
基于等效馈线的孤岛微网并联逆变器间环流抑制策略
2018-07-18 01:52张明锐王佳莹宋柏慧
电气技术 2018年7期
张明锐 王佳莹 宋柏慧 韦 莉
(同济大学电子与信息工程学院,上海 201804)
逆变器作为分布式电源与微网的接口设备,承担着系统稳定运行与高质量供电的重要使命,逆变器并联是实现分布式电源并网和系统扩容的主要技术手段。
微网孤岛运行时,分布式电源并网系统可视为多台三相有源逆变器并联运行,并联逆变器间的环流问题不可忽视[1-2]。环流会使电力电子设备过热,降低其安全性能,同时使负载不按比例分配,降低系统传输效率[3]。因此,环流抑制策略的研究对分
国家科技支撑计划(2015BAG19B02)
上海市科委资助项目(13DZ1200403)布式发电和微网的控制具有重要意义。
并联逆变器的线路阻抗和输出电压存在差异,是引起逆变器间环流的重要原因[3-4]。下垂控制是实现多逆变器并联的主要控制策略,受线路阻抗的影响,下垂控制在线路参数不匹配及线路电压降不可忽略时,不仅会增大环流,而且造成功率分配误差[5]。文献[6]采用了Q-ΔU下垂控制,以削弱线路阻抗对功率分配的影响。文献[7]根据负载功率的变化,将输出电压的粗调环节与下垂系数微调相结合,共同调节输出电压。考虑到并联逆变器的设计参数、连线阻抗以及闭环控制器参数存在差异,有学者提出利用虚拟阻抗模拟改善逆变器的输出阻抗特性[8],以减小线路参数对环流的影响。然而,固定成比例的虚拟阻抗在负载波动时控制效果有限。文献[9]利用遗传算法优化虚拟阻抗控制器参数,以提高功率分配精度。文献[10]建立了输出电流dq轴分量与虚拟阻抗的关系,以减弱逆变器等效输出阻抗差异,在逆变器输出阻抗和线路阻抗可忽略时有良好控制效果。
上述方案未考虑虚拟阻抗和传输线路上的电压降,文献[11]通过微网分层控制,利用集中式二级控制器恢复电压幅值,这要求控制器间进行较为复杂的通信,无法发挥下垂控制无需逆变器间通信互连线的优势。
本文提出一种基于等效馈线的并联逆变器间环流抑制策略。通过实时功率计算间接求得等效馈线阻抗,将各逆变器的外接电感、本地负载和传输线路阻抗差异归一化,并在下垂控制的参考电压中补偿等效馈线电压降。基于等效馈线阻抗计算,本文设计的动态虚拟复阻抗可根据并联逆变器阻抗匹配原则动态调节,以适应负载波动及逆变器间线路阻抗差异,提高逆变器输出阻抗的匹配精度。最后,仿真搭建孤岛微网模型(future renewable electric energy delivery and management, FREEDM),验证所提控制策略的环流抑制效果。
1 微网中环流分析
1.1 并联逆变器间环流
逆变器常采用由下垂控制、电压电流双环控制组成的多环控制结构[11-12]。下垂控制中,逆变器的等效输出阻抗包括控制器阻抗、外接电感和传输线路阻抗,不同逆变器的控制器和传输线路阻抗参数存在一定差异,使等效输出阻抗不匹配,进而产生环流。为此,本文采用如图1所示的多环控制结构。图中,uo为逆变器的输出电压;il、io和iL分别为电感电流、逆变器的输出电流、传输线路电流;LG为外接电感;rf、Lf和Cf分别为三相滤波器等效电阻、等效电感和等效电容;ucom为等效馈线电压降补偿值;分别为各控制环的参考信号。
1.2 环流计算
n台逆变器并联系统中,定义第i台逆变器的环流为iHi[3],即

图1 多环控制结构图

式中,ai为第i台逆变器的功率比系数。

Pirated(i=1,2,…,n)为各逆变器额定有功功率。令系统中额定功率最小的逆变器比例系数为 1,则ai≥1。iunit为单位额定电流,定义其大小如式(3)所示,即

由此,可得图2中两台并联逆变器间的环流关系,即
式中,U0∠δ0为网络电压;Ui∠δi为第 i台逆变器的输出电压;ZeqLi=ReqLi+jωLeqLi为归算后的等效馈线阻抗,包括外接电感LGi、传输线阻抗 ZLi以及本地负载Zlocali。

