基于时延波束形成与短时倒谱算法的目标通过特性分析
2018-07-10 07:16:10杨普陈励军
声学与电子工程 2018年2期
杨普 陈励军
(东南大学信息科学与工程学院,南京,210096)
在舰船目标分类识别技术的研究中,舰船辐射噪声的特征分析一直是最重要的研究课题之一,所取特征的有效与否很大程度上决定了目标分类识别的成败。其中辐射噪声的通过特性是典型的非平稳过程,在舰船接近和离开接收点的过程中,存在有明显的时域幅度起伏。在测量条件下,舰船辐射噪声级、谱特性等参数是舰船相对于测量水听器位置(与测量水听器之间的距离)的函数,称为纵向通过特性(简称通过特性)。舰船辐射噪声通过特性包括总声级通过特性、1/3 oct频带级通过特性和线谱通过特性。总声级通过特性曲线的最大值对应于舰船总声级最大的位置,而1/3 oct频带声压级和线谱通过特性则反映不同频率的噪声级和被测舰船不同噪声源位置的关系[1-2]。
多篇文献提出了基于三维几何模型的舰船通过特性仿真[3-7],包括近距离情况下模拟不同部位频率特性的三亮点模型[5-8]。文献[8]根据期望过零率与功率谱之间的关系对舰船通过特性进行了过零点数分析,对比了不同种类舰船实测辐射噪声通过特性过零率随时间的变化,达到了高识别率。文献[2]对近场球面波条件下的阵聚焦波束形成进行了理论分析,提出了基于阵聚焦通过特性的方法。
本文研究在水下布放双密排圆柱阵测量舰船辐射噪声,用时延波束形成法对接收信号进行波束形成。基于实测辐射噪声数据,对波束输出信号作时间历程图并进行窄带滤波,分析各线谱通过特性并进行仿真验证。同时运用倒谱法作信号的倒谱历程图,分离出信道的传输特性,提取其多径结构并进行仿真验证。
1 试验概况与波束形成处理结果
实船辐射噪声测量海试于2016年9月在海南省三亚市附近海域展开。试验区域水深约100 m。试验中使用两艘不同型号的试验船作为产生辐射噪声的目标船。测量所使用的阵列悬挂在水下25 m深处。3次航程,每次时长7~9 min。其中两次甲船分别保持6 kn与4 kn的速度匀速直线航行,航迹与测量基阵水平距离距约为200 m。另有一次为乙船沿一圆弧绕基阵航行,速度约为7 kn。此外,在无目标船时对环境噪声进行采集。
阵列采用双密排圆柱阵,共4层双圆环。内环半径0.38 m,每层等间隔摆放6个水听器阵元,外环半径0.76 m,每层等间隔摆放12个阵元,相邻层间距0.38 m。阵元总数为72个(图1)。
在目标船航行过程中对其辐射噪声数据进行连续采集与记录,采样频率为100 kHz。对甲船在不同航速下(4 kn和6 kn)两组实测辐射噪声分别作波束形成并对输出信号作波形图(图2、3)和时频历程图(图6、7)。波束形成中水平扫描间隔2°,垂直扫描间隔1°,每0.1 s(72×10 000个采样点)作一次处理,并分别作两组数据的水平方位角-时间图像(图 4、5)。图像显示,除了少部分原始数据异常外,方位角均为连续变化。同时目标近似为匀速直线航行,方位角图像曲线与反正切函数曲线接近。曲线拐点处(方位角变化最快处)与对应的波形图中幅度最大处的时刻相吻合,表明了波束跟踪的有效性。
根据与另外测得的环境噪声数据对比,辐射噪声的能量主要集中在1 000~1 500 Hz。从波束输出信号的时频历程图可以看出,甲船4 kn和6 kn航速的辐射噪声均在500~1 000 Hz范围内有多个持续稳定的线谱分量。而连续谱分量则随目标位置的变化而有所变化,在正横位置附近时幅度达到最大。为了较准确地获取线谱分量的时域通过特性,需要对输出信号进行相应中心频率的窄带滤波。

