
基于二维虚拟力的陆军地面通信网部署
2018-07-13 06:26段宇江祁志民徐海亚段笑笑
火力与指挥控制 2018年6期
段宇江,祁志民,程 宾,徐海亚,段笑笑
(北方自动控制技术研究所,太原 030006)
0 引言
现代战争常发生在一些复杂未知的区域,这些区域或者环境非常恶劣,人无法自由行动;或者面对陌生的环境,人无法正确辨识周围。一旦遇到这些情况,我军在新区域的通讯网络很难及时迅速地展开部署,可能因此失去了战略先机。故提出搭载有无线基站通信节点的无人车作为地面移动的通信中转站,是在陆军作战领域的一种创新。
无人节点车是一个分布于二维空间、且由具有较强机动能力的地面移动通讯基站[1]。可在指定地区的空域,完成对无人节点车的抛撒,抛撒位置受到高空复杂天气条件的影响,时常出现部分无人节点车“逃逸”目标区域和过于聚集的现象,此时通信效能受到严重影响。为了有效防止“逃逸”与过于聚集问题,本文致力于研究二维移动地面通信网的部署问题,即目标均匀覆盖问题,即通过制定一种约束策略,让二维移动节点能够自组织地形成对目标区域的均匀覆盖,保证目标区域的每一个点都处于通信网络范围之内。
面对这种问题的出现,提出一种基于二维虚拟力的自组织覆盖算法[2]。除去传统虚拟力(Traditional Virtual Force,TVF)(通常指代斥力和引力)之外,引入了中心引力(Central Gravitation,CG)和边界约束力(Border Constraint Force,BCF)两种约束力作用于无人节点车的每一个节点,在防止节点“逃逸”的同时,使相对聚集的节点分散开。引入节点间距离的阈值、边界节点与边界距离的阈值实现对感兴趣区域的均匀化覆盖。
首先列举课题研究的一些假设条件。即使有些前提与实际情况可能不相符合,但基于这些假设所构建的模型能为新型应用提供启发式的理论思维,稍微修改便能应用于具体的实战场景中。假设条件如下:
1)假定节点的通信半径为确定性的、全向的圆形模型。如此,每个节点都会产生相同大小的通信球。
2)每个节点能从它本身或者它的移动载体上所附带的北斗等定位系统上获得自己的绝对坐标信息。
1 二维虚拟力系统
1.1 基本虚拟力算法扩展
传统的虚拟力算法[3]是由势场法[4]和圆盘理论[5]发展而来。它在节点之间同时定义了互相牵制的吸引力和排斥力。
在虚拟力算法部署过程中,为了保持一个紧密的结构,不让移动节点个体“逃离”目标区域,定义每个节点都会吸引周围节点使其不离开自己身边。模拟物理世界,称其为吸引力。在节点互相处于通信范围内的前提下,相对距离越长,节点之间互相靠近的渴望就越强烈,因而产生越大的吸引力。另一方面,为了防止节点之间距离太近而生成不必要的覆盖区域重叠,定义了相互之间的排斥力,从而保证了节点不会过于拥挤密集。排斥力能够使节点避免碰撞,从而符合了经济和安全要求。
事实上,虚拟力机制将个体移动的通信网络看成是包含力和速度的一个虚拟物理系统。为了设计的简单化,通常将某一时刻节点所受合力的方向看成是下一时刻节点运动的物理方向。最终,虚拟力机制会使得节点群变得相当稳定和紧凑。当某节点因为某些特殊原因失效时,由于局部的受力不均,剩下的节点会自动移动填补空当,直到一个新的收敛状态。
在二维空间中,每一个节点对应着2个同心圆。首先,每个节点能够通过无线基站与一定距离内的邻居节点直接通信,该距离定义为通信半径Rc,对应的通信区域定义为通信圆。其次,称之为平衡圆,以Rb(0≤Rb≤Rc)为半径,其中Rb为吸引力和排斥力的分界。每个通信节点对平衡圆以外但是通信圆以内的邻居节点,仅产生引力作用。
虚拟力规则提炼如下:节点之间的距离越近(远),彼此产生的排斥力(吸引力)越大。即,距离平衡球体表面的距离越远,受到虚拟力场的影响越大。当节点正好落于彼此双方平衡球体表面时(前提是网络节点同构),斥力与引力都为0。
1.2 算法演进
首先定义基于虚拟力的节点模型。
定义1 节点模型可以用一个六元组<s,R,v,ns,F,f > 表示。其中 s(x,y)表示节点的坐标。R={Rc,Rb}为节点自身的半径属性集,即产生的两个同心圆的半径。v表示节点在二维空间中的运动速度。f为二值型变量,1表示节点处于目标区域之内,反之则为-1。如果两个节点之间距离小于Rc,称为邻居节点。Js表示节点s的邻居节点集合,计算公式为