图2 两台逆变器并联
由式(4)可知,流入逆变器的环流大小受等效线路阻抗及输出电压的相角、幅值的影响。理论上,当 U1=U2、δ1=δ2、a1ZeqL1=a2ZeqL2时,便可消除环流。但实际中,外接电感和本地负载的存在增加了系统分析的复杂程度,即使输出阻抗成比例也不能实现功率按比例分配。为此,采用等效馈线的概念,将逆变器外接电感、本地负载和线路参数归算为逆变器的等效馈线阻抗ZeqLi。
2 等效馈线
n台逆变器并联运行时,第i台逆变器通过外接电感向微网内负载提供的有功功率、无功功率见式(5),即

式中,Plocali和 Qlocali分别为第 i台逆变器向本地负载提供的有功功率和无功功率,式(6)给出了第 i台逆变器向公共负载提供的有功功率 PLi和无功功率 QLi,即

式中,ZLi=RLi+jXLi为第i台逆变器的传输线路阻抗。将本地负载和传输线路阻抗归算至等效馈线阻抗Zeqi=Reqi+jXeqi,式(5)可进一步整理,得

为充分发挥下垂控制无需逆变器间互连线通信的优势,将式(6)中公共连接点电压 U0用本地易测量的量表示,即

将式(8)代入式(7),可得

式中,Reqi和Xeqi分别为本地负载和输线路阻抗归算后第i台逆变器的等效线路阻抗。RLi、XLi和外接电感可在逆变器位置确定后得到,PGi和QGi可通过测量图 1中外接电感的 uGi和 iGi计算得出,PLi和 QLi可通过测量 uGi和 iLi计算得出,上述数据均可在本地测量。
最后,对外接电感进行归算,得到等效馈线阻抗 ReqLi和 XeqLi,即

3 改进下垂控制
3.1 常规下垂控制
感性网络中,n台逆变器并联运行时,第i台逆变器的下垂控制方程如式(11)所示,即

式中,mi和 ni为下垂控制系数,firated和 Uirated分别为第i台逆变器额定输出的电压频率和幅值。
系统稳态时,所有逆变器工作于同一频率,只需使所有逆变器在额定功率时的参考频率相同,且下垂系数与其额定功率成反比,即可实现各逆变器按比例输出有功功率。
然而,在Q-U无功下垂控制中,逆变器输出电压受线路阻抗和外接电感影响较大。即使各逆变器输出电压相同,当线路参数不匹配及线路电压降差异不可忽略时,环流也不能完全消除。
3.2 改进下垂控制
文献[6]通过Q-ΔU代替常规Q-U下垂控制,同时结合稳态电压变化归零控制,控制电压变化,改善因逆变器输出线路阻抗的不同造成分布式电源间功率的不合理分配的情况。本文在此基础上,改进常规下垂控制。为减小逆变器输出电压的相角差,在有功功率下垂控制中,增加输出电压的相角偏差反馈;增加输出功率的微分环节,提高逆变器在负载变化时的动态性能;对等效馈线电压降进行补偿,以减小电压偏差,进而抑制环流。
图 3和式(12)给出了线路两端电压相量关系,即
2018年,为了更好地将精准配肥技术推广应用,由玉稼兴合作社牵头,与华南农业大学作物营养与施肥研究室建立了试验站,并与广东东莞一翔液体肥料有限公司在马卜子村建立起乡村小型智能液体配肥站——乡喜精准配肥站,通过引进公司的智能液体自动施肥机,为种植户提供统测、统配、统供、统施的“四统一”精准技术服务。


图3 线路两端电压降向量图
式中,ΔU1=(PR+QX)/U1,为线路上电压降的纵分量,δU1=(PX-QR)/U1,为线路上压降的横分量。通常认为,感性线路两端的电压幅值差主要由电压降落的纵分量决定,则第 i台逆变器下垂控制中参考电压的补偿值,即


图4 多环控制框图
改进后的下垂控制方程见式(14)。其中,ΔUi为电压随时间的变化率,ΔUref为其参考值,二者稳态时均为0。Qiref对应不同ΔUi时无功功率值,Urated为额定参考电压,Δδi为第i台逆变器与所有逆变器输出电压相角和的平均值之差,即Δδi=δi-δiave。系统进入稳态后:

为保证电压稳定,即ΔUi=0,需进行稳态电压变化归零控制。

式中,Qiref的变化与ΔUref和ΔUi之差相关,Khi为第i台逆变器的稳态电压变化归零系数,满足Kh1:Kh2:…:Khn=a1:a2:… : an,以保证各逆变器电压同步变化。当 Q-ΔU下垂控制进入稳态时,ΔUref-ΔUi=0。假定ΔUi归零控制的时间比下垂控制时间长,即进行电压变化归零时下垂控制已达到稳定状态,所有逆变器电压变化归零同步,逆变器输出功率维持稳态值。改进后的下垂控制框图见图4A区。
4 动态虚拟复阻抗
微网下垂控制中,逆变器等效输出阻抗的不匹配会影响功率的分配比例[14-15]。本地负载存在时,常规虚拟阻抗法对功率分配误差的改善效果有限,存在较大环流。本文采用基于等效馈线的动态虚拟复阻抗控制,根据微网实时运行状况,动态调节虚拟阻抗值。
由图4中C区电压电流双环控制框图,得系统闭环传递函数,即


