
国外空间目标探测与识别系统发展现状研究
2018-07-06 08:50:12王雪瑶
航天器工程 2018年3期
王雪瑶
(北京空间科技信息研究所,北京 100086)
近年来,全球空间优势争夺激烈,空间环境日益恶化,空间态势感知作为开展各类空间活动的基础能力,已经引起高度关注。空间态势感知是空间安全与空间作战的基础,旨在尽可能彻底地描述在陆地环境和太空领域运行的太空能力,确保空间操作与空间飞行安全,保护太空能力、军事行动和国家利益等,主要分为探测/识别(DT/ID)、威胁告警和评估(TW&A)、特征描述、数据集成和利用(DI&E)。其中,空间目标探测与识别是指搜索、发现、跟踪,对空间目标和事件进行监视,辨别空间目标,识别空间目标的类别等。其主要作用是支持飞行安全并支持空间控制任务,为作战中心构建通用作战图提供数据支持。因此,空间目标探测与识别是空间态势感知的数据来源,是获取未来空间优势的重要保证,已成为优先发展领域。美国正试图构建天地一体化的空间目标探测与识别系统,在地面升级部署多频段雷达系统、发展新型空间监视望远镜(SST)等光学设备,探测识别全域空间目标;在低轨(LEO)部署天基空间监视系统-1(SBSS-1)及作战响应空间-5(ORS-5)等卫星,探测地球静止轨道(GEO)目标;部署地球同步轨道空间态势感知计划(GSSAP)星座,以抵近侦察GEO目标。俄罗斯也发展具有LEO目标探测能力的地基大型相控阵导弹预警雷达网,同时发展窗口(Okno)系统、国际科学光学观测网(ISON)等大型地面光学设备网,完善对GEO目标的探测识别能力。欧洲以法国、德国的雷达和光学设备为主,主要对过境欧洲的LEO目标进行探测、跟踪与识别。
目前,国内对国外空间目标探测与识别系统已有相关研究,但是缺乏对其发展现状的系统性总结分析[1-3]。本文从天基与地基、雷达与光学的分类角度,介绍了美国、俄罗斯、欧洲空间目标探测与识别系统的发展现状,总结分析发展趋势,可为我国在该领域的发展提供参考。
1 美国
美国用于空间目标探测识别的空间监视网(SSN)是目前世界上最大的空间态势感知网,包含地基系统和天基系统两部分,每天进行380 000~420 000次空间观测[4]。
1.1 地基系统
目前,美国SSN地基系统由30多部雷达、光学系统及指挥控制中心组成,可对10 cm以上的LEO目标、1 m以上的GEO目标进行跟踪。为进一步提升探测识别性能,美国正在发展新型空间篱笆设备,升级或转移部署SST等旧设备。
1.1.1 地基雷达系统
目前,美国用于探测识别的地基雷达系统基本实现了全球布站,包括低频雷达、高频雷达、高低频兼具雷达,可对LEO和GEO目标进行初轨探测、精确定轨、窄带成像识别和宽带逆合成孔径雷达(ISAR)成像识别等。
