
存储式测井仪器状态监测系统设计
2018-07-10 02:43:12曹博凡刘湘政张雄辉蔡志明张勇章鹏
测井技术 2018年3期
曹博凡, 刘湘政, 张雄辉, 蔡志明, 张勇, 章鹏
(1.重庆大学光电技术及系统教育部重点实验室, 重庆 400044; 2.中国石油集团测井有限公司技术中心, 陕西 西安 710077; 3.中国石油集团测井有限公司西南分公司, 重庆 400021)
0 引 言
随着测井技术的发展,大斜度井、水平井和复杂井越来越多,测井难度越来越大,对测井工艺也提出了更高的要求。传统的电缆测井施工安全风险大,湿接头式管具输送电缆测井对接成功率低,井控风险大[1],随钻测井成本较高。无电缆过钻具存储式测井技术不仅克服了这些缺点,而且在施工的时候能使仪器得到很好的保护[2-4],在大斜度井、水平井和复杂井测井中有着广泛的应用。但是,在过钻具存储式测井过程中,由于地面系统无法获知井下仪器的状态,测井成功率低。为提高测井成功率,对测井仪器在泵出之前的状态监测尤为必要。
为实现存储式测井过程中仪器在泵出之前的状态监测,井下仪器必须与地面系统建立联系,因此有必要对存储式测井工艺进行改进。泵出存储式测井系统采用电缆跟进式泵出测井,但是无法监控仪器在井下的工作状态[5]。黄鹏宾[6]和曹宇欣等[7]探讨了在无电缆存储式测井工艺基础上加入电缆后的测井工艺流程。中国石油川庆钻探工程有限公司也对过钻具存储式测井工艺进行了改进。本文在改进的过钻具存储式测井工艺基础上,利用电缆传输方式,设计了测井仪器状态监测系统,使得井下仪器同时满足仪器状态数据传输和测井数据本地存储两方面功能,实现了在泵出之前对仪器状态的监测。
1 改进的过钻具存储式测井设备
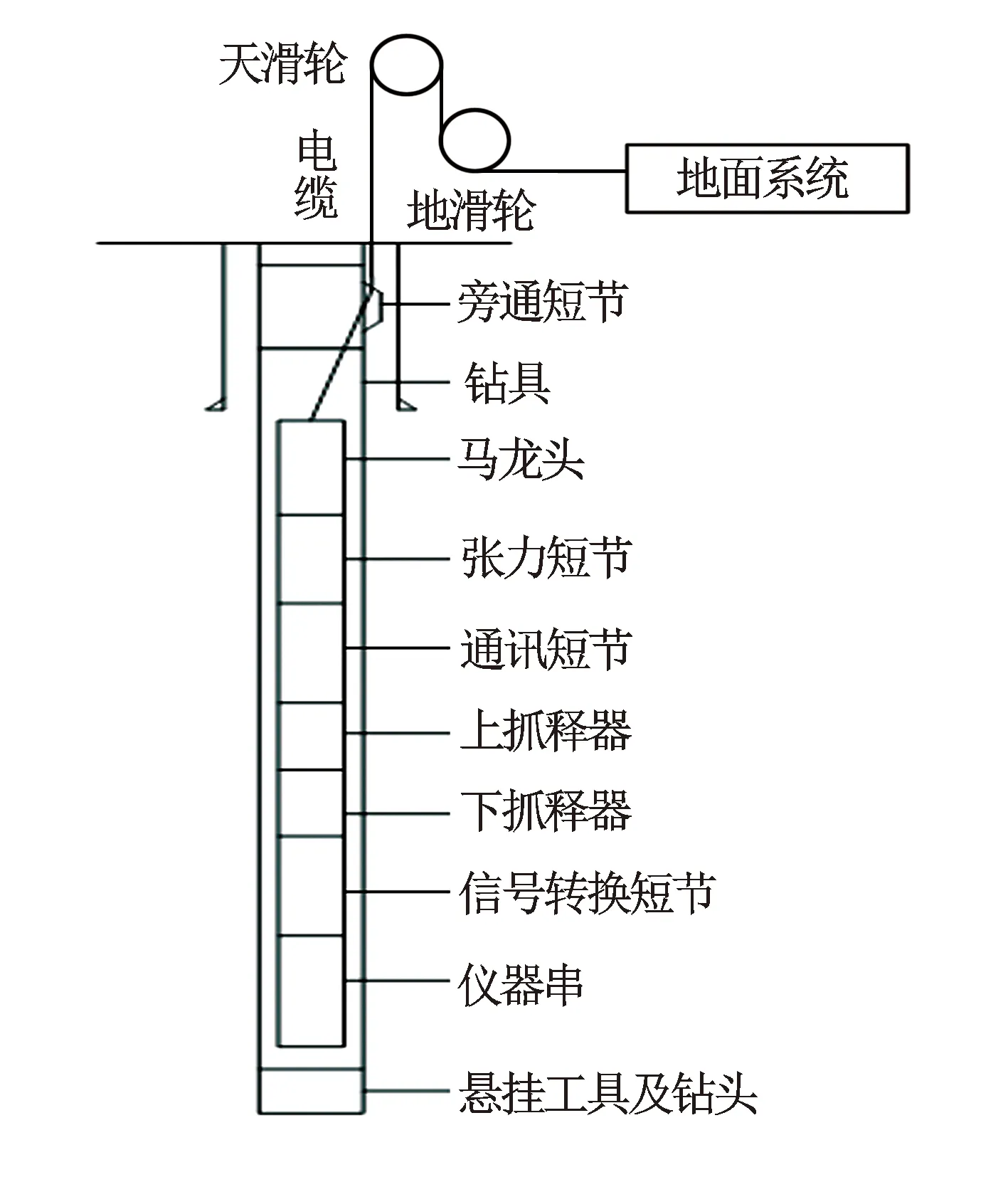
图1 改进的过钻具存储式测井设备结构图
