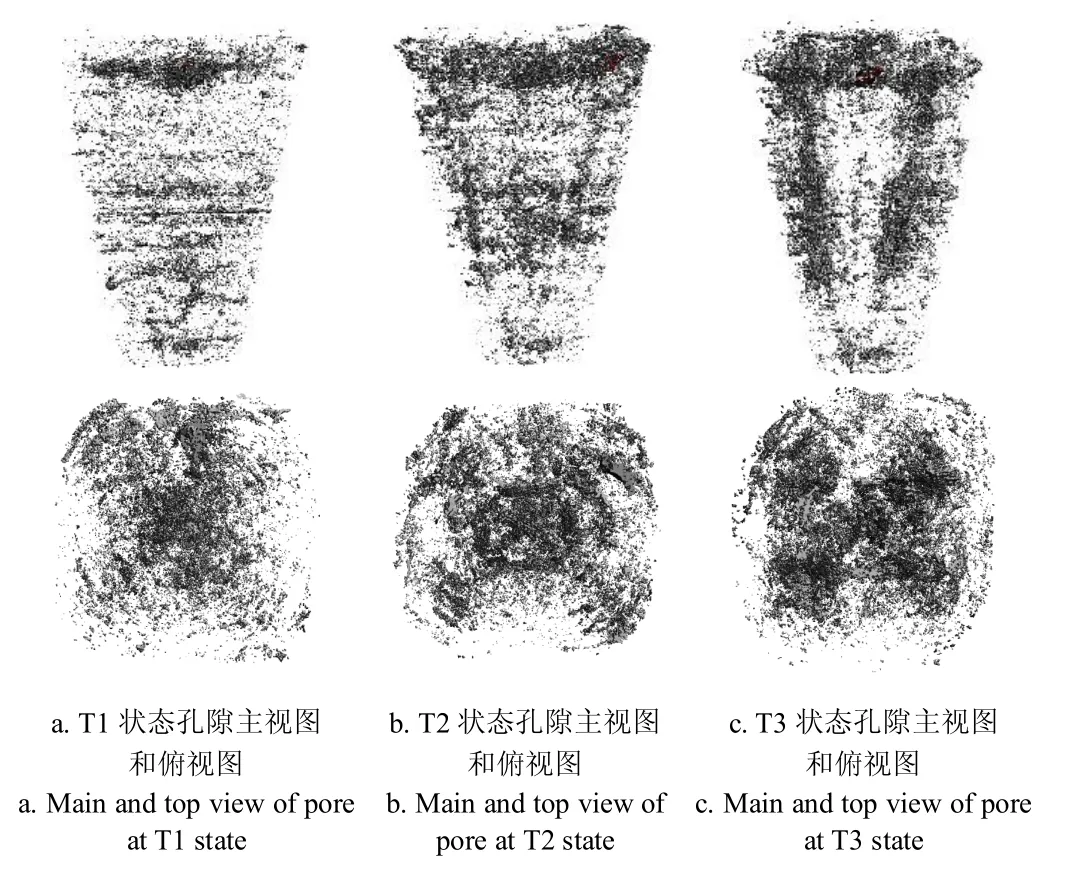
图9 夹取过程孔隙的三维可视化图形Fig.9 Three-dimensional visualization of pore in pinch process
2.5 苗坨破损评价指标的制定
通过对夹取过程中根系和孔隙的分布特性分析可以得出,根系未发生显著位移,根系的作用是将苗坨包裹住,防止苗坨散坨。孔隙的体积和分布密度变化非常显著,可以得出新生孔隙的产生和裂缝的形成是导致苗坨破损的主要原因[11,27]。夹针直接接触的H2和H5区域在水平方向孔隙体积和分布密度增加最大,这2个区域孔隙的聚集和扩展会在苗坨中形成断面,使夹针内部的育苗基质与苗坨分离,导致苗坨破碎[7,16];V1区域在苗坨的最外端,没有根系包裹,该区域孔隙的增加,会使育苗基质发生散落;V4区域孔隙体积的增加量明显大于V5区域,这会使苗坨在V4和V5区域之间发生应力集中,导致苗坨发生断裂;破碎、散落和断裂都是苗坨破损的表现形式。因此,可以用V1、V4、H2和H5区域孔隙体积的增加量ΔV作为评价苗坨破损程度的指标,并认为减小ΔV有利于减少苗坨破损。
2.6 夹取参数的优化
图10a是不同直径条件下ΔV的分析值。夹针直径为2、2.5和3 mm时,圆针的ΔV值分别为925.2、1 043.7和1 253.7 mm3,扁针的ΔV值分别为1 031.5、1 138.4和1 372.2 mm3。2种形状夹针的ΔV值都随着夹针直径的增大而增加。图10b是不同夹取初始角条件下ΔV的分析值。夹取初始角为7°、9°和11°时,圆针的ΔV值分别为1 328.7、1 043.9和895.4 mm3,扁针的ΔV值分别为1 452.3、1 138.4和983.5 mm3。两种夹针的ΔV值都随着夹取初始角的增大而减小。
通过图10的分析可知,减小夹针直径和增大夹持初始角可以减小苗坨破损,在相同夹取条件下,圆针夹取苗坨的破损量始终小于扁针。但是,取苗爪在夹取苗坨时,不仅要减小苗坨破损量,还要保持一定的夹持力,使苗坨克服与穴孔壁面之间的粘附力[27-28]。
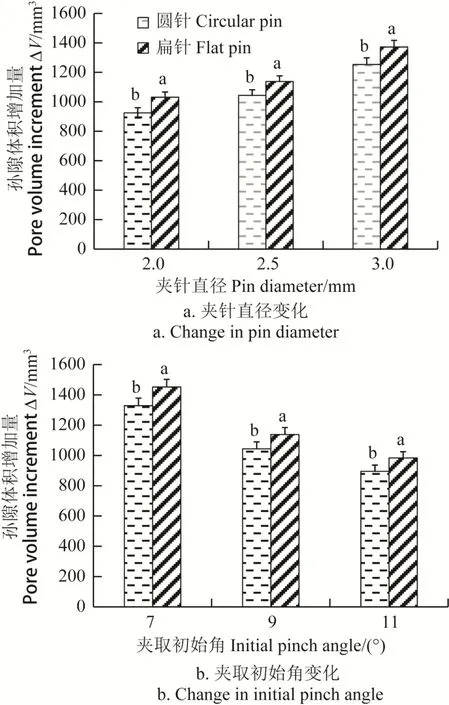
图10 不同夹取直径和夹取初始角条件下孔隙体积增量DV的分布Fig.10 Distribution of pore volume incrementDV under different pin diameters and initial pinch angle
在质地分析仪上,分别用圆针和扁针压缩苗坨,可以得到压缩量-抗压力曲线(图11)。可以看到,2条曲线有相似的变化趋势,在压缩开始阶段,抗压力随着压缩量的增加缓慢增大;当抗压力为0.83 N(A点)时,抗压力与压缩量呈近似的直线增大;当两条曲线的抗压力达到7.31N(B1和B2点)时,抗压力与压缩量之间不再呈近似的直线,苗坨表现出压实硬化特性[29-30]。B1和B2点是苗坨压缩屈服点,此时B1和B2点对应的压缩量分别为4.26和4.75 mm,在该压缩量条件下扁针和圆针夹取苗坨的ΔV值分别为786.1和843.7 mm3。在相同的夹取力条件下,扁针夹取苗坨的破损量小于圆针。

