
基于虚拟仪器技术的力锤动态校准系统
2018-07-09 11:49上海市计量测试技术研究院
上海计量测试 2018年3期
/ 上海市计量测试技术研究院
0 引言
在航空、航天、汽车、兵器制造等领域中,力锤是振动模态试验的主要激励源[1-3]。生产厂家在出厂检定时往往只给出力锤内置传感器在其工作范围内的线性灵敏度,现行部分国家标准以及检定规程也存在不同程度“静标动用”的问题[4]。在实际使用中,受到锤头质量、材质以及锤体配重的影响,力锤的实际力值与使用出厂静态灵敏度得到的测量值存在显著差异[5-8]。
力锤在其工作范围内可认为是一个线性的时不变的欠阻尼二阶系统,如图1所示。其微分方程为

式中:k—— 力锤内置传感器等效刚度;
c—— 力锤内置传感器等效阻尼;
m—— 力锤内置传感器等效质量;
M—— 锤头、锤体、配重的等效质量
令为稳态增益,则:


图1 力锤工作原理
该系统的传递函数为

由式(2)可知,力锤的动态灵敏度与其内置传感器存在着一定的差异,使用内置传感器灵敏度来代替力锤的灵敏度是有待商榷的。故本文设计了一种力锤动态校准系统用于校准力锤。
1 力锤动态校准系统装置
力锤动态校准系统装置如图2所示,采用脉冲式动态力比较法校准。力锤垂直敲击标准力传感器敏感面,通过标准力传感器测量两者间作用力的大小,实现动态力值的复现,将复现的力值与力锤的输出量进行对比来得到校准结果。该方法模拟力锤工程测量的使用环境,简单方便。该装置可产生10~10 000 N脉冲式动态力,通过改变缓冲垫的材质、厚度,可改变脉冲力的脉宽时间0.5~10 ms。
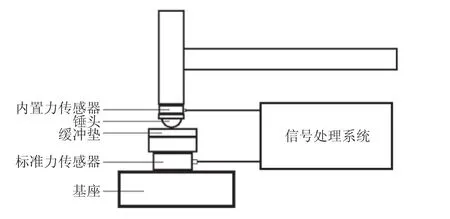
图2 力锤动态校准系统装置
信号处理系统采用美国NI公司的USB-4431 24位数据采集卡,适用于集成电路压电式(IEPE)与非集成电路压电式(IEPE)传感器,可同步采集多通道数据。采用USB进行信号传输,构建系统方便携带,适用于在线校准。
2 力锤校准软件程序
力锤动态校准程序基于LabVIEW图形化编程。LabVIEW提供了很多跟传统的仪器面板很相似的控件,用来创建人机交互界面[9]。用户界面是软件中的前面板。可以通过编程来控制前面板上的对象。改变软件,就可以实现不同的仪器仪表的功能,快捷方便,实现了软件即硬件这一理念。整个程序实现力锤校准数据的自动处理存储,包含以下模块:信息录入存储模块、测量参数设置模块、数据采集模块、线性拟合残差统计模块、峰值提取模块、脉宽计算模块、报告生成模块,程序流程如图3所示。
信息录入模块可将待测力锤的基本信息录入,包括生产厂家、型号、出厂编号、传感器类型等。
测量参数设置模块能够设置采样率、采样时间、触发前采样点数、触发比等参数,确保测试过程中采集到完整有效的数据。

图3 软件流程
数据采集模块会根据上面两个模块的设置来采集数据。如果测量数据满足相应要求,则将数据传输给下面两个模块进行计算。
线性拟合残差计算模块是对力值和力锤的输出量进行回归分析,残差可用于表征采集波形的有效性,当残差越接近0,说明拟合效果越好,数据可信度越高;残差过大,则需对数据进行剔除,重新采集波形。
脉宽计算模块用于计算冲击脉冲从基准值上升到最大值,再下降到基准值所需的时间,通常规定脉冲最大值的10%为基准值。
报告生成模块将记录每次有效测量的标准力值、力锤灵敏度幅值、脉宽等信息,生成报告。
3 力锤动态校准系统的校准结果
力锤动态校准系统可用于校准力锤、模态分析系统的激励端等仪器设备。以PCB生产的086C03型力锤为例,校准结果如表1所示。
校准结果表明,该力锤的参考灵敏度2.23 mV/N,线性度0.24%。