为提升地基雷达系统的探测识别能力,美国近年来开展了多方面的工作:①发展新型S频段空间篱笆雷达[5];②转移部署C频段雷达;③升级部分地基SSN雷达系统性能;④提升导弹预警系统的空间目标监视能力。
1)发展新型S频段空间篱笆雷达
为提升SSN地基雷达系统的探测识别能力,扩大对空间目标的监视范围,增加对空间目标的探测容量,提高对空间目标的探测精度和时效性,特别是提高对小型空间目标的探测能力,美国于2012年正式发展新型S频段空间篱笆大型相控阵雷达。新型空间篱笆建成后,将取代美国在2013年9月关闭的甚高频(VHF)空军空间监视系统(AFSSS)。
新型空间篱笆夸贾林站计划于2018年投入使用,建成后将成为美国空军最大的雷达(650 m2),设计寿命为25年。空间篱笆澳大利亚站预计在2021年建成使用,与夸贾林站共同提供互补式空间监视覆盖。每个观测站的空间篱笆将每天对空间目标进行超过150万次探测、跟踪与编目,使SSN目标编目能力提高10倍,达到20万个,GEO目标跟踪量级可达到10 cm,LEO目标跟踪量级可达到1 cm。
新型空间篱笆相控阵雷达使用元件级数字波束成形(DBF)技术,能产生多个同时作用的独立雷达波束,可在相同的工作频段内以不同的频率模式工作,使雷达具备灵活覆盖能力。空间篱笆可在不影响日常监视能力的前提下,对全轨道任意重点目标进行及时探测跟踪。例如,可利用长弧段跟踪,对未知空间目标进行初轨确定与空间编目,同时可产生电子“微篱笆”,对重点目标进行持续跟踪。另外,可根据用户需求自动调节雷达束数量和覆盖范围,以获取任务所需的“微篱笆”。空间篱笆使用氮化镓功率放大器产生高能长脉冲,探测跟踪远距离空间目标,增强空间态势感知能力。表1为空间篱笆主要性能参数[6]。
2)转移部署C频段雷达
为进一步增强对南半球及西太平洋上方LEO目标的探测识别能力,美国从2014年开始将原本部署在加勒比海的安提瓜岛的C频段雷达逐步迁移至澳大利亚西部哈罗德霍尔特海军通信站。2017年3月,C频段雷达获得全面运行能力。
C频段雷达是AN/FPS-14型单脉冲碟形机械跟踪雷达,工作频段5.4~5.9 GHz,探测距离达11 000 km,专用于空间目标监视,每天可准确跟踪约200个目标,还可以识别卫星特征、确定卫星轨道、探测卫星的潜在异常。作为首个部署在南半球的SSN传感器,C频段雷达尽管数据容量有限,但可提供非常精确的卫星定位数据和特征描述数据,提高美国对东、南半球空间目标的探测跟踪与识别能力。
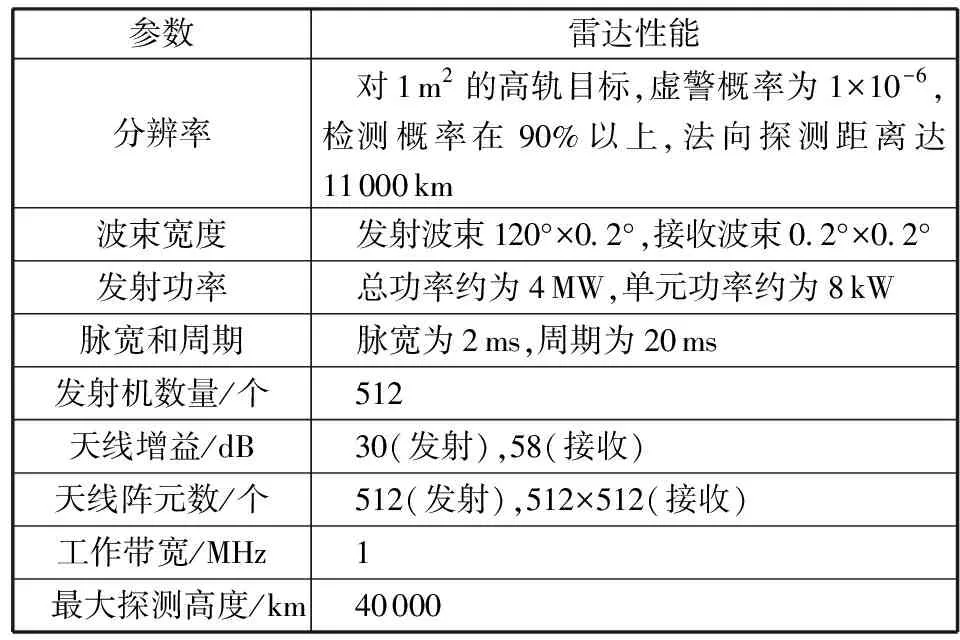
表1 空间篱笆主要性能参数
3)升级部分地基SSN雷达系统性能