式中,G(s)为电压传递函数,kuP、kuI分别为电压外环比例、积分系数,kiP、kiI分别为电流内环比例、积分系数。
虚拟复阻抗定义为

式中,虚拟电阻RVi及虚拟电感LVi的值由式(21)决定,即

式中,LVrefi为第i台逆变器虚拟电感参考值。虚拟阻抗上的电压为

加入虚拟阻抗后,结合式(16)可得逆变器的等效输出阻抗,即
结合式(9)至式(10)和式(21)可知,各逆变器可根据本地测量的线路电压和电流信息实时计算等效馈线阻抗,动态调节虚拟复阻抗,进而控制等效输出阻抗特性,其控制框图见图 4B区。本文在选取虚拟电感参数时,利用小信号建模对系统进行稳定性分析,并考虑外接电感与虚拟电感的匹配关系,设计LVrefi和LGi与逆变器容量成反比,可提高阻抗匹配精度,改善环流抑制效果。
5 仿真
5.1 仿真模型及参数
微网的种类和形式多样,以美国的FREEDM系统最为典型,各分布式电源、负载以及分布式储能设备经固态变压器(solid state transformer, SST)接入环网,能够实现即插即用[16-17]。FREEDM微网系统结构如图5所示[15],各分布式电源经SST接入微网,并联SST的网侧逆变器间存在环流,如图中iH所示。本文在Matlab/Simulink环境下搭建如图5所示的FREEDM环网仿真模型[18],以验证本文所提策略的有效性。环网的额定电压为10kV,额定频率为50Hz,整个微网的容量为1MVA,各分布式电源均具备20%备用容量,负载为阻感性。设置逆变器1为参考,各逆变器额定功率比为 a1: a2: a3= 1 :1.5:2.5。各逆变器传输线路距离比为l1:l2:l3= 1 :2:1.5,系统参数见表1。
在额定工况、负载突变和负载波动工况下,验证基于等效馈线的改进下垂控制和动态虚拟复阻抗控制对环流的抑制效果。
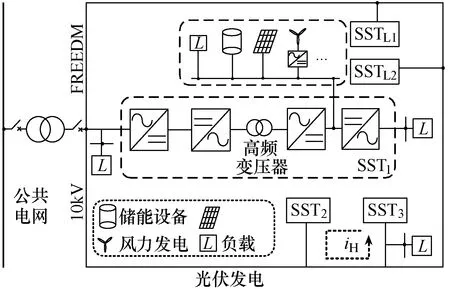
图5 FREEDM微网结构图