图11 压缩量-抗压力曲线Fig.11 Compressive amount-compressive force curve
3 取苗试验
为了验证2.6节讨论得到的取苗爪夹取参数的性能,进行取苗试验。试验用取苗机构如图12a所示,该机构可以实现整排隔穴取苗,取苗爪为两指四针结构,由1个柱塞气缸控制夹针的收缩运动(图12b)[31]。
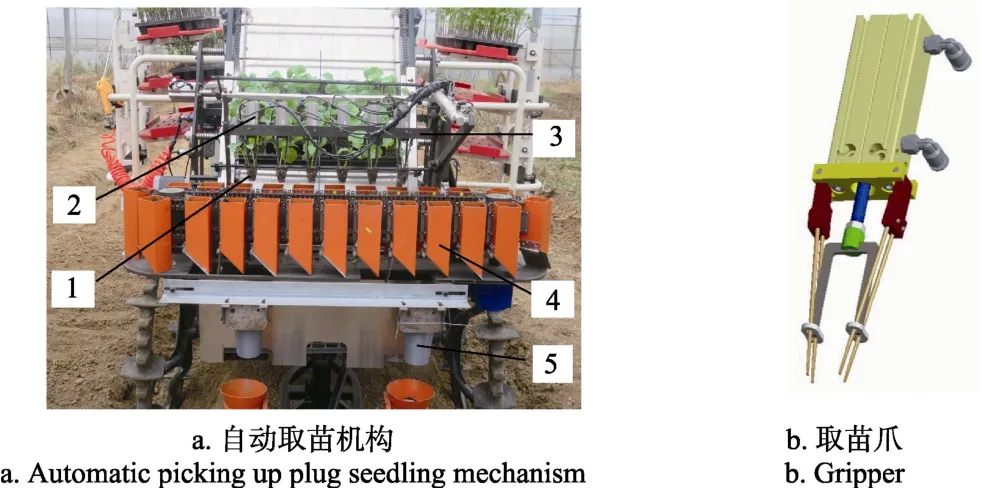
图12 取苗试验装备和取苗爪Fig.12 Experiments equipment and gripper of picking up plug seedlings
试验参数组合见表1,试验时取苗频率设定为50株/min,每组参数取苗256株。认为苗坨质量损失大于25%为破损严重[1,7],用下式计算苗坨破损率。

式中P是苗坨破损率,%;N1是取苗株数;N2是苗坨质量损失大于25%的株数。
由表1中试验1、2、3、7、8和9可知,苗坨破损率随着2种形状夹针直径的增大而增加;由试验1、4、5、7、10和11可知,增大夹取初始角会减小苗坨破损率;相同的夹取力条件下,扁针的苗坨破损率小于圆针。由试验6和12可知,在相同夹针收缩量条件下,扁针夹取苗坨的破损率大于圆针;试验结果与苗坨中孔隙体积增加量ΔV的分析结果一致。可以得出,在满足夹取力为7.31 N的条件下,用2 mm的扁针,在夹取初始角为11°时取苗,有利于减小苗坨破损。

表1 取苗试验参数与结果Table 1 Experiments parameters and results of picking up plug seedlings
4 结论
1)利用Micro-CT对黄瓜穴盘苗进行无损检测,可以将根系和孔隙提取并三维重构。通过对根系和孔隙的体积和分布密度统计得出,夹取过程中,根系未发生显著位移,根系的作用是将苗坨缠绕包裹住,防止苗坨散坨;裂缝是由新生孔隙的聚集和扩展连接在一起形成的,它主要产在夹针周围和夹针之间,孔隙的聚集和裂缝的形成是导致苗坨破损的主要原因;苗坨中V1、V4、H2和H5区域的孔隙体积和分布密度增量最大。
2)对孔隙体积增加量ΔV统计可得,减小夹针直径和增大夹持初始角可以减小ΔV,在相同夹取收缩量条件下,圆针夹取苗坨的ΔV始终小于扁针,但是在夹取力等于苗坨屈服点的抗压力7.31 N时,圆针夹取苗坨的ΔV大于扁针。以质量损失25%作为判断苗坨破损的指标,进行取苗试验,结果表明直径为2 mm的扁针,在夹针收缩量和夹取初始角取4.26 mm和11°时,苗坨破损率为6.3%,小于其他参数的试验结果,与Micro-CT扫描分析结论一致。
[1]Jin Xin,Ji Jiangtao,Huang Zizhai,et al.Seedling pick-up mechanism of five-bar combined with ordinary gear train[J].International Agricultural Engineering Journal,2017,26(2):151-158.
