
新型智能船舶舱底水油分浓度检测系统∗
2018-07-10 09:25黄胜健
计算机与数字工程 2018年6期
黄胜健 齐 亮
1 引言
《MARPOL 73/78》国际防污公约明确规定:经油水分离器分离后的舱底水需经油分浓度检测含油量低于15ppm后方可排放入海[1]。采用浊度法实现原位、实时在线的船舶舱底水油分浓度检测,是通过建立水样的散射光强与样品油分浓度之间的数学模型,在该模型的基础上,通过新样品的散射光强来预测其对应的油分浓度。油分浓度预测的建模方法在很大程度上影响着整个油分浓度检测的精度。然而,传统的基于浊度法的船用油分浓度预测的建模是基于瑞利散射定律的。理论上采用浊度法能够精确测量的油分浓度范围在26ppm以下,超过26ppm就要进行非线性补偿计算,使用软件方法排除误差[2~3]。同时由于油滴颗粒大小以及气泡等干扰因素的存在,导致传统的单一线性建模会造成偏差[4]。本文采用LS-SVM建立油分浓度预测模型,LS-SVM具有较好的泛化能力,在解决小样本统计、非线性建模方面得到很好的应用[5]。同时确定将PSO算法联合LS-SVM用于船用油分浓度检测的预测模型中,由于PSO算法精度较高、收敛速度较快、具有全局优化的能力,可以优化LS-SVM模型的核函数σ参数和惩罚因子γ达到最佳值,以此提高LS-SVM模型的预测精度[6]。
2 检测原理与系统结构
2.1 船用油分浓度计检测原理
船舶舱底水中含有大量各类油污,舱底水经过油水分离器分离后,绝大部分污油被分离过滤掉,剩余溶液主要是油滴在水中经过长时间的物理化学变化、溶解、乳化形成稳定的乳浊液。同时,乳浊液中含有不同颗粒大小的油滴[7~9]。当采用一束平行光照射样品溶液时,一部分光直接通过水样透射出去,另一部分光被样品溶液中的油滴吸收,剩余部分则被油滴颗粒物散射,光在水样中的传播满足朗伯-比尔定律与瑞利散射定律。
本文设计采用波长在980nm的红外半导体激光二极管作为船用油分浓度检测系统的光电传感器的红外发射光源,采用102像素的线阵CMOSS光电传感器作为探测器。将光电探测器安装在固定位置连续检测不同角度的散射光。由于油类物质对该980nm波长的红外光没有明显的特征吸收,即可近似的认为,980nm红外光经过水样时,一部分发生了散射,剩余的则完全透过水样透射出去,再结合瑞利散射定律,建立如下散射光强与油分浓度的关系,如式(1)所示:

IO为经调制后的入射光的强度,IS为散射光的强度,λ为红外入射光的光源波长,N为单位体积内悬浮颗粒数,V为颗粒体积,K为与入射光波长、折射率等有关的比例系数。可见,散射光光强与悬浮颗粒物的总量NV2成比例,也就是与溶液中的油分浓度成比例[10~11]。
2.2 新型智能船用油分浓度计系统结构

图1 系统结构图
新型智能船用油分浓度检测系统结构如图1所示,它由油分浓度光电传感器、油分浓度信号处理模块、上位机监测系统三部分组成。信号变送模块主要负责完成红外光源的调制,散射通道光强信号的采集及A/D转换,与上位机通讯进行数据传输等工作。本文选用STM32作为主控芯片。上位机监测系统主要实现油分浓度传感器的信号采集、油分浓度解算、显示及存储等功能。本文选择美国National Instruments公司(简称NI公司)研发的Lab-VIEW开发平台进行上位机软件设计。
3 油分浓度预测模型
3.1 最小二乘支持向量机LS-SVM
式(2)中,ω∈Rn位权向量;γ为正则化参数;ek为误差变量;输入向量经函数φ( )xk映射到高维特征空间;b∈R为偏置参数。对应的Lagrange函数为

式(3)中,ak为Lagrange乘子。通过KKT最优条件,可将式(3)转化为如下线性方程组:

其中,称为核函数,本文采用RBF径向基核函功避免了求解复杂的映射函数φ(xk),大大降低了模型的复杂性减少了计算量。
最后采用最小二乘算法求解式(4),即可得到a和b的值,最终确定预测模型的决策函数:数,其未知参数为核函数宽度σ。核函数的选择成