图1 圆柱阵空间排列示意图

图2 甲船6 kn航速辐射噪声波束输出信号波形图
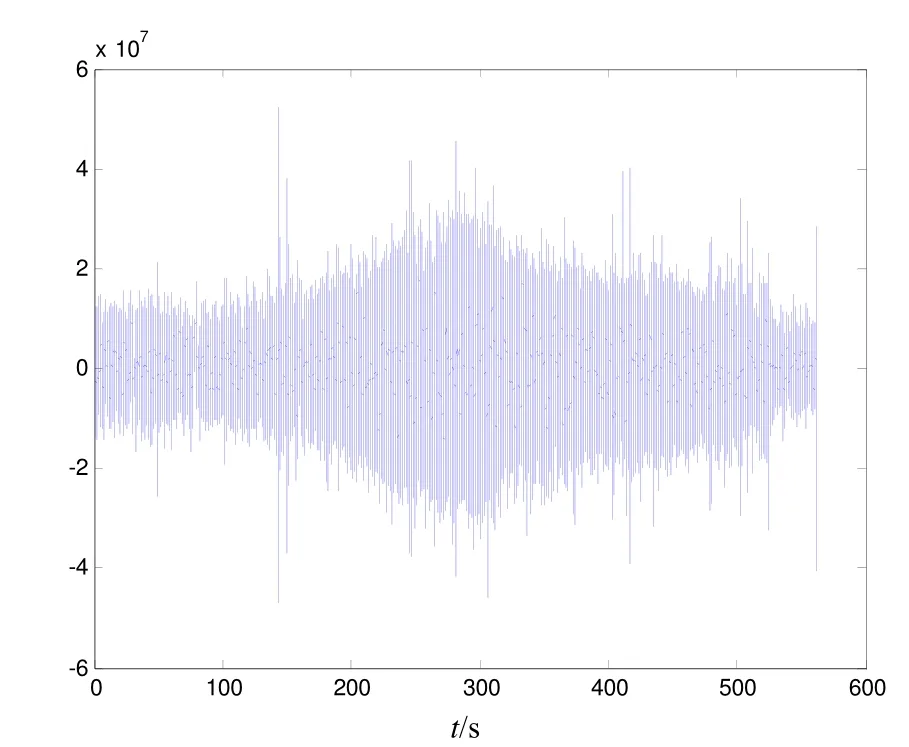
图3 甲船4 kn航速辐射噪声波束输出信号波形图

图4 甲船6 kn航速波束跟踪方位角图像
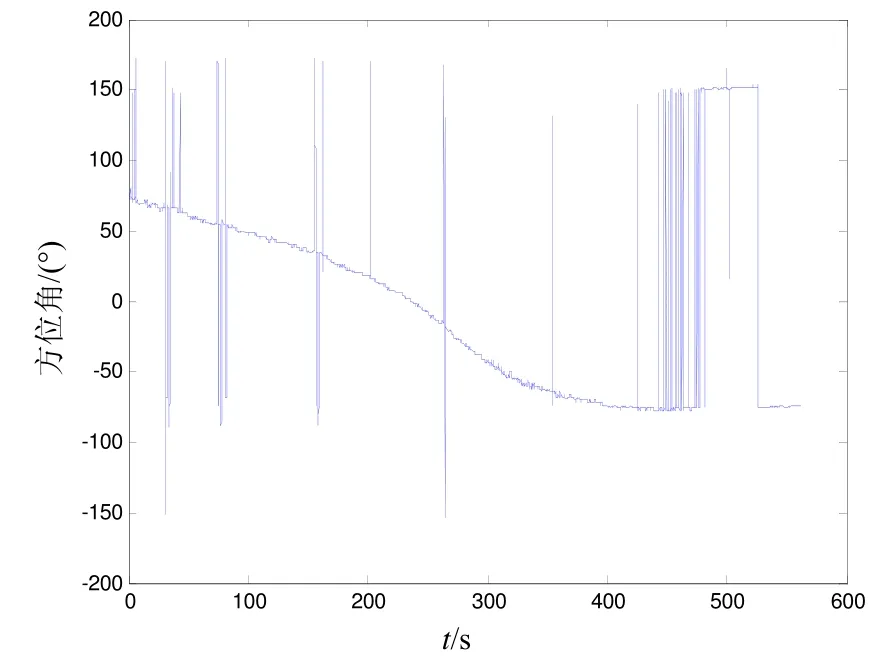
图5 甲船4 kn航速波束跟踪方位角图像
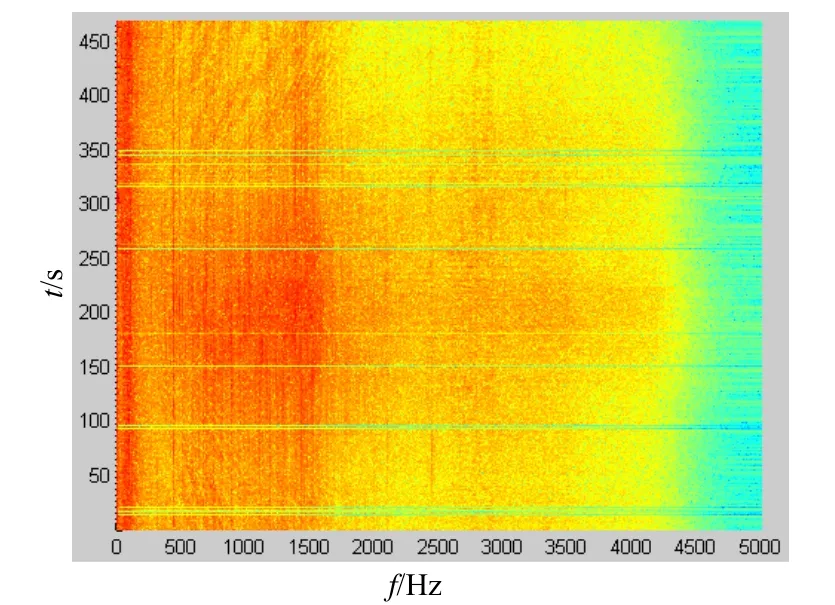
图6 甲船6 kn辐射噪声波束输出信号时频历程图

