
基于外辐射源的AIEKF定位算法*
2018-07-13 06:26吕政君许小丰
火力与指挥控制 2018年6期
关 欣,吕政君,许小丰
(1.海军航空大学,山东 烟台 264001;2.通信信息控制和安全技术重点实验室,浙江 嘉兴 314033)
0 引言
外辐射源定位技术具有抗有源定向干扰和反辐射导弹的能力,不仅能够提高战场环境下的生存能力,还可有效发挥侦测、预警等作用,因此,具有非常好的应用前景[1-3]。外辐射源定位系统的观测量主要有方向角、直达波和目标回波的时间差、多普勒频移和方向角变化率,利用不同的测量信息,可得到与测量信息相对应的定位算法。
基于方向角和多普勒频移的外辐射源单站定位系统中,其观测量与目标状态参数具有非线性的函数关系,而EKF是用近似的方法来研究非线性问题的有效方法之一[4]。但由于对非线性模型的线性化处理,所带来的线性化误差会导致预测误差增大,从而对目标状态估计的误差将会逐渐变大,以至于定位结果不理想,甚至出现滤波发散的情况[5]。
为此,对EKF定位算法进行改进,当获得一组观测量时,多次运用EKF滤波公式进行迭代运算,使之不断接近目标实际状态值,当自适应参数达到设定的门限值时,停止迭代运算,此时达到状态估计的最佳,这就是AIEKF定位算法的基本思想。利用此方法,在二维平面内对空中运动目标进行定位跟踪,通过计算机仿真实验,验证了改进算法的定位跟踪性能,并对EKF算法和IEKF算法进行了比较。
1 基本模型
以接收站为坐标原点,建立一个二维观测模型坐标系。单站外辐射源定位模型中接收站、目标和外辐射源之间的位置关系,如图1所示。其中,接收站位置坐标为,运动目标k时刻位置坐标为,速度为,外辐射源位于x轴上,与接收站之间的距离为L。假设接收站可以获得运动目标的方向角θk,也可获得目标与接收站因相对运动而产生的多普勒频移fdk。
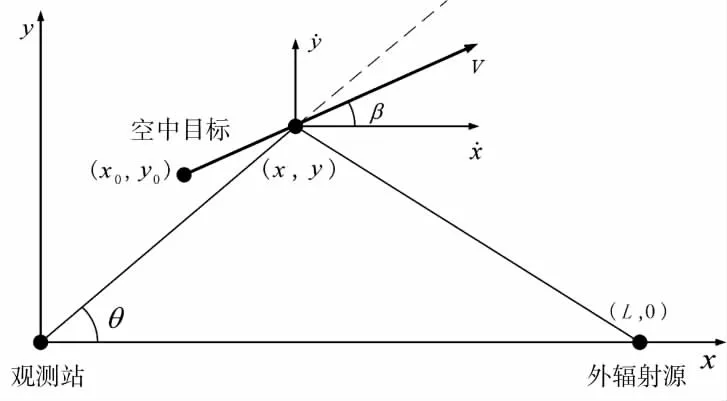
图1 单站外辐射源定位位置关系示意图
首先,接收站获得k时刻目标的方向角θk、多普勒频移则可以建立如式(1),式(2)的观测方程
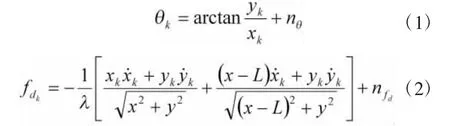
式中,nθ,nfd分别为方向角和多普勒频移的测量噪声,它们都是统计独立的高斯白噪声,为外辐射源信号波长。
由上面两式可以看出,观测方程均为非线性方程,单站单次测量值无法直接求取目标的状态值,实现即时定位。这就需要积累多次的测量值,通过迭代算法求解目标状态值。
将上述观测方程写成矩阵的形式:

假设空中目标在二维坐标系下作匀速直线运动,系统过程噪声为零,则目标在k时刻的状态方程可以表示为:

2 算法分析
2.1 EKF算法
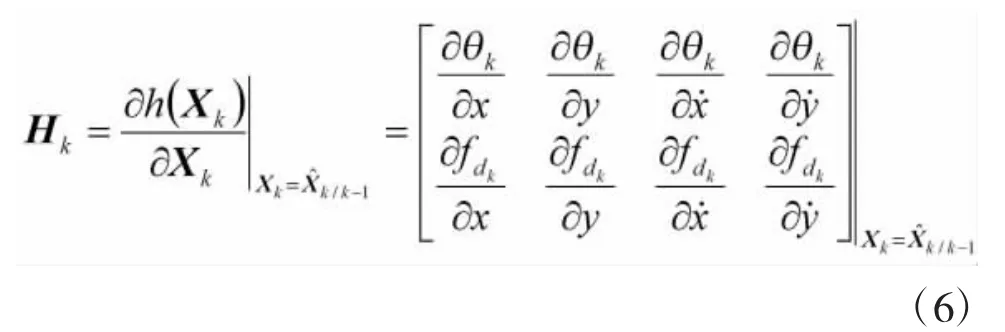
对于本文研究的定位模型系统,可通过式(3)、式(4)两个方程加以描述。利用EKF算法求解前,首先对观测方程进行线性化,方法是将一阶Taylor展开,并忽略高次项得:

Hk为线性化的Jacobi矩阵,
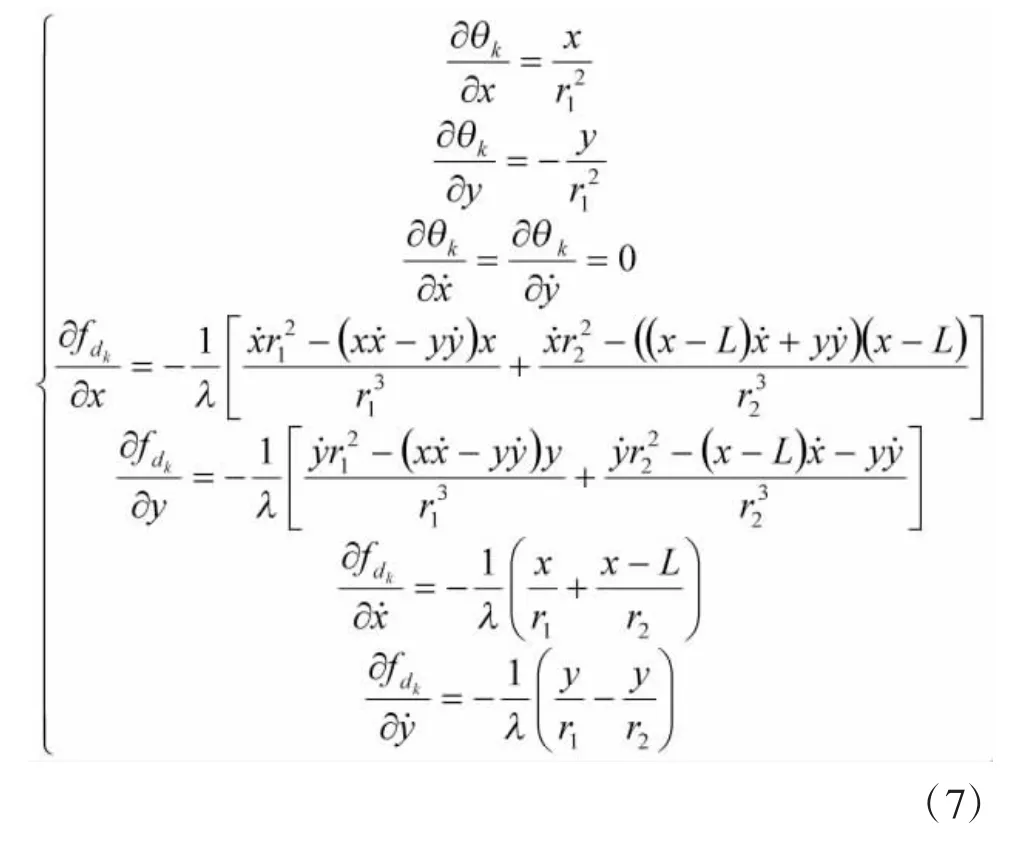
其中:
得到状态转移矩阵A和Jacobi矩阵Hk以后,可以利用EKF算法进行滤波计算,具体递推算法如下:
一步预测:

预测误差协方差矩阵:

滤波增益矩阵:

状态更新方程:

滤波误差协方差矩阵:

2.2 AIEKF算法
IEKF算法的基本思想是,当获得一组观测量Zk时,多次运用 EKF 公式,使式(10)~ 式(12)迭代循环运算,反复求取状态估计值,使之与观测量逐渐吻合,从而使状态估计最优化。具体算法步骤如下:
1)获得一组观测量 Zk,利用式(8)、式(9)进行一次运算,得到一步预测状态估计和预测协方差矩阵Pk/k-1。

其中,K为观测次数,N为迭代次数,相应的EKF算法的总运算量为:

相比于EKF算法,IEKF算法增加的运算量为:

由此可知,在观测次数K一定时,随着迭代次数N的增加,IEKF算法的运算量线性增加,增大了算法复杂度。为此引入参变量α,在每一次观测循环时,自适应控制迭代次数N,当参变量α达到设定门限值α0时,停止迭代运算,进行下一次观测,这就是AIEKF算法的基本思想,算法的流程框图如图2所示。
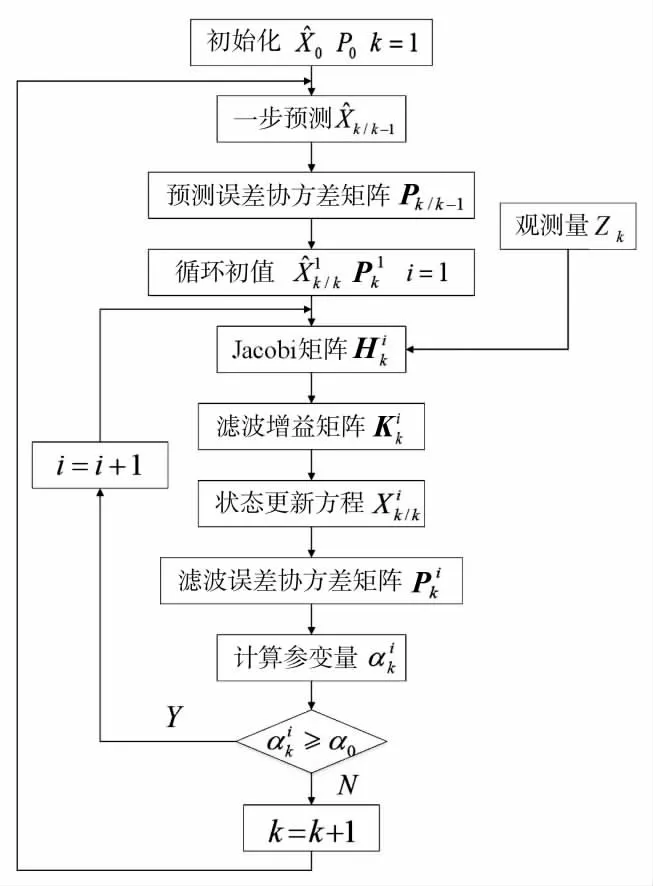
图2 AIEKF算法流程框图
AIEKF算法的每一次迭代运算,都使状态估计值与目标实际状态值渐趋吻合,因此,参变量α应与状态估计偏差正相关。但由于在实际跟踪情况下,目标状态值无法获得,故转为求解状态估计值与观测量之间的相对误差,为此将状态估计值转化为方向角和多普勒频移量,根据式(1)和式(2),推导出式(16)。