经过以上分析可知,通过引入等式约束和最小二乘价值函数,能够将求解参数的优化问题转变为求解线性方程的问题。除此之外采用核函数的LS-SVM,仅需确定γ和σ两个参数,最大程度的降低了算法和求解的复杂性。
3.2 粒子群优化PSO
粒子群优化PSO算法中,每个粒子都有位置、飞行速度、飞行方向和飞行步长。PSO算法:首先对该种群粒子进行初始化,接着进行多次的迭代搜寻解空间的最优解。种群中的粒子在每一次的迭代过程中,通过跟踪两个“极值”并进行比较,来不断更新自己下一次迭代的飞行速度和位置:其中第一个极值就是粒子本身所找到的最优解,即个体极值;剩余的一个极值就是目前种群中所有粒子找到的最优解,即全局极值。
PSO算法数学描述为:在一个拥有D维解的目标搜索空间中,采用N个粒子组成一个种群群体,假设这个种群中的第i个粒子的位置向量为xi=(xi1,xi2,…,xiD),速度向量为 vi=(vi1,vi2,…,viD),个体极值为 pi=(pi1,pi2,…,piD),整个种群的全局极值为 pg=(pg1,pg2,…,pgD),然后进行迭代寻优,根据各粒子的适应值来评价其优劣,并找到当前时刻的个体极值和全局极值。对于第t次迭代,其第d维( )1≤d≤D 根据下列方程更新:
式(6)中,γ1和 γ2为[ ]0,1之间的随机数,c1和c2为学习因子;w为惯性权重。
3.3 基于粒子群优化的最小二乘支持向量机算法PSO-LS-SVM
本文运用PSO优化算法联合LS-SVM完成船舶舱底水油分浓度预测模型的建立,将LS-SVM中的核函数宽度σ和正则化参数γ,即(γ,σ)作为PSO算法中粒子的位置向量。整体算法流程如图2所示[11]。
首先初始化粒子群的位置和速度信息,然后将每个粒子代入LS-SVM模型中,以均方根误差RMSE的计算公式作为适应度函数,通过计算每一次迭代后的适应值来评价各粒子的适应度。根据结果计算的适应值,更新全局极值和个体极值,最后判断是否满足条件,不满足继续进行迭代计算,满足条件则输出最优参数至LS-SVM的参数,进行训练、反归一化求解模型,最后输出结果。
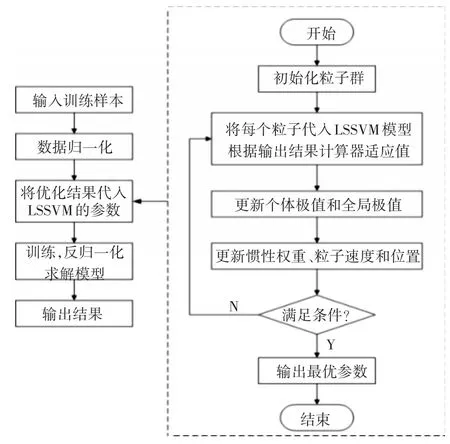
图2 PSO算法流程图
4 实验及结果分析与讨论
为了对本文建立的基于PSO算法的LS-SVM船用油分浓度预测模型的预测性能进行验证和评价,分析模型的泛化能力以及预测结果与实际浓度值的偏差。采用厦门星鲨有限公司生产的GQS-186油分浓度计配置了14组样本溶液,将其中的10组作为LS-SVM与PSO-LS-SVM油分浓度预测模型的训练样本数据,剩余4组作为测试样本数据,分别采用LS-SVM、PSO-LS-SVM、最小二乘拟合三种建模方法建立船用油分浓度预测模型。为了对模型的预测性能作出评价,分析预测结果偏离实际值的情况,本文采用相对误差(RE)、均方根误差(RMSE)、平均相对误差(MRE)评估模型预测效果。
LS-SVM模型的参数经过多次实验依据经验设定,LS-SVM模型与PSO-LS-SVM模型的油分浓度预测数据与实际数据比较结果分别如表1、表2所示,油分浓度预测值与真实值的比较曲线如图3、图4所示。表3所示为采用最小二乘法对10组样本数据进行拟合的实际值与拟合值比较结果,图5为采用最小二乘法对10组样本数据进行拟合的实际值与拟合值比较曲线图。
从表1中可见LS-SVM油分浓度预测模型的最小相对误差达到5.35%,平均相对误差为9.38%,均方根误差为1.10。
由表2可见经过PSO对LS-SVM模型参数优化后。PSO-LS-SVM模型预测值的最小相对误差达到0.98%,平均相对误差为3.37%,均方根误差仅为0.39。平均相对误差(MRE)的提升幅度为64%,均方根误差(RMSE)的提升幅度为64.5%。测试样本1~4,每个样本的值的各项评价指标均优于未经PSO优化的最小二乘支持向量机油分浓度预测模型。