F={TV}为节点s产生的力场,后面会给出力的详细说明与定义。
定义2 对于二维空间中任意两个处于通信范围内的通信节点s1(x1,y1)和s2(x2,y2),欧氏距离为

令s1对s2施加的传统虚拟力(Traditional Virtu-的方向由虚拟力的类型决定,大小由式(3)计算得到:

其中,k表示放大指数,用以放大与平衡点距离的影响。α用来确保方程为增函数,在此给α赋值为10。式(3)计算所得虚拟力使得相邻节点朝其平衡圆圆周移动。每个通信节点通过综合计算二维空间中与邻近节点的位置关系,自动调整自己的当前位置,从而产生一个高耦合网络结构。通过对Rb的调整,可以让整个部署结果变得相对松散或紧凑。
传统的虚拟力算法通常是假设节点群初始分布较为密集,通过扩散使得网络均匀部署开来。然而实际应用中,节点通常随机散布在二维空间里并通过移动以寻找目标区域。由此基础上实现的传统虚拟力算法通常会造成网络分割或者覆盖漏洞,需要进一步地调整让密集区域更松散或者稀疏区域更紧凑。传统虚拟力算法在此情况下表现得并不好,因为节点之间的地位是对等的,且先验知识有限,它们并不知道其他个体区域的覆盖密度,所以只能通过局部而非全局信息进行决策。
整体协调的缺乏带来两个潜在问题。首先,目标区域可能不会被很好地覆盖。随机抛撒和无外界条件干预的自适应部署方式,可能会产生对目标或大或小的偏移量。其次,即使前面的问题得到解决,节点最终仍有可能部署不均匀。极端情况下,即使网络整体在虚拟力的作用下处于平衡状态,局部仍有可能出现多处网络分割。除了传统虚拟力TVF,本章定义了中心引力CG,使得部署过程更加合理和有效。
定义3 CG定义为目标区域对节点群的正面吸引力,具体可参照传统势场法,比如欧氏距离相关函数,将CG定义为与TVF相同量级常量。
二维空间中通信节点随机运动以搜索目标区域。一旦目标确认,通信节点将朝着目标产生的CG方向运动,同时还会将目标的坐标位置信息通知给其他同伴。如此,节点群通过CG被吸引到目标区域中来。
另一方面,分布式部署策略为非中心控制型算法。由于个体知识的限制,仅由TV形成的紧耦合结构很有可能包含密度不均匀的区域。然而这种均匀分布是有较大实际意义的。有秩序的编队能够充分利用每一个节点的有效覆盖面积,从而使得整体参与的移动节点数目大大降低。
部署过程中,每个节点不仅仅只作为一个产生TVF的势场,同时还通过EF的方式,作为一个协调器去平衡以自我为中心的局部区域。为了简化,采用欧式距离作为计算方式。每个节点计算与其所有邻居节点的平均距离,然后将该值与邻居个体加以比较。如果均值大于个体值,则产生排斥力;反之则产生吸引力。
定义4 以节点i为参考,则边界对邻居节点i产生的边界约束力表示为该力的大小为

其中,Rb表示节点i到其所有邻居节点距离的平均值。min{d(si,B)}表示节点 i与部署区域边界的最短距离。参数Rth作为引力和斥力分界的边界距离阈值。区域边界对距离区域边界Rth范围内的邻居节点仅产生斥力作用,对[Rth,2Rth]以内的邻居节点,仅产生引力作用。则式(4)中参数α和k则与式(2)中相同。