[2]刘明峰,胡先朋,廖宜涛,等.不同油菜品种适栽期机械化移栽植株形态特征研究[J].农业工程学报,2015,31(增刊 1):79-88.Liu Mingfeng, Hu Xianpeng, Liao Yitao, et al.Morphological parameters characteristics of mechanically transplanted plantin suitable transplanting period for differentrape varieties[J].Transactionsof the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(Supp.1):79-88.(in Chinese with English abstract)
[3]李华,曹卫彬,李树峰,等.2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机的研制[J].农业工程学报,2017,33(15):23-33.Li Hua,Cao Weibin,Li Shufeng,et al.Development of 2ZXM-2 automatic plastic film mulching plug seedling transplanter for vegetable[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(15) :23-33.(in Chinese with English abstract)
[4]韩绿化,毛罕平,缪小花,等.基于穴盘苗力学特性的自动取苗末端执行器设计[J].农业机械学报,2013,44(11):260-265.Han Lühua,Mao Hanping,Miao Xiaohua,et al.Design of automatic picking up seedling end-effector based on mechanical properties of plug seedlings[J].Transactions of the Chinese society for Agricultural Machinery,2013,44(11):261-265.(in Chinese with English abstract)
[5]Jin Xin,Du Xinwu,Ji Jiangtao,et al.Mechanical property experiment of plug seeding with pots gripping-picking[J].International Agricultural Engineering Journal,2015,24(4):24-33.