图7 甲船4 kn辐射噪声波束输出信号时频历程图
2 单线谱通过特性分析
2.1 运用窄带滤波获得线谱分量的通过特性
运用短时Fourier变换(STFT)可以获得信号的时频历程图(图 6、7)。通过信号的时频历程图可以清楚地看出其线谱的分布。为了获得某一线谱的变化情况,对输出信号进行相应中心频率的窄带滤波。对滤波后的信号计算其短时平均功率,作其功率-时间图像,即得到该线谱的通过特性(图8、9)。从图中可以看出,随着目标的经过,各线谱的通过特性均表现出接收功率先增大后减小的起伏过程。此外,不同频率的线谱达到最大功率的时刻略有不同。
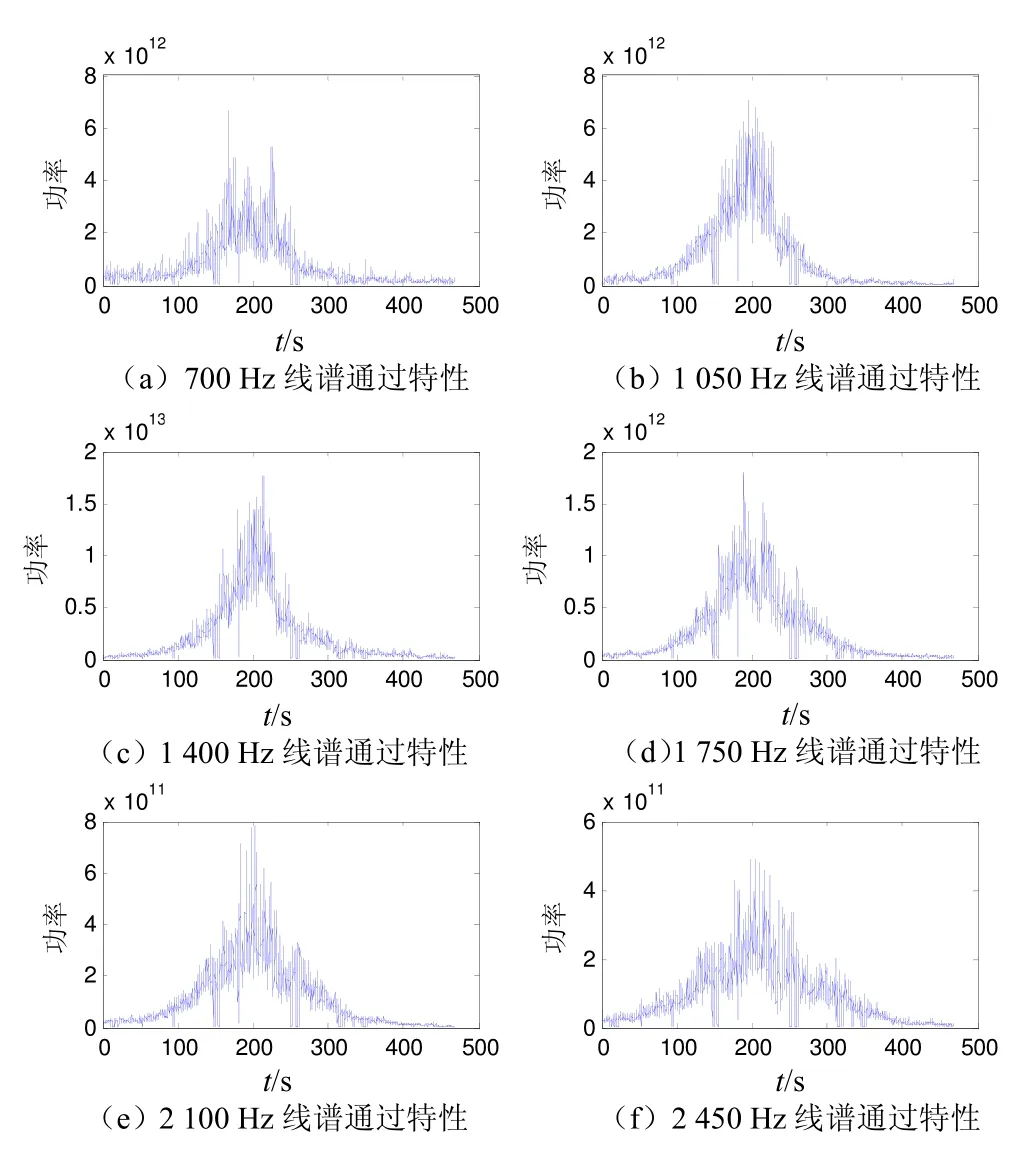
图8 甲船6 kn辐射噪声部分线谱通过特性
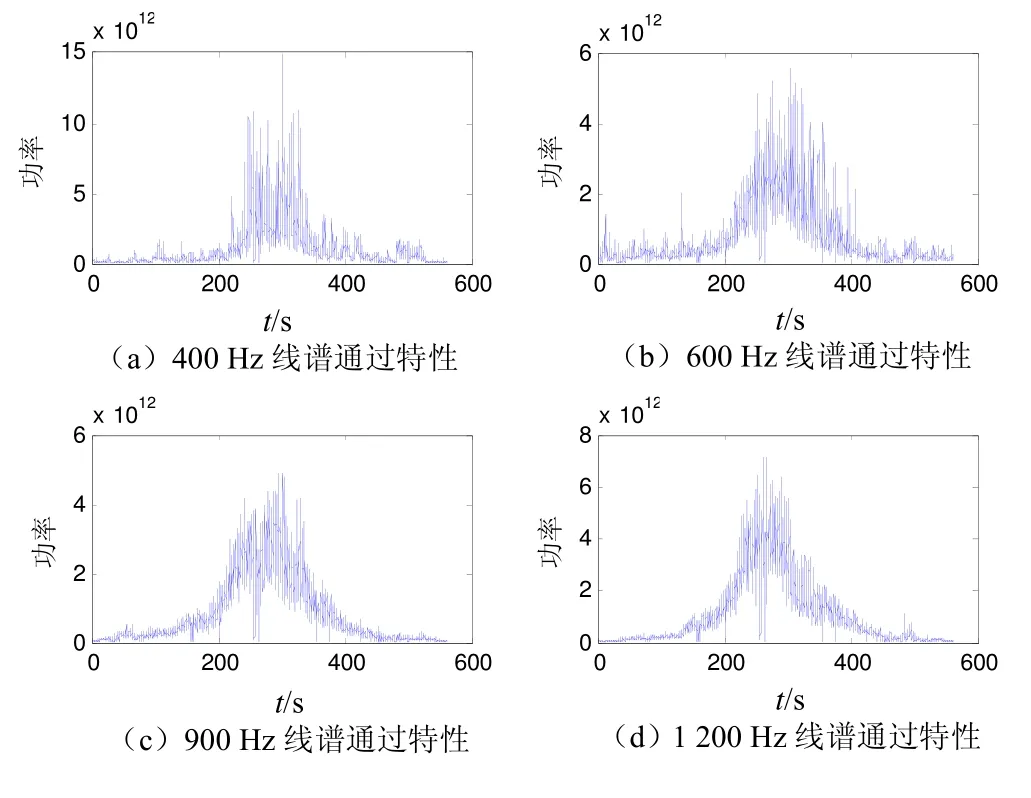
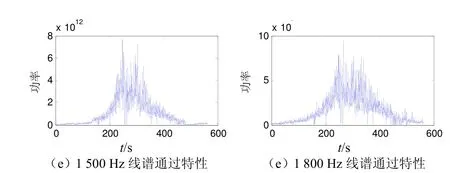
图9 甲船4 kn辐射噪声部分线谱通过特性
目标处于正横位置附近时各线谱功率达到最大值。而将各线谱的通过特性图像在正横位置附近局部放大后可以看出(图 10、11),多个线谱功率存在明显且有规律的波动现象。