表1 基于LS-SVM模型的预测结果

表2 基于PSO-LS-SVM模型的预测结果

表3 基于最小二乘拟合的预测结果
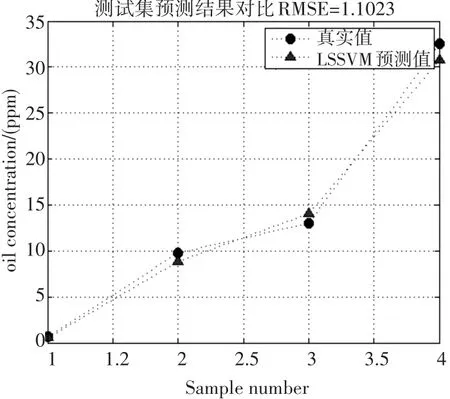
图3 LS-SVM预测值与真实值曲线图
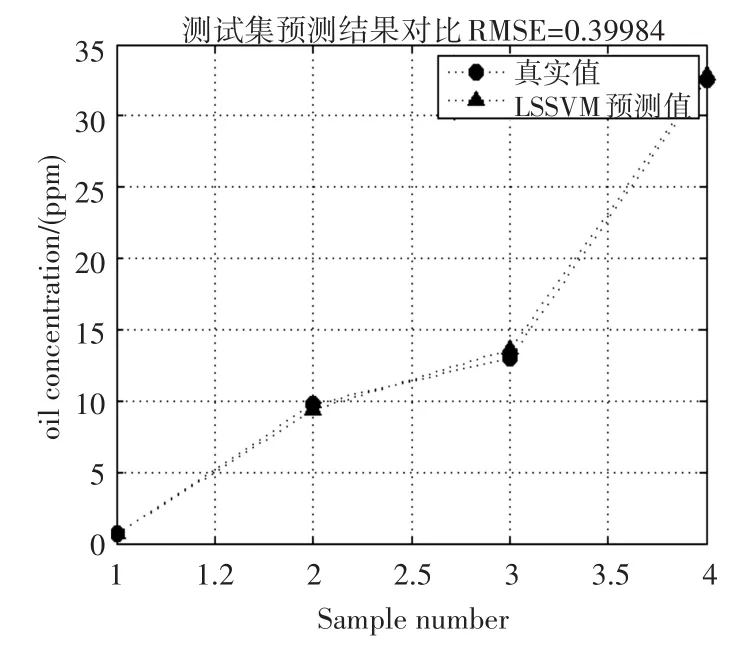
图4 PSO-LS-SVM预测值与真实值曲线图