得到参变量α代数式如下:
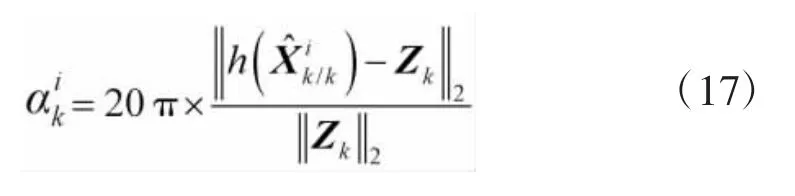

表1 相对定位误差与门限值之间的对应关系
3 仿真实验
为了验证本文AIEKF算法的有效性,本节对该算法进行了仿真试验。试验中,目标跟踪定位模型与第1节所描述的模型相同,地面观测站的坐标为(0,0)km,观测周期T为1 s,观测次数为500次。外辐射源的坐标为(150,0)km,空中目标的初始位置为(100,120)km,空中目标以0.2 km/s的速度远离观测站作匀速直线运动,与X轴的夹角β=30°。方向角的测量噪声是均值为0、方差的高斯白噪声;多普勒频移是均值为0、方差的高斯白噪声。初始协方差矩阵取,参变量门限值取α0=0.25。在上述条件下做500次蒙特卡洛实验,采用均方根误差作为目标跟踪和速度估计的评价指标,定义如下:
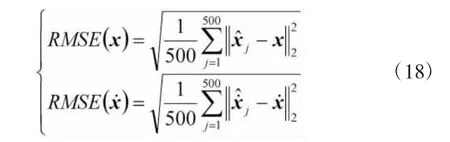
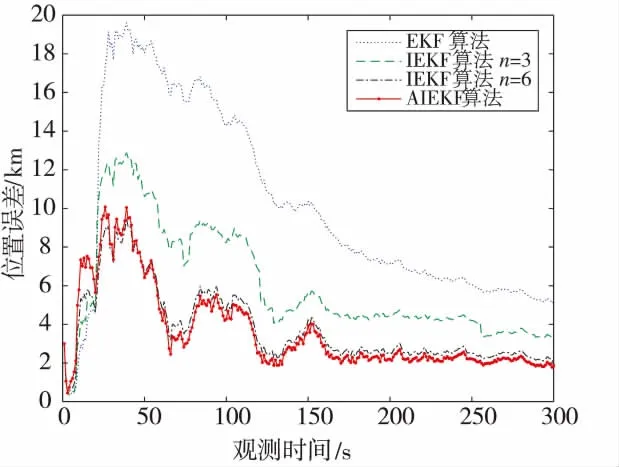
图3 跟踪位置误差曲线
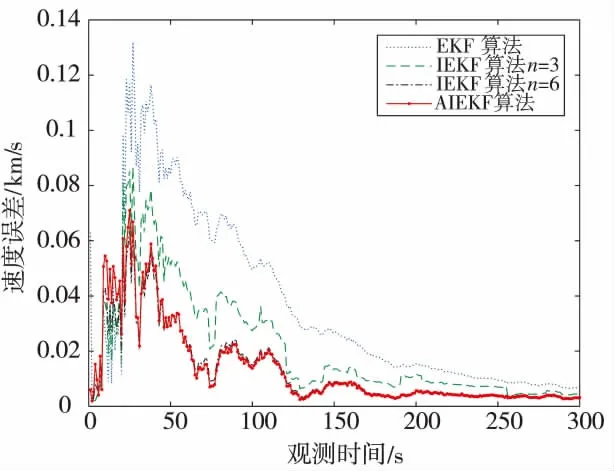
图4 跟踪速度误差曲线
图3、图4分别给出了进行500次蒙特卡洛实验后,对目标位置和速度估计的误差曲线。可以直观地看出AIEKF算法和IEKF算法的跟踪性能明显高于EKF算法,两者都通过多次的迭代运算,改善雅克比矩阵,使估计值与观测值越来越吻合,对于目标的状态估计更准确,收敛速度更快。而AIEKF算法在位置和速度上的跟踪精度与IEKF算法迭代6次的精度几乎相同,且更优于迭代3次的跟踪精度。
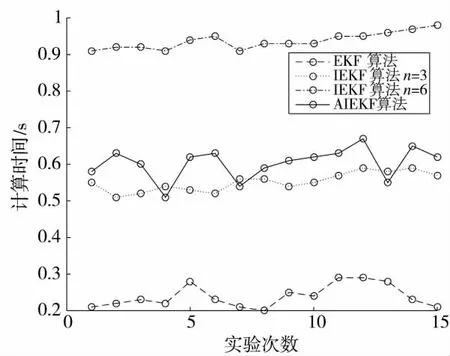
图5 算法运行时间对比图
在2.2节中,已经讨论了IEKF算法和EKF算法的运算量,但由于AIEKF算法在每次观测时的迭代次数都不一样,无法准确统计其运算量。因此,为了更好地比较各算法之间的运算复杂度,对各个算法的运行时间进行了统计,如图5所示。可知EKF算法的运行时间最短,相比于迭代3次的IEKF算法,迭代6次所需时间大幅增加,而AIEKF算法的运行时间与迭代3次的IEKF算法基本相当。
根据以上仿真结果,可以看出AIEKF算法在跟踪精度上远优于EKF算法,在保持相同的跟踪精度的情况下,相比于IEKF算法,AIEKF算法极大地降低运算复杂度。因此,从跟踪性能和运算复杂度两方面综合来看,AIEKF算法要远优于IEKF算法和EKF算法。
4 结论
本文研究了单站外辐射源对空中运动目标的跟踪定位问题,为减小传统EKF滤波算法线性化过程中引入的系统误差,提出了一种通过自适应控制迭代次数求取状态估计值的AIEKF算法。与EKF算法和IEKF算法相比,AIEKF算法既提高了对目标的跟踪精度,又降低了算法的运算复杂度,因此,该算法在目标跟踪定位中有着良好的应用前景。
猜你喜欢
舰船电子工程(2022年7期)2022-09-06
煤气与热力(2022年4期)2022-05-23
煤气与热力(2022年4期)2022-05-23
国际太空(2021年11期)2022-01-19
煤气与热力(2021年9期)2021-11-06
煤气与热力(2021年5期)2021-07-22
北京航空航天大学学报(2020年10期)2020-11-14
舰船电子对抗(2020年1期)2020-04-27
中国化妆品(2017年12期)2017-06-27
太空探索(2016年7期)2016-07-10