图10 甲船6 kn辐射噪声部分线谱通过特性(局部)
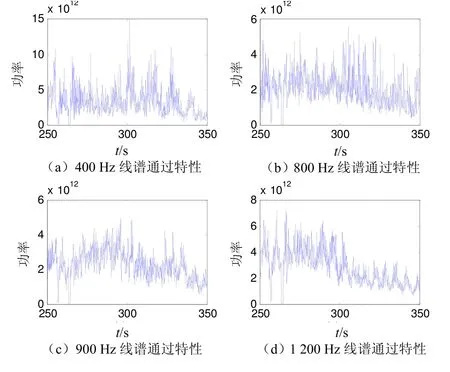

图11 甲船4节辐射噪声部分线谱通过特性(局部)
2.2 仿真验证
由于在距离接收阵最近的正横位置附近最明显,初步猜想引起图 10、11现象的原因为多径干涉,即同频叠加的相位差随着距离而变化,导致叠加后的信号幅度一同变化。
通过仿真来验证该波动是否为多径干涉所引起。模型采用图 12所示的三维直角坐标系下的几何模型[1]。目标与观测点的距离为仿真参数设定尽可能接近实际试验情况:横距d=200 m,目标范围在正横位置前后100 s,航行速度v分别取3 m/s和2 m/s两个值,水深H=100 m,水听器位于水下,h=20 m,海底反射系数0.5,声源信号为正弦波,频率分别取1 200、1 400、1 600、1 800 Hz。为简便起见,假定只有单水听器,并仅考虑直达波和海底反射。各声源频率、航速下的接收信号如图13所示。

图12 通过特性仿真模型示意图
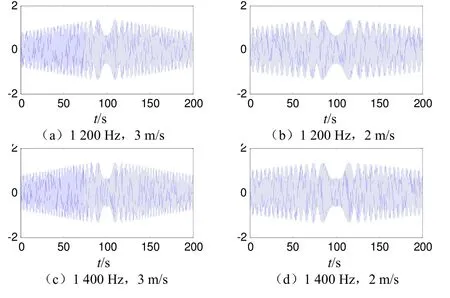
图13 不同信号频率和航速下的仿真接收信号
仿真结果表明,干涉所引起的波动与目标位置、速度以及信号频率都有关。然而实测结果显示不同航速、中心频率的信号波动周期大致相同,均为6 s左右,且基本不随时间变化。由此排除多径干涉这一可能性。该特征有可能是目标信号的固有特征。
3 倒谱分析
3.1 倒谱法的原理
倒谱技术在许多实际领域都有广泛应用,是信号处理和信号检测的一种经典方法。利用倒谱的解卷积性质可以分开声源的信号与信道的信道函数,这样就可以方便地反映多途信道中的时延结构。我们将倒谱图按时间排成倒谱瀑布图就可以看到信道变化的情况,也可以推断声源的位置变化情况[9]。