近年来,为解决多数SSN地面传感器软硬件老化和空间监视能力不足的问题,美军通过延长使用期计划(SLEP)更新旧设施,例如升级并延长埃格林AN/FPS-85雷达、干草堆超宽带卫星成像雷达(HUSIR)、地球仪-2(GLOBUS-2)雷达设施,以维持关键的空间态势感知能力。升级后的AN/FPS-85雷达采用现代软件体系结构,能提供LEO厘米级和深空目标探测识别的能力。升级后的HUSIR雷达增加了W频段,成像识别能力从25 cm提高到1 cm,并支持空间目标特征描述。另外,从2017年起,美军通过开启地面雷达升级(GRU)项目研发L频段高功率雷达系统,并对特高频(UHF)雷达进行操作升级,以提升对常驻空间物体(RSO)的跟踪编目能力。
4)提升导弹预警系统的空间目标监视能力
美国不断提升导弹预警系统的空间目标监视能力与部署数量,使预警雷达承担大量的空间目标探测任务,便于使专用型空间目标监视设备进行精确定轨与目标识别等高级任务。目前,除了早前部署并升级的L频段丹麦眼镜蛇雷达、P频段相控阵雷达外,美军还在全球部署多部具备较强空间探测目标识别能力的X频段雷达,包括前沿部署可机动X频段(FBX-T)雷达、海基X频段雷达、GBR-P雷达。另外,美国30多艘宙斯盾舰上的S频段雷达也具备一定的空间目标探测跟踪能力。
1.1.2 地基光学系统
美国地基光学系统包括3部地基光学深空监视系统(GEODSS)专用望远镜、1部专用SST和5部毛伊岛空间监视系统(MSSS)协助望远镜,主要用于探测识别深空目标。美国为提升地基光学系统的探测识别能力,不仅对GEODSS进行全面升级,还将SST转移部署至西澳大利亚,增强对南半球和亚洲的监视覆盖。
1)全面升级GEODSS系统
GEODSS系统在夏威夷、印度洋、新墨西哥州3处布站,每个站上装备2台主镜和1台副镜。主镜为1 m口径的里奇-克莱琴(R-C)反射镜,焦距为218 cm,视场角为2°,主要用来搜索星等较低、运动较慢的高轨目标,并具有对夜空2400 km2/h探测能力。副望远镜为施密特相机,口径为38 cm,焦距为76 cm,视场为6°,用于大范围观测运动较快的低轨目标,具有15 000 km2/h搜索能力。GEODSS最早采用恒星工作模式,但是测量精度不高。后来,美国对GEODSS系统进行全面升级,替换老化的传感器控制组(SCG)、数据处理组(DPG)、数据通信组(DCG),以维持对GEO目标和深空目标的跟踪能力。升级后的GEODSS采用科学级CCD,像元尺寸24 μm,CCD像素1960×2560,能实时探测、跟踪、辨识轨道高度为5600~40 000 km的空间目标,GEO目标分辨率为30 cm[7]。
2)转移部署SST
SST采用梅森-斯密特同轴三反光学系统,采用曲面拼接薄膜焦平面CCD,口径3.5 m,焦距3.5 m,视场角6°,每天能观测到21 600个目标,可实现宽视场清晰成像。SST是目前世界上探测最敏捷的大型望远镜,使用世界最快的望远镜相机快门,同时采用电机驱动,可快速稳定探测深空目标,具有广域空间探测与识别能力。SST主要作用于GEO区域,目标分辨率为10 cm,一晚能对整个GEO进行多次观测,提升现有设备深空观测能力,从一次只能观测到少量大型空间目标升级至一次性观测到10 000多个空间目标[8]。图1为SST构型。