图5 最小二乘拟合值与真实值曲线图
为了进一步比较PSO-LS-SVM模型预测的优势,随机选取十组样本采用最小二乘法进行线性拟合,从表3中可以看出在浓度低于1ppm时,预测值的误差较大,样品浓度在1ppm以上时,最小相对误差为0.04%,均方根误差为1.33。总体来看,PSO-LS-SVM模型预测性能仍优于传统的最小二乘拟合线性建模。
5 结语
本文通过将光学检测技术与LS-SVM理论相结合,并采用PSO算法完成了LS-SVM的参数寻优,最后完成了船舶舱底水油分浓度预测模型的建立。与未经参数寻优的普通LS-SVM油分浓度预测模型相比较,基于PSO算法优化LS-SVM模型参数的船用油分浓度预测模型,克服了单纯采用LS-SVM模型进行建模的模型精度低、泛化能力差等缺点,较之于传统的LS-SVM模型,其MRE,RMSE提升幅度分别为64%和64.5%。模型精度明显得到提高,同时,较之于传统的最小二乘拟合其均方根误差提升了70%,模型预测精度明显优于采用最小二乘拟合的线性建模的预测精度。能有效运用于船用油分浓度的检测中。
[1]叶锐.船舶油水分离器结构设计[J].交通节能与环保,2009(4):10-17.
YE Rui.Oil-water Separator Structure Design of the Ship[J].Marine Energy Saving,2009(4):10-17.
[2]邹瑞杰.基于Mie散射的微量油污染在线检测技术研究[D].天津:天津大学,2011.
ZHOU Ruijie.Study on Online Detection Technology for Oil Pollution Based on Mie Light Scattering Theory[D].Tianjin:Tianjin University,2011.
[3]于海波.水中微量油污染在线检测技术与实验研究[D].天津:天津大学,2013.
YU Haibo.Online Detection Technology of Oil Pollution in Water and Related Experimental Studies[D].Tianjin:Tianjin University,2013.
[4]姜会芬,非均匀粒子光散射特性及折射率分布测量研究[D].西安:西安电子科技大学,2007.
JIANG Huifen.On Characteristics of Light Scattering by Inhomogeneous Paeticles and Measurement of Refractive Index Profile[D].Xi'an:Xidian University,2007.
[5]周秀军,戴连奎.基于最小二乘支持向量机的橄榄油掺杂拉曼快速鉴别方法[J].光散射学报,2013,25(2):176-182.
ZHOU Xiujun,DAI Liankui.Fast Discrimination of Olive Oil Adulteration Based On Raman Spectra Using Least Squares Support Vector Machine[J].The Journal of Light Scattering,2013,25(2):176-182.
[6]龙文,焦建军,龙祖强.基于PSO优化LSSVM的未知模型混沌系统控制[J].物理学报,2011,60(11):112-117.
LONGWen,JIAOJianjun,LONGZuqiang.Control of Chaos Solely Based on PSO-LSSVM Without Using an Analytical Model[J].Acta Physical Sinica,2011,60(11):112-117.
[7]宋庆君,唐军武,马荣华.水体后向散射系数校正方法研究[J].海洋技术,2008,27(1):48-52.
SONG Qingjun,TANG Yaowu,MA Ronghua.Correction of Backscattering Coefficients in Different Water Bodies[J].Marine Technology,2008,27(1):48-52.
[8]魏斌.荧光分光光度法测量油砂工艺中的环烷酸[J].环境科学与卫生学报,2013(48):429-436.
WEI Bing.Limitation of Fluorescence Spectrophotometry in the measurement of naphthenic acids in oil sands process water[J].Journal of Environmental Science and Health,2013(48):429-436.
[9]王清华.光散射法颗粒大小与形状分析[D].南京:南京工业大学,2003.
WANG Qinghua.Particle Size and Shape Analysis With Light Scattering[D].Nanjing:Nanjing University of Technology,2003.
[10]庄媛,赵晓祥,周美华.水体中油污染状况及微量油测定方法的比较[J].环境科学与技术,2012,35(6):79-83.
ZHANG Yuan,ZHAO Xiaoxiang,ZHOU Meihua.Overviews of Oil Pollution and Detection Methods of Trace Oil in Water[J].Environmental Science&Technology,2012,35(6):79-83.
[11]汤斌,赵敬晓.一种紫外可见光谱检测水质COD预测模型优化方法[J].中国环境科学,2015,35(2):478-483.
TANG Bin,ZHAOXiaojing.A Method of Optimizing the Prediction Model for the Determination of Water COD by Using UV-Visible Spectroscopy[J].China Environmental Science,2015,35(2):478-483.
猜你喜欢
润滑油(2022年4期)2022-09-16
新世纪智能(数学备考)(2021年10期)2021-12-21
新世纪智能(数学备考)(2021年10期)2021-12-21
数学学习与研究(2020年16期)2020-12-28
语数外学习·高中版中旬(2020年10期)2020-09-10
华北农学报(2020年4期)2020-08-29
润滑油(2019年6期)2019-11-29
科学与财富(2019年15期)2019-10-21
农机使用与维修(2018年5期)2018-07-05
农业科技与装备(2017年9期)2018-03-02