表1 086C03型力锤校准结果
4 力锤动态校准系统的测量结果的不确定度
本文参照GB/T 20485.22-2008《振动与冲击传感器校准方法第22部分:冲击比较法校准》[10]、JJG 632-1989《动态力传感器》检定规程[11],结合多年积累的实验数据和经验,通过大量的实验和理论研究,对力锤灵敏度幅值测量的不确定度进行了分析评估。
被校力锤灵敏度幅值测量的不确定度主要包括以下方面:由标准动态力传感器引入的不确定度分量;由被校力锤引入的不确定度分量,这部分主要包括重复测量、基座应变/安装、旋转/横向运动、电缆应变和环境温度等因素。信号适调仪和算法等也会引入相应的不确定度分量。
根据力锤灵敏度校准的方法,建立力锤灵敏度幅值的测量模型:

式中:—— 被校力锤灵敏度幅值;
—— 标准力传感器的灵敏度;
—— 被校力锤峰值电压,mV;
—— 标准力传感器峰值电压,mV
在实际测量中,因影响因素很多,采用比较法实现被校力锤灵敏度幅值测量的测量模型为

上述各输入量相互之间独立无关,各不确定分量的灵敏度系数绝对值为1,标准不确定度各因素引入的标准不确定度见表2。

表2 标准不确定度分量一览表
力锤灵敏度幅值的合成不确定度urel= 1.74%,相对扩展不确定度Urel= 3.5% (k= 2)。
5 结语
本文介绍了一种基于虚拟仪器技术的力锤动态校准系统。该系统模拟力锤在工程测量的实际使用环境,敲击产生脉冲力,与标准动态力传感器比较对力锤进行校准。解决了传统方法“静标动用”的问题,以及用力锤内置传感器灵敏度代替力锤的灵敏度存在的差异。利用不同材料、厚度的阻尼缓冲垫,可产生脉宽时间 0.5~10 ms,10~10 000 N 脉冲式动态力。该系统灵敏度幅值的扩展不确定度为3.5%。
[1]纪晓东,钱稼茹,徐龙河.模拟环境激励下结构模态参数识别试验研究[J].清华大学学报(自然科学版),2006,46(6):769-772.
[2]詹胜,谭华耀,徐幼麟,等.裸光纤光栅及光纤力锤在大桥模型试验中的应用[J].工程力学,2011,28(03):103-108.
[3]陈兴武. 人头部力锤试验的生物力学研究及有限元模型的建立[D].广州:第一军医大学,2004.
[4]商佳尚,王宇. 动态力校准中需要规范的若干问题[J]. 计测技术,2014,34(02):1-5+10.
[5]尹肖,张力,王宇,等. 动态力校准中力传感器端部等效质量测量方法研究[J].计测技术,2014,34(06):50-53.
[6]尹肖,王宇,杨军.动态力校准技术评述[J].计测技术,2015,35(02):6-10+18.
[7]孙桥,于梅.冲击及瞬态冲击力绝对法校准技术的研究现状[J].工业计量,2005,15(1):12-15.
[8]胡刚,孟峰,张伟,等. 轴向加荷疲劳试验机动态力校准装置的性能研究与应用[J].计量技术,2017(12):65-70.
[9]严一平. 虚拟仪器技术和发展趋势[J]. 上海计量测试,2005,32(3):16-23.
[10]全国机械振动、冲击与状态监测标准化技术委员会.GB/T 20485.22-2008振动与冲击传感器校准方法第22部分:冲击比较法校准[S]. 北京:中国标准出版社,2008.
[11]中国计量科学研究院.JJG 632-1989动态力传感器[S].北京:中国计量出版社,1989.
猜你喜欢
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
计量学报(2020年7期)2020-08-07
液压与气动(2020年4期)2020-04-10
制造技术与机床(2018年12期)2018-12-23
成都信息工程大学学报(2017年1期)2017-07-21
电子制作(2017年7期)2017-06-05
军事文摘·科学少年(2016年10期)2016-12-08
电测与仪表(2016年15期)2016-04-12
中国继续医学教育(2015年3期)2016-01-06
探测与控制学报(2015年4期)2015-12-15