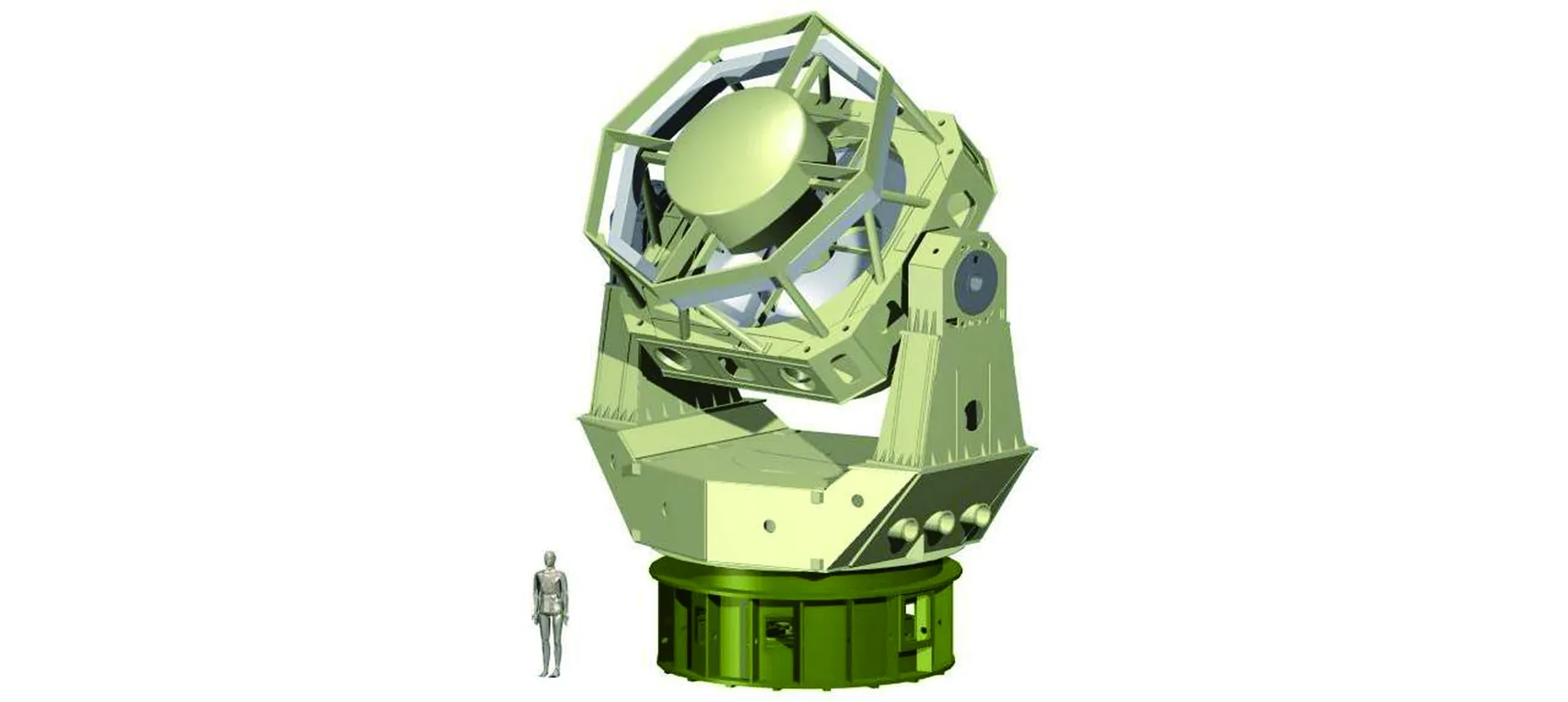
图1 SST构型Fig.1 SST configuration
为增强对西太平洋和印度洋上空及南半球空间目标的探测能力,美国正将SST转移至澳大利亚西部哈罗德霍尔特海军通信站。在转移之前,美国国防高级研究计划局(DARPA)对SST的微弱目标监测算法及搜索速度进行了升级。2016年10月,DARPA将SST系统交付于美国空军太空司令部,正式启动转移工作。升级完成后,SST在2016年完成1000余万个空间目标探测。预计SST将在2020年完成重新组装、校准工作,并具备初始运行能力。
1.2 天基系统
地基系统受地球曲率、云层遮盖等诸多限制,为避免其探测缺陷,扩大探测区域,美国还在发展高低轨配合的天基系统,重点提升对GEO目标的监视侦察能力。表2为美国目前在轨运行的空间目标监视卫星基本情况,其有效载荷都采用光学设备。

表2 目前在轨运行的美国空间目标监视卫星
1)SBSS卫星
SBSS是美军为增强实时空间态势感知能力而研制的,SBSS-1卫星已于2010年9月发射。它可编目1.7万个直径大于10 cm的空间目标,跟踪800多颗在轨卫星。SBSS-1卫星采用口径30 cm的光学遥感器,具有240万像元分辨率,且遥感器安装在两轴万向架上,可通过万向架的转动改变其观测角度(达到3π立体角)和方向,能够快速、灵活地发现和跟踪目标。因此,SBSS-1卫星兼顾宽视场搜索和精确测量的性能指标要求,提供全天候、近实时的空间态势感知数据,满足LEO和GEO目标探测编目及成像识别等多种任务需要。同时,SBSS-1卫星遥感器杂光抑制性高,采用三反离轴系统调焦机构、滤光盘以及焦平面列阵等部件,可对太阳光照射下的地球临近区域进行探测。
2015年1月,美国空军宣布启动天基空间监视系统后续计划(SBSS FO),计划用3颗卫星组成的星座接替现有的SBSS-1卫星,以增大覆盖面积,缩短目标重访周期。2016年7月,美国空军对SBSS FO的功能和进展情况进行了简要介绍,但并未公布卫星设计方案、技术参数等详细信息。SBSS FO将重点关注高价值空间资产与深空目标的搜索、跟踪与数据采集。美国空军计划在2020年完成SBSS FO关键设计评审,并于2022年发射达到全面运行能力(FOC)。2017年12月8日,美国称暂停了SBSS FO项目,并表示与美国国家侦察局(NRO)合作研发能够满足未来空间态势感知需求且成本更低的卫星。
2)ORS-5卫星