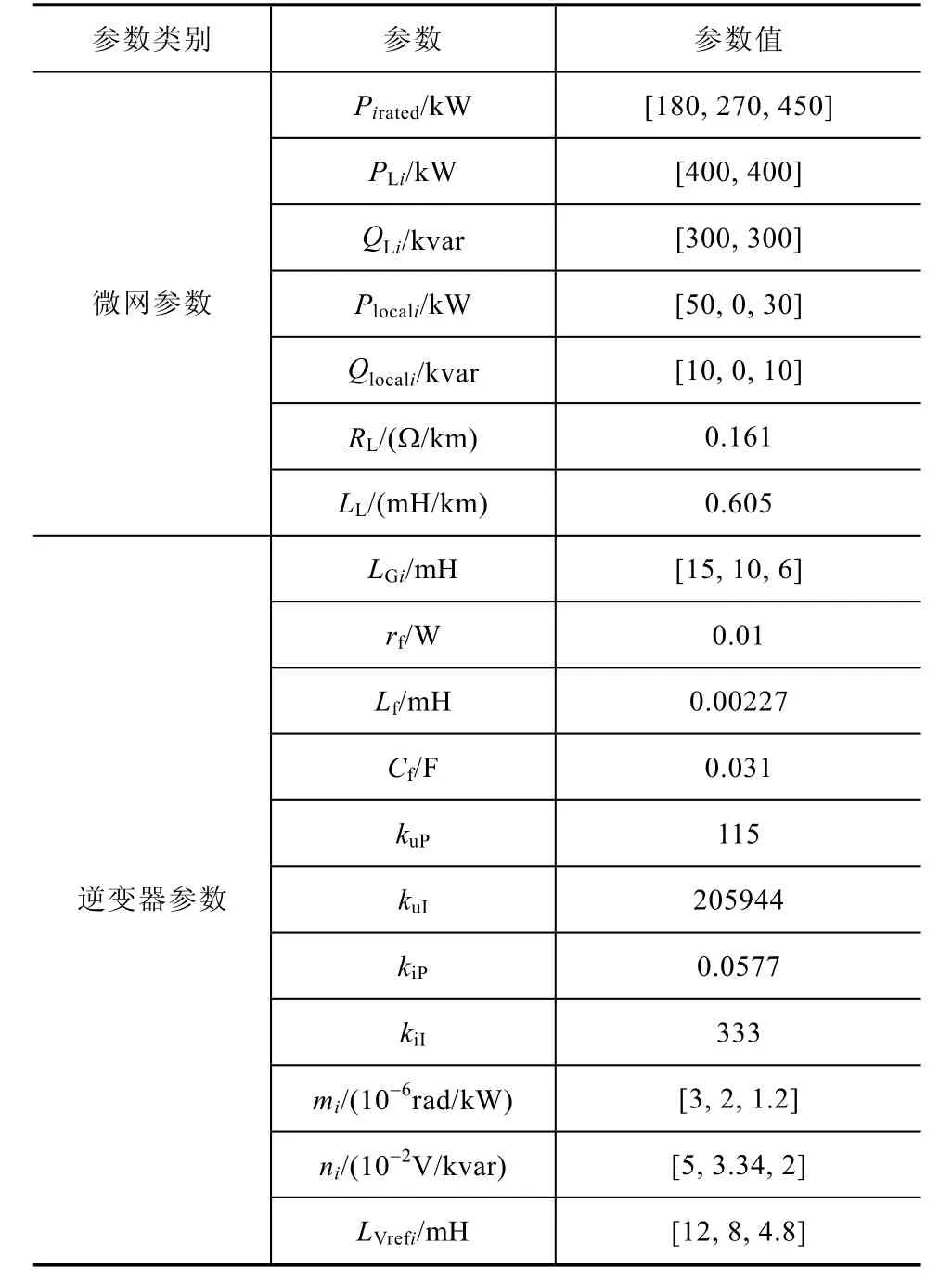
表1 仿真参数
5.2 额定运行工况
1)初始工况:t=1.0s时,系统稳定运行。
2)工况1:t=1.5s时,改进下垂控制代替常规下垂控制。
3)工况2:t=2.0s时,加入动态虚拟复阻抗控制。
仿真结果如图6所示。系统稳定运行时,电压与频率均处于稳定状态。各逆变器的外接电感、本地负载和线路阻抗归算至等效馈线阻抗,虚拟复阻抗值跟随等效馈线阻抗变化。同时,环网额定电压稳定,环流降低且功率分配精度提高。以逆变器 3为例,环流幅值从0.7A左右降至0.4A左右,下降了约 43%,此时逆变器输出功率比例更接近额定比例。
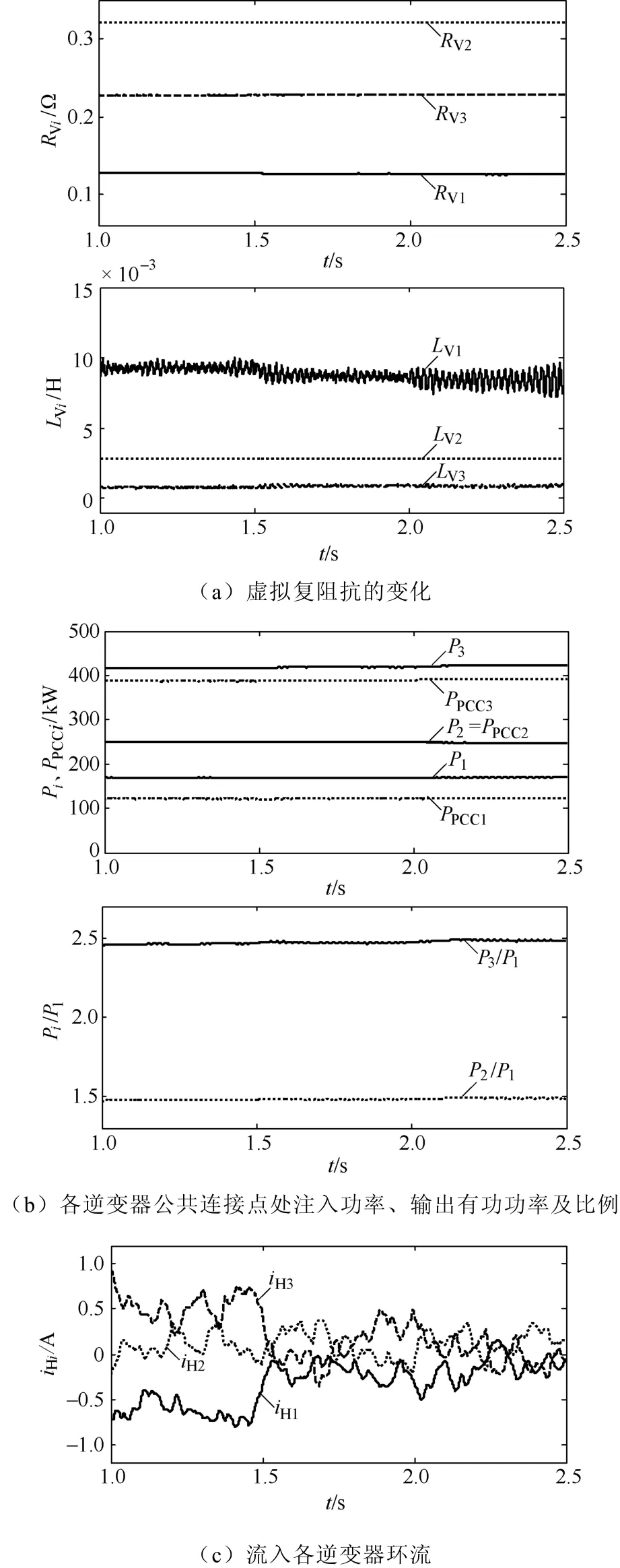
图6 控制策略效果
动态虚拟阻抗的实时调节过程如图6(a)所示。t=2.0s后,由于加入动态虚拟复阻抗,流入各逆变器的环流比例小于1.5%,环流进一步减小。改进下垂控制配合动态虚拟复阻抗控制能够提高功率分配精度,逆变器输出的功率比例基本等于额定比例1:1.5:2.5。
5.3 负载突变
1)初始工况:SSTL1和SSTL2所带负载均为P=400kW,Q=300kvar。t=0.5s时,系统进入稳定运行。
2)工况1:t=1.0s时,负载均切换为P=200kW,Q=150kvar,视在功率降低50%。
3)工况2:t=1.5s时,负载均切换为P=480kW、Q=360kvar,视在功率相较初始工况高20%。
仿真结果如图7所示。
由图7(a)可知,负载容量突变时,逆变器输出电压保持稳定,幅值与额定值几乎相同。输出电流跟随负载容量改变。负荷切换时环网频率有短暂波动,但很快稳定在额定值,保证了网络频率的稳定。动态虚拟复阻抗能够实时根据负载变化进行调节。轻载时,由于输出电流减小,使环流比例有所增大,环流幅值小于 0.5A,环流比例小于 4%;重载时,各逆变器环流比例小于1.5%。负载突变时,环网电压保持稳定,各逆变器输出功率比例基本稳定在1:1.5:2.5的额定比例。