改进的测井设备结构如图1所示。测井流程:首先将钻具下至目的层段,随后用电缆将测井仪器通过钻具水眼下放,用泥浆泵加压使仪器泵出钻具;在进行仪器的状态监测后,通过地面系统控制抓释器断开电缆与仪器,取出电缆及与其连接的上部工具,上提钻杆进行测井;在测井完毕后可以用电缆下放回收工具,地面系统发送命令控制上下抓释器连接,从钻具中快速收回测井仪器,最后将钻具起至地面。其中,抓释器的连接与脱离是比较关键的环节,上抓释器为母头,下抓释器为公头,母头和公头均分布若干导电环,导电环分别与电缆的每根芯相接,当公头和母头完全对接时,电缆与仪器实现电气连接。正式测井前需要断开电缆与仪器,地面系统控制电机反转,使套筒松开抓释器,通过电缆撤回上抓释器及上部工具;当测井完成后电缆与仪器连接时,由电缆释放上部工具,使抓释器公头和母头对接,地面系统控制母头上部的电机马达正转推动套筒锁紧抓释器,实现电缆与仪器相连。
2 系统设计方案
仪器的状态监测是要获得井下仪器的响应参数,以此来推断仪器的工作状态。无电缆过钻具存储式测井的测井数据保存在井下仪器中,改进的过钻具存储式测井用电缆作为地面系统与井下仪器的信息传输媒介,地面系统获取井下仪器的状态信息是系统设计的重点。为此,需分别设计电缆与地面系统及井下仪器的通信接口模块。为保证改进的存储式测井工艺的可靠性,系统还需地面绞车编码器和电缆张力计获得仪器深度和电缆张力数据。
系统包括地面系统和井下系统,地面系统包括计算机和地面监测模块,井下系统包括井下通信转换模块和井下仪器串。地面系统和井下系统由电缆连接,通过电缆传输方式实现数据通信。整个系统的结构见图2。计算机发送相应的状态监测命令,由地面监测模块编码之后通过电缆传输到井下系统,仪器返回相应的状态数据。存储式测井仪器的数据接口采用CAN总线,通信转换模块实现命令和状态数据在电缆和CAN总线之间的数据接口转换。地面监测模块对井下仪器上传的状态数据、地面电缆张力数据和深度数据进行采集,最后将测井数据、电缆张力数据和深度信息通过USB控制器发送到计算机,计算机对这些数据进行解码,并显示测井数据曲线。

图2 仪器状态监测系统结构
3 系统硬件设计
3.1 地面系统