SBSS-1卫星预计可运行至2020年左右,为弥补SBSS-1卫星退役之后存在的能力空档期,美军委托MIT林肯实验室研制ORS-5卫星,验证低成本GEO空间态势感知技术。该卫星已于2017年8月26日发射,进入600 km高的赤道轨道。
ORS-5卫星是低成本、高自主化的小型卫星,长约为1.5 m,质量约为113 kg,可对GEO目标持续观测,观测周期为104 min,每天约15次收集目标的跟踪信息。它采用几何优化太空望远镜(GeOST)概念,可实现快速、连续、无提示的GEO目标搜索与成像识别。ORS-5卫星在赤道低轨道上运行,遥感器指向自身位置前方的GEO目标,卫星运动方向与遥感器指向之间呈现“魔力角”,保证恒星在视场内固定,以对穿越视场的GEO目标进行识别。选择适当的“魔力角”,使ORS-5卫星垂直于其视线的速度与目标垂直于视线的速度相同,这一特殊的轨道几何形状可使目标图像在ORS-5卫星遥感器上保持暂时不动,从而增加目标跟踪积分时长,以收集更多的目标信息。同时,ORS-5卫星采用新型飞行几何模式与遥感器时间延迟积分技术相结合,可对GEO目标进行连续成像[9]。图2为ORS-5卫星“魔力角”示意。
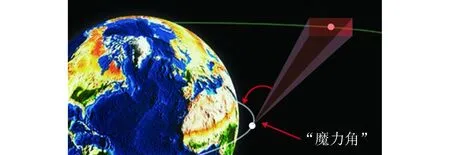
图2 ORS-5卫星“魔力角”示意Fig.2 Magic angle of ORS-5 satellite
3)GSSAP卫星
GSSAP卫星是美国空军发展的高轨巡视卫星,目前已完成4颗卫星组网,提升了美国对GEO卫星的持续监视与抵近识别侦察能力。
GSSAP卫星采用万向架侦察相机,既能通过与GEO目标的相对漂移实现GEO全轨道巡视探测,对空间目标进行探测、编目和特征识别;还能通过转动的万向架对特定目标进行多角度立体观测;必要时还能通过轨道机动抵近GEO目标进行详细侦察,在最佳观测距离和最优拍摄角度获取目标高清视图[10]。目前,美国并未透露GSSAP卫星的相关技术细节和未来发射计划。据推测,GSSAP卫星可能具有灵活的高轨机动能力,搭载高分辨率遥感器与高性能电子窃听设备,可按需对GEO目标进行抵近“拍照”与“窃听”,能够在最佳位置清晰拍摄目标外形并跟踪机动目标,也能够跟踪目标发射的无线电信号以获取其通信信息。
加拿大观测卫星-L(SeeSat-L)卫星观测跟踪小组曾公布GSSAP-1/2卫星的观测信息。GSSAP-1卫星的GEO全轨道相对漂移速度为0.5~1(°)/d,GSSAP-2卫星的GEO全轨道相对漂移速度为0.25~0.33(°)/d。据此计算:GSSAP-1在距离GEO的40~80 km运行,GSSAP-2在距离GEO的20~25 km运行,可能为巡视探测方式;GSSAP-1/2卫星平时运行在近地球同步的椭圆轨道上,对GEO全轨道目标进行监视侦察;在执行特定任务时,按需求通过轨道机动抵近目标,进行详查拍摄或窃取通信信息。