图7 负载突变时控制效果
5.4 负载随机波动
验证负载随机波动时本文所提的控制策略的有效性。系统配置两个功率在 395~405kW 间随机波动的公共负载。如图8所示,负载随机波动时逆变器输出电压维持稳定,电流随负载波动,微网频率保持稳定,本文提出的控制策略在波动时有较好的控制效果,虚拟复阻抗跟随负载波动实时变化,流入各逆变器的环流比例小于3%。

图8 负载波动时控制效果
6 结论
本文针对孤岛微网中逆变器间环流的抑制策略进行研究,通过分析逆变器间环流产生的原因,提出基于等效馈线的下垂控制和动态虚拟复阻抗控制策略。仿真表明,本文采用的逆变器控制策略和环流抑制方法,能有效抑制逆变器间环流。在微网孤岛运行时对负载突变和负载波动有较好的适应能力,并同时保证负载功率的精确分配。动态虚拟复阻抗控制提高了常规虚拟阻抗对线路参数及负载变化的适应性,对逆变器并网运行和微网孤岛运行控制具有参考意义。
猜你喜欢
粮食问题研究(2022年2期)2022-04-25
数学物理学报(2018年2期)2018-05-14
儿童故事画报·智力大王(2016年6期)2016-09-14
现代工业经济和信息化(2016年8期)2016-05-17
通信电源技术(2016年6期)2016-04-20
电测与仪表(2016年24期)2016-04-12
西部广播电视(2015年10期)2016-01-18
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年12期)2014-04-04