[6]Ryu K H,Kim G,Han J S.Development of a robotic transplanter for bedding planting[J].J Agric Engng Res,2001,78(2):141-146.
[7]Choi W C,Kim D C,Ryu I K,et al.Development of a seedling pick-up device forvegetable transplanters[J].Transaction of the ASAE,2002,45(1):13-19.
[8]童俊华,蒋焕煜,蒋卓华,等.钵苗自动移栽机器人抓取指针夹持苗坨参数优化试验[J].农业工程学报,2014,30(16):8-16.Tong Junhua,Jiang Huanyu,Jiang Zhuohua,etal.Experiment on parameter optimization of gripper needles clamping seedling plug for automatic transplanter[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2014,30(16):8-16.(in Chinese with English abstract)
[9]王跃勇,于海业.穴盘幼苗机械手取苗基质完整率影响因素试验与分析[J].农业工程学报,2015,31(14):65-71.Wang Yueyong,Yu Haiye.Experiment and analysis of impact factors for soil matrix intact rate of manipulator for picking-up plug seedlings[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(14):65-71.(in Chinese with English abstract)
[10]高国华,冯天祥,李福.斜入式穴盘苗移栽手爪工作参数优化及试验验证[J].农业工程学报,2015,31(24):16-22.Gao Guohua,Feng Tianxiang,Li Fu.Working parameters optimization and experimentalverification ofinclinedinserting transplanting manipulator for plug seedling[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(24):16-22.(in Chinese with English abstract)
[11]韩绿化,毛罕平,胡建平,等.温室穴盘苗自动移栽机设计与试验[J].农业机械学报,2016,47(11):59-67.Han Lühua,Mao Hanping,Hu Jianping,et al.Design and test of automatic transplanter for greenhouse plug seedlings[J].Transactions of the Chinese society for Agricultural Machinery,2016,47(11):59-67.(in Chinese with English abstract)
[12]Mooney S J,Pridmore T P,Helliwell J,et al.Developing X-ray Computed Tomography to non-invasively image 3-D root systems architecture in soil[J].Plant Soil,2012,352:1-22.
[13]Saoirse T,Colin R B,Jeremy A R,et al.Quantifying the impact of soil compaction on root system architecture in tomato(Solanum lycopersicum)by X-ray micro-computed tomography[J].Annals of Botany,2012,110:511-519.
[14]Kumi F,Mao H,Li Q,et al.Assessment of tomato seedling substrate-root quality using X-ray computed tomography and scanning electron microscopy[J].American Society of Agricultural and Biological Engineers,2016,32(6):1-11.
[15]Kumar G V Prasanna,Raheman H. Volume of vermicompost-based potting mix for vegetable transplants determined using fuzzy biomass growth index[J].International Journal of Vegetable Science,2010,16(4):335-350.
[16]韩绿化,毛罕平,严蕾,等.穴盘育苗移栽机两指四针钳夹式取苗末端执行器[J].农业机械学报,2015,46(7):23-30.Han Lühua,Mao Hanping,Yan Lei,et al.Pincette-type end-effector using two fingers and four pins for picking up seedlings[J].Transactions of the Chinese society for Agricultural Machinery,2015,46(7):23-30.(in Chinese with English abstract)
[17]李铭,卢彦飞,袁刚,等.应用先验插值校正CT金属伪影[J].液晶与显示,2015,30(6):1032-1039.Li Ming,Lu Yanfei,Yuan Gang,et al.Metal artifact reduction in computed tomography based on prior interpolation[J].Chinese Journal of Liquid Crystals and Displays,2015,30(6):1032-1039.(in Chinese with English abstract)
[18]Patrick T.L,William P.P,Mary B P,et al.Metal artifact reduction image reconstruction algorithm for CT of implanted metal orthopedic devices:A work in progress[J].Skeletal Radiol,2009,38:797-802.