地面系统主要实现对来自于计算机命令的编码与驱动、仪器状态数据和电缆张力数据的获取、数据通信等方面的功能。以TI公司的DSP处理器为核心设计地面监测电路的系统见图3。地面系统的硬件包括计算机、USB通信接口、DSP控制模块、命令驱动模块、数据增益控制模块、深度信号处理模块、电缆张力处理模块和电源模块。
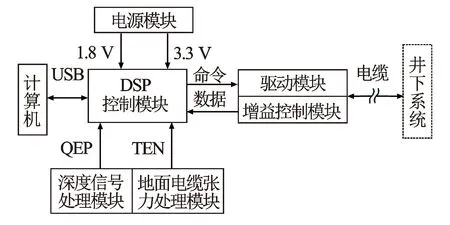
图3 地面监测模块设计框图
地面系统的核心是DSP控制模块,选用的TMS320F28069处理器的CPU主频高达90 MHz,其片内的ADC的采样速率最高可达3.46 MSPS(Millon Samples Per Second)[8],满足对测井数据采集的要求。F28069还集成了正交编码脉冲(QEP)模块,实现对深度信号的处理。F28069集成的通用串行总线(USB)2.0模块可以实现地面监测模块与计算机之间的数据传输。
DSP控制模块对计算机发送的命令信号进行编码,转换为AMI曼彻斯特码,在电缆上传输的AMI曼彻斯特码的波形接近正弦波,信号中的高频谐波成分很少,误码率低[9]。一般的油气井深度很大,为减少信号能量的衰减,需要驱动模块对编码后的命令信号进行功率放大,使井下仪器收到有效的命令信号。增益控制模块对井下仪器上传的数据信号进行放大之后输入DSP模块的AD采集通道,系统中采用了程控放大电路。地面电缆张力处理模块对地面电缆的张力信号进行滤波与放大之后输入DSP的另一个AD采集通道。深度信号处理模块对输入系统的绞车编码器产生的脉冲信号进行整形和电缆抖动消除预处理后输入DSP的QEP模块。DSP模块实现地面系统的控制和状态数据的采集与上传。
3.2 井下系统
井下系统实现命令信号与状态数据的收发和井下状态参数的采集功能。井下系统框图见图4。井下系统包括信号调理模块、主控模块、张力、井温及CCL传感器和井下仪器串。

图4 井下系统设计框图
信号调理模块对地面下发的命令信号滤波整形,使AMI曼彻斯特码成为标准曼彻斯特码发送给主控模块,并对主控模块输出的状态数据信号进行驱动之后通过电缆发送至地面系统,实现命令和状态数据的信号调理。主控模块采用了TI公司的DSP处理器TMS320F2808实现对下行命令的解码和上行数据的编码,以及命令和数据在曼彻斯特码数据与CAN数据之间的转换,实现了命令和数据的双向传输。主控模块还可实现对仪器串张力、井下温度和CCL(套管接箍定位)信号等状态参数的采集。