其中Ji表示节点i的邻居节点集合。
每一个时间步长,根据节点与目标区域之间的距离关系计算CG,根据节点与边界之间的距离关系计算BCF,根据节点与其邻居节点的关系计算TVF,然后将所有虚拟力矢量相加得到合力。如此,各节点在合力的驱使下调整自身位置一直到自身受力平衡为止,当各节点达到受力平衡,也意味着整个网络处于稳定拓扑状态,进而对所覆盖的目标区域执行感知任务。
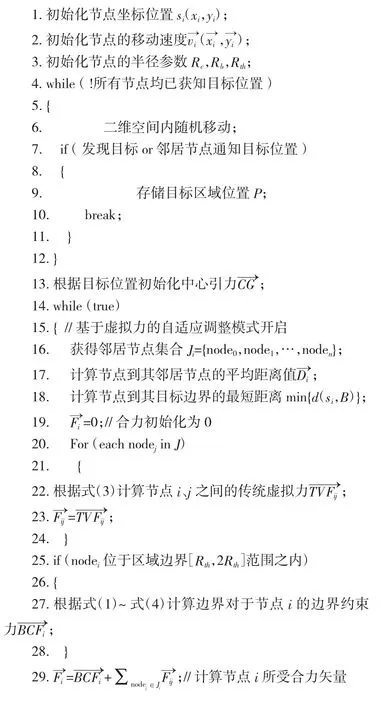
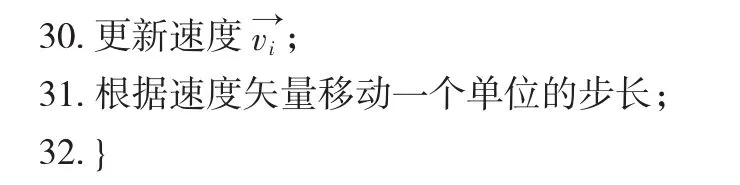
2 算法描述
基于虚拟力的二维均匀部署算法作为分布式算法,其各样本节点并发执行相同的策略,位置调整同步进行。取其中任一节点i的位置更新算法描述如下所示。
3 实验验证
本文所做基于虚拟力算法的仿真实验均在二维场景下进行,通过覆盖率、逃逸率标准去衡量算法的有效性。覆盖率表示的是目标区域被网络覆盖的百分比,逃逸率表示“逃”出部署范围的节点车数量,与传统部署方式形成对比。在通信网络问题中,覆盖率总是首要问题之一,因为用更少的节点得到更大的覆盖面积是非常有意义的。
3.1 实验设置
在空旷场地内选取一片实验区域,实验通信节点车通过雷达信号完成测距。50 m×50 m的正方形区域内,随机地投放36辆该模拟通信节点车,通信半径为5 m,依据设计算法得出合力矢量,并根据矢量方向运动。每分钟记录一次覆盖范围以及部署范围外的节点车数量。
3.2 覆盖率
实验中,某一区域点处于至少一个及以上通信节点车通信范围之内,则认为网络针对该区域实现了有效覆盖。采用传统的覆盖方法来计算网络覆盖率。

其中,Si为通信范围重叠区域面积,S为试验区域面积,g为覆盖率。
图1给出了在实验过程中,每分钟记录的区域覆盖率变化情况。实验显示,添加了中心引力、边界约束力虚拟约束条件的虚拟力算法可以达到对R区域的全覆盖需求。
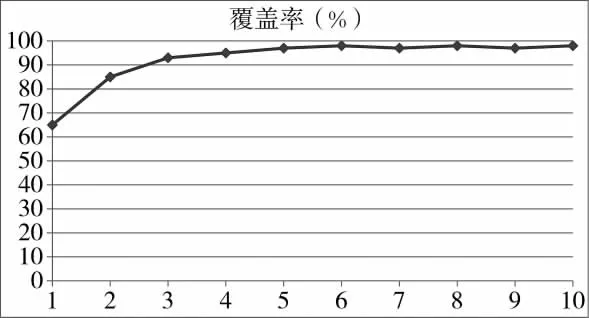
图1 虚拟力部署方式覆盖率变化表
3.3 逃逸率
逃逸率是面对本文所研究的基于改进后的二维虚拟力通信网络部署方案,提出的一个评价指标,认定当部署过程中出现节点车不在规定区域内的情况,就出现了“逃逸”。虚拟力改进前后的部署过程逃逸率如表1所示。根据表中内容可以得出,增加了中心引力和边界约束力后,节点车的“逃逸”情况得到了明显的改善。

表1 虚拟力改进前后部署过程逃逸率
4 结论
通信节点车从随机分布到完成部署过程中,防止通信节点车的“逃逸”和过于聚集现象的发生,最终实现对二维目标区域的均匀化覆盖是通信节点车投入实战的必要前提和条件。为了很好地解决“逃逸”和过于聚集问题,考虑到节点可在二维空间中自由移动和虚拟力算法的分布式属性,本文提出并实现了基于二维虚拟力的自组织覆盖算法,对传统虚拟力算法进行了有益扩展,引入了中心引力、边界约束力两种虚拟约束力,以自适应的方式部署在目标区域中。实验表明,场景中部署是合理有效的。
猜你喜欢
故事作文·高年级(2022年2期)2022-02-24
纺织科学研究(2021年7期)2021-08-14
当代陕西(2020年15期)2021-01-07
华人时刊(2020年13期)2020-09-25
现代装饰(2020年4期)2020-05-20
小猕猴智力画刊(2017年6期)2017-07-03
儿童故事画报·发现号趣味百科(2016年6期)2016-08-19
山东青年(2016年1期)2016-02-28
第二课堂(课外活动版)(2015年4期)2015-10-21
当代修辞学(2014年3期)2014-01-21