根据反射路径的时延又可以表示为

设直达波0()x n的z变换为0()Xz,则 ()s n的z变换为


对功率谱取对数,即

将最后一个对数项按幂级数展开并只保留一次项,可以得出
由上式可见, ()s n的倒谱将在和处出现峰值,分别代表反射波与直达波及两条反射波间的相对时延。
3.2 运用短时倒谱法分析信号特性及信道的时变特性
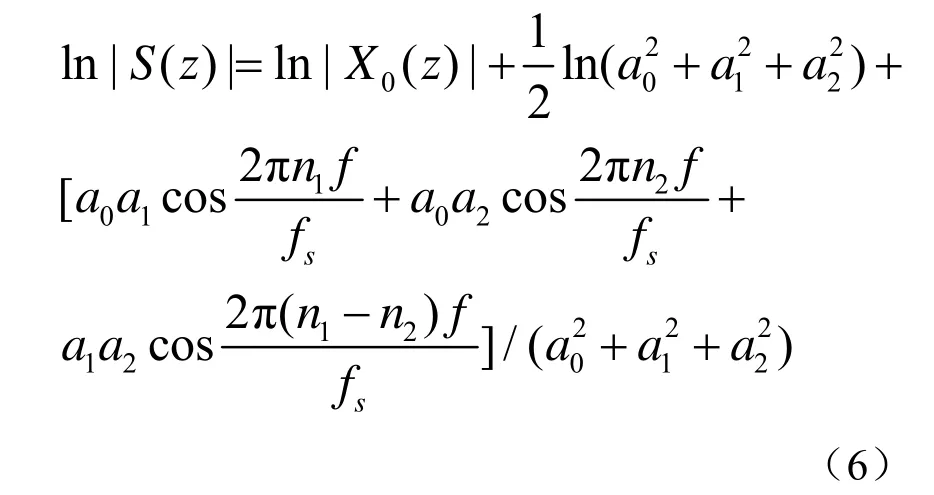
在实测甲船以 6 kn航速经过观测点时辐射噪声的倒谱历程图(图14、15)中,两簇条纹分别反映了海底反射和海底-海面二次反射的时延变化。由观测的距离和深度数据(阵深h=25 m,海底深H=100 m,横距d=200 m),从几何关系分别解算出目标在正横位置时两条反射路径分别相对于直达路径的时延

得1τ=42.8 ms,2τ=66.3 ms(声速c取1500 m/s)。这两个数值与从图14与15中读出的数据一致。在另一次测量中,该船以4 kn航速通过,横距d=160 m,从倒谱历程图(图16、17)中读出的时延数据同样与式(7)(8)的几何计算结果相符。而乙船的辐射噪声倒谱历程图(图18)同样显示了该船与观测阵距离的变化。乙船的航行轨迹近似为一圆弧而非直线,因此其距离变化情况与甲船不同,不像甲船一样有明显的远-近-远这一过程。
观察图14~18还可以发现,图中的时延条纹均为紧密排列成簇,这是由于反射波幅度较强,式(5)的幂级数展开式中高次项也将呈现在图上。高次项的情况较复杂,在此不作进一步分析。
在图14和16中,除了各簇时延条纹外,还可以看到一条强烈的亮线(图14中倒频率约0.12 s处,图16中倒频率约0.12~0.14 s处),该亮线代表发动机的旋转周期[10]。图16中的亮线存在若干次跃变,并在时间上与图7中的频率“错位”相对应。由此推测该现象产生的原因是为了保持4 kn航速而进行的发动机的工作状态调整。图14和16中的亮线表明,甲船在4 kn和6 kn航速下其发动机的转动频率约为7~9 Hz。由于该频率很低,对于类似的情况,STFT法得出的时频历程图将无法有效反映出目标信号的时频特性。