4 系统软件设计
4.1 地面系统软件设计
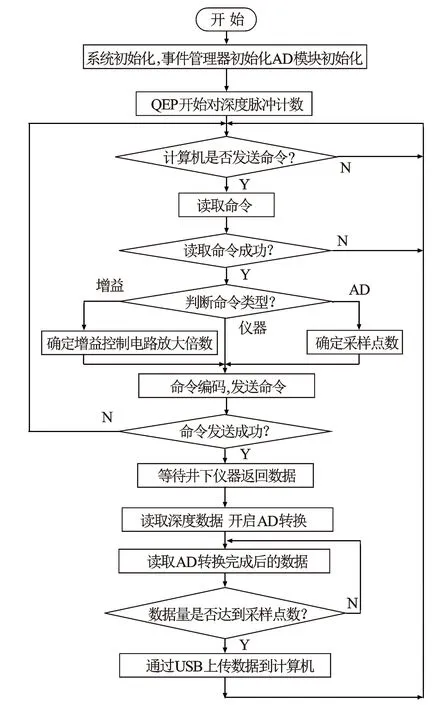
图5 DSP控制模块软件设计流程
DSP控制模块软件设计采用C语言在CCS平台完成开发和调试。软件设计流程见图5。当软件系统检测到计算机发送的命令时,DSP模块对命令进行编码,使其输出传输速率为20.83 kbit/s的AMI曼彻斯特码[10]。软件系统等待接收井下仪器状态数据,ADC模块实现数据采集,通过控制通用定时器的周期中断启动DSP的AD转换,测井数据的传输速率为41.66 kbit/s[10],根据Nyquist采样定理[11],设置采样频率1 MHz。当数据量达到设定的采样点数时,通过USB将测井数据发送到计算机解码。为了保证测井工艺的可靠性,在定时器的控制下,对电缆张力和仪器深度的定时采集。
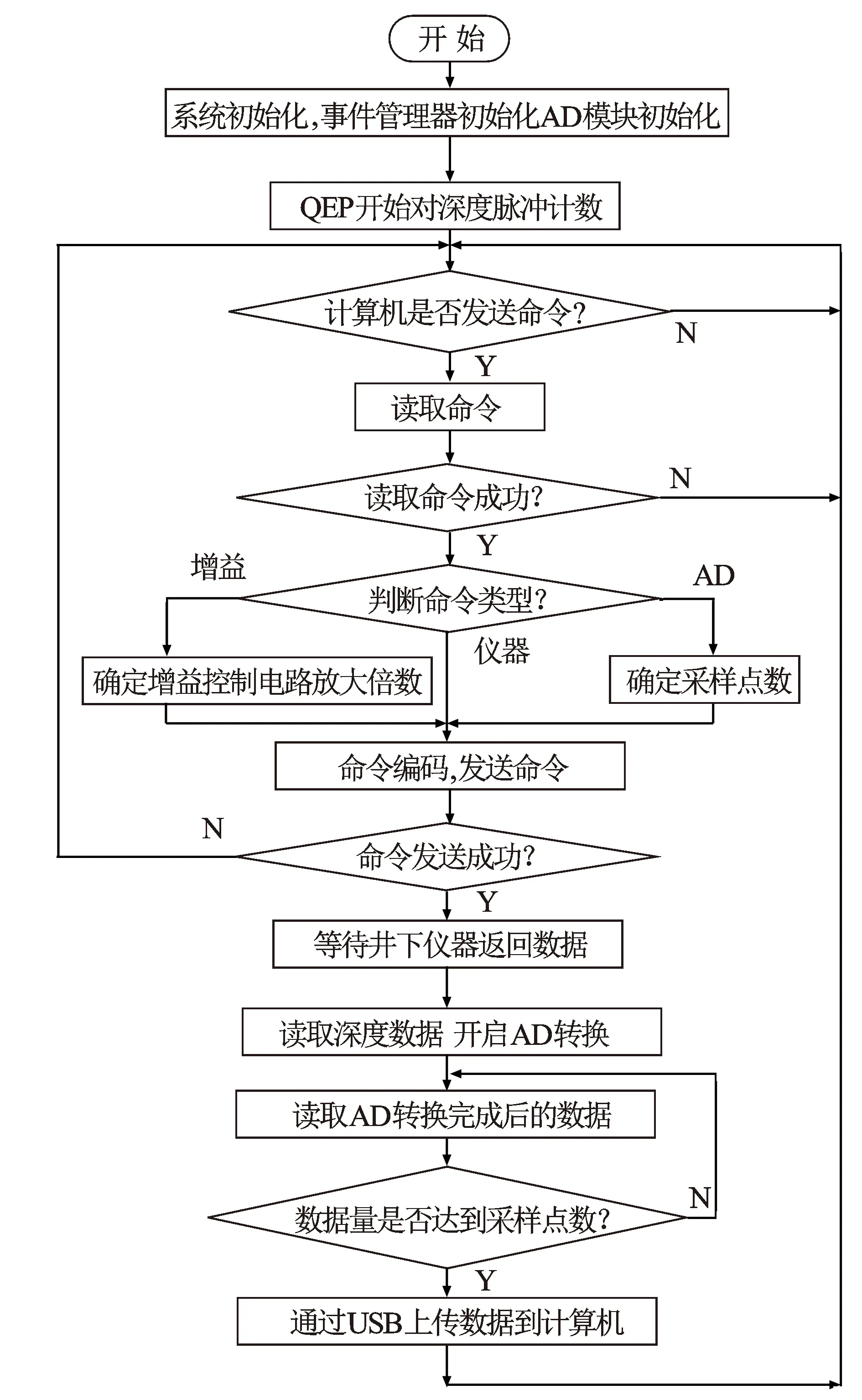
图6 信号转换模块软件设计流程
4.2 井下系统软件设计
井下通信转换模块的软件程序设计流程见图6。当检测到命令信号时,软件系统对命令进行解码。每个命令中包含传感器或井下某支仪器的地址。若解码后命令中的地址与传感器匹配,主控模块将采集传感器状态数据。若解码后命令中的地址与仪器串的某只仪器匹配,利用CAN模块将命令信号发送给井下仪器串。在仪器收到命令之后,仪器状态数据将通过CAN总线传输到主控模块。状态数据由主控模块编码之后发送到信号调理模块。
5 实验验证
5.1 井下状态传感器监测实验
井下状态传感器包括仪器串张力传感器、温度传感器和CCL传感器,地面的绞车编码器和电缆张力计可获得仪器的深度信息和电缆张力数据。实验中采用光电编码器产生的脉冲信号输入地面电缆张力处理模块模拟实际的绞车编码器的脉冲信号。