[19]蒋卓华,蒋焕煜,童俊华.穴盘苗自动移栽机末端执行器的优化设计[J].浙江大学学报(工学版),2017,51(6):1119-1125.Jiang Zhuohua,Jiang huanyu,Tong Junhua.Optimal design of end-effector on automatic plug seedling transplanter[J].Journal of Zhejiang University:Engineering Science,2017,51(6):1119-1125.(in Chinese with English abstract)
[20]Susan Z,Jonathan R H,Saoirse R T,et al.Effects of X-Ray dose on rhizosphere studies using X-ray computed tomography[J].Plos One,2013,8(6):1-8.
[21]Susan Z,Stefan M,Saoirse T,et al.Quantifying the effect of soil moisture content on segmenting root system architecture in X-ray computed tomography images[J].Plant Soil,2013,70:35-45.
[22]韩绿化,毛罕平,胡建平,等.穴盘苗自动移栽钵体力学特性试验[J].农业工程学报,2013,29(2):24-28.Han Lühua,Mao Hanping,Hu Jianping,et al.Experiment on mechanical property of seedling pot for automatic transplanter[J].Transactions ofthe Chinese Society of Agricultural Engineering(Transactions of the CSAE),2013,29(2):24-28.(in Chinese with English abstract)
[23]Stefan M,Craig S,Darren M W,et al.On the evaluation of methods for the recovery of plant root systems from X-ray computed tomography images[J].Functional Plant Biology,2015,42:460-470
[24]Stefan M,Susan Z,Saoirse R,et al.Rootrak:Automated recovery of three-dimensional plant root architecture in soil from X-ray microcomputed tomography images using visual tracking[J].Plant Physiology,2012,(158):561-569.
[25]Richard JF,ChristopherN G,Matthew T,etal.Non-destructive quantification of cereal roots in soil using high-resolution X-ray tomography[J]. Journal of Experimental Botany,2012,63(7):2503-2511.
[26]Sun Wei,Hou Kepeng,Yang Zhiquan,et al.X-ray CT three-dimensional reconstruction and discrete element analysis of the cement paste backfill pore structure under uniaxial compression[J].Construction and Building Materials,2017,138:69-78.
[27]Yang Y,Ting K,GiacomelliG A.Factorsaffecting performance of sliding-needles gripper during robotic transplanting of seedlings[J]. American Society of Agricultural and Biological Engineers,1991,7(4):493-497.
[28]Han Lühua,Mao Hanping,Hu Jianping,et al.Development of a doorframe-typed swinging seedling pick-up device for automatic field transplantation[J].Spanish Journal of Agricultural Research,2015,13(2):1-14.
[29]王英,陈建能,吴加伟,等.用于机械化栽植的西兰花钵苗力学特性试验[J].农业工程学报,2014,30(24):1-10.Wang Ying,Chen Jianneng,Wu Jiawei,et al.Mechanics property experimentof broccoliseedling oriented to mechanized planting[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2014,30(24):1-10.(in Chinese with English abstract)
[30]刘姣娣,曹卫彬,田东洋,等.基于苗坨力学特性的自动移栽机执行机构参数优化试验[J].农业工程学报,2016,32(16):32-39.Liu Jiaodi,Cao Weibin,Tian Dongyang.et al.Optimization experiment of transplanting actuator parameters based on mechanical property of seedling pot[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2016,32(16):32-39.(in Chinese with English abstract)
[31]胡建平,杨丽红,常航,等.一种自动移栽机取苗控制系统及其控制方法:201610913731.4[P].2017-04-19.
猜你喜欢
现代园艺(2022年7期)2022-11-19
林业科技(2022年5期)2022-10-08
长江科学院院报(2022年5期)2022-05-19
大庆石油地质与开发(2022年2期)2022-04-09
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
中学生数理化·高一版(2020年11期)2020-12-14
深圳大学学报(理工版)(2020年6期)2020-11-11
矿产综合利用(2020年1期)2020-07-24
湖北农业科学(2019年22期)2019-12-23
家庭影院技术(2018年4期)2018-05-09