图14 甲船6 kn辐射噪声波束输出信号倒谱历程图

图15 甲船6 kn辐射噪声倒谱历程图(局部)
图16 甲船4 kn辐射噪声波束输出信号倒谱历程图

图17 甲船4 kn辐射噪声倒谱历程图(局部)
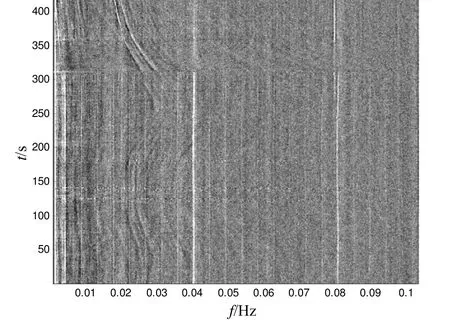
图18 乙船辐射噪声波束输出信号倒谱历程图(局部)
3.3 仿真验证
为简便起见,假定为单水听器,仅考虑直达波和海面、海底反射。仿真参数:速度 3 m/s,水深100 m,目标和水听器均位于水下30 m,海面反射系数为−1,海底反射系数为1,其余条件同2.2节。发射信号经直达路径和两条反射路径到达水听器,经过相应的衰减和延时后叠加。发射信号分别取白噪声和两种仿真辐射噪声。对每组信号分别作波形图和倒谱历程图,结果如图 19~21。在倒谱的计算过程中,对数反变换没有取绝对值,因此有部分线条为黑色,对应负反射系数。

图19 接收信号倒谱历程图,白噪声
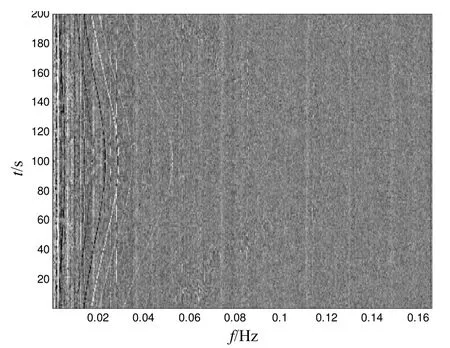
图20 接收信号倒谱历程图,辐射噪声1
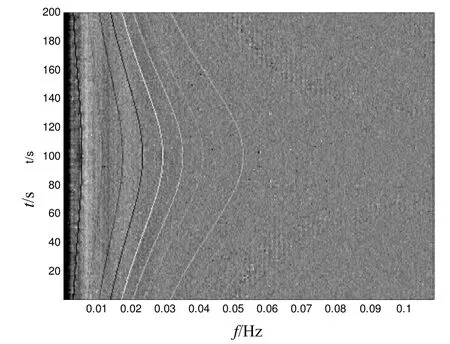
图21 接收信号倒谱历程图,辐射噪声2
仿真结果表明,短时倒谱变换可以在保留目标信号频谱特性的同时反映信道传输特性,即多径时延随目标位置的变化。从图中的条纹可读出各声线的时延(图19~21),同样与几何计算结果一致。另外高次项的“泛倒频”条纹也符合预期。
4 结论
本文综合运用时延波束形成、频谱瀑布图、窄带滤波和倒谱瀑布图法分析了目标辐射噪声的线谱通过特性、信道的时变特性和目标船发动机的低频调制特性。在运用几何模型的通过特性仿真中,不仅验证了倒谱法分离信道传输函数和目标信号频率特性的作用以及提取低频调制分量的作用,还发现了目标信号本身的一些情况,包括在正横位置附近很明显的规律性的功率波动现象,以及目标船只为保持航行速度而改变发动机工作状态导致的频谱跃变和“错位”现象。对于辐射噪声本身的建模分析与仿真验证,则有待在今后进一步完善。
猜你喜欢
党员文摘(2022年14期)2022-08-06 07:19:22
舰船科学技术(2022年10期)2022-06-17 06:27:00
党员文摘(2022年7期)2022-04-28 08:57:58
党员文摘(2022年1期)2022-02-14 06:09:00
党员文摘(2022年3期)2022-02-12 10:38:14
通信技术(2019年3期)2019-05-31 03:19:08
电子测试(2018年6期)2018-05-09 07:31:54
声学与电子工程(2017年1期)2017-06-22 11:30:09
四川师范大学学报(自然科学版)(2015年4期)2015-02-28 14:08:20
舰船科学技术(2015年8期)2015-02-27 15:38:52