仪器下放过程中,地面系统对状态传感器实现定时监测。由计算机设定定时采集的间隔为150 ms,每隔150 ms会发采集命令,由地面监测系统编码后通过电缆传输到井下系统,示波器捕获的反相命令信号的波形见图7。命令信号的数据传输速率为21.83 kbit/s,即每位的时间宽度为48 μs,图7中前面的负脉冲和正脉冲为命令的同步信号,占1.5位的宽度,即72 μs。
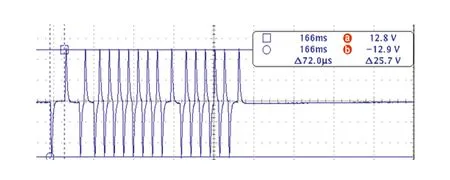
图7 命令信号波形图
井下系统收到命令后发送状态数据到地面系统。地面系统计算机可实时显示测井数据曲线(见图8)。计算机界面实时显示CCL波形、电缆张力波形和相关状态参数,其中“张力”为电缆地面张力,“张力2”为井下仪器串张力。
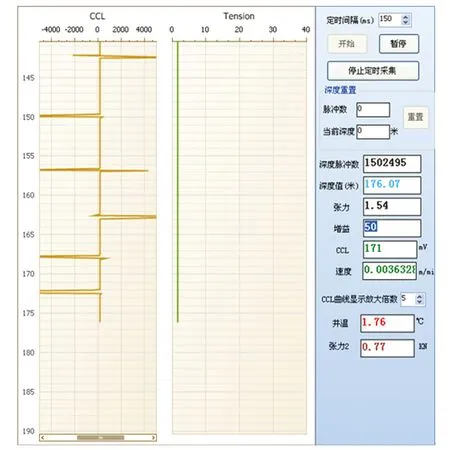
图8 计算机界面(局部)
5.2 抓释器控制实验
计算机分别发送抓释器马达开和抓释器马达断命令,井下系统均能正常返回数据0x00AA与0x00BB,表示抓释器控制功能正常。
6 结 论
(1) 无电缆过钻具存储式测井过程中无法对测井仪器进行状态监测,针对一种改进的过钻具存储式测井技术,设计了测井仪器状态监测系统。
(2) 该系统可以实现仪器状态监测功能,提高了测井成功率。
猜你喜欢
测井技术(2022年3期)2022-11-25 21:41:51
娃娃乐园·综合智能(2022年3期)2022-04-19 12:57:10
中国煤层气(2021年5期)2021-03-02 05:53:12
趣味(数学)(2019年12期)2019-04-13 00:28:48
军营文化天地(2018年2期)2018-04-20 07:07:49
中国科技信息(2016年6期)2016-08-31 07:27:10
中国老区建设(2016年9期)2016-02-28 09:34:00
中国科技信息(2015年23期)2015-11-07 08:25:56
中国煤层气(2015年4期)2015-08-22 03:28:01
中国质量与标准导报(2015年2期)2015-02-28 22:27:15