2016年8月,美军曾对GSSAP-1/2卫星进行机动变轨,抵近详查美国海军故障卫星移动用户目标系统-5(MUOS-5),以确定故障原因(该卫星轨道提升推进系统于2016年6月底发生故障,卫星偏离目标轨道16 100 km)。美国未公布GSSAP拍摄的图像,但称目标图像分辨率达厘米级,能清晰查看目标的天线和遥感器。
2 俄罗斯
俄罗斯空间监视系统(SSS)是世界上第二大空间监视网,主要由地基雷达系统和地基光学系统组成。截至目前,俄罗斯尚未发展专用空间监视卫星,主要依靠地基空间监视系统,当前可对12 000多个空间目标进行探测和编目管理。由于受地面测站经纬分布等限制,SSS对部分(0°W~160°W)高轨目标、小倾角低轨目标(倾角小于50°)和远地点在南半球的中高轨目标等的探测能力有限,也不能达到全天时、全天候的要求。
2.1 地基雷达系统
地基雷达系统主要包括地基预警雷达网与部署在北高加索地区的专用型X频段空间监视雷达,分布在俄罗斯境内或以前的苏联加盟国境内,主要对俄罗斯全境附近、美国、中国、北极等国家和地区进行导弹预警和空间目标监视。表3为SSS地基雷达系统参数与相关进展(截至2017年底)[11]。
俄罗斯为增强对空间目标的探测跟踪与监视识别能力,正在发展新一代沃罗涅日雷达系统。该系统采用模块化设计,可通过更换设备模块迅速完成日常维修和系统升级,以保持最先进的技术性能。其中:沃罗涅日-VP雷达采用EHF,工作频率高达30~300 GHz;沃罗涅日-SM雷达采用S~X工作频段,工作频率高达2~12 GHz,可能会用于目标识别。总体来说,目前SSS主要用于对低轨目标的探测、跟踪,很少有宽带雷达对空间目标进行识别,也没有作用于高轨目标的雷达系统。不过,俄罗斯正在发展具有目标识别能力的新一代高频沃罗涅日雷达系统,预计到2020年可取代旧系统。图3为沃罗涅日-M雷达。

图3 沃罗涅日-M雷达Fig.3 Voronezh-M radar
2.2 地基光学系统
俄罗斯主要依赖Okno系统、国际科学光学观测网(ISON)等地基光学设备探测识别深空目标。这些光学设备在俄罗斯境内及全球范围内广泛布站,其望远镜口径类型多样,作用轨道范围广。
Okno系统由14个子站的20多套光学观测设备组成,位于塔吉克斯坦帕米尔高原,夜间能探测2000~40 000 km轨道范围内的空间目标,可根据待观测空间目标的高度调整空间分辨率和观测视场。其望远镜口径范围为45~100 cm,分为短距望远镜、普通望远镜和远距望远镜,有能力观测LEO和GEO的目标。Okno系统可把收集到的各类信息汇集至地面中央计算机中,通过自动剔除无用信息精确定轨并识别空间目标。为进一步提升能力,俄罗斯计划在2018年前订购10套以上Okno-S新型光学空间监视系统,部署在阿尔泰及滨海边疆地区。
ISON是俄罗斯科学院管理运行的光学望远镜网络,由俄罗斯、乌克兰、西班牙、瑞士、美国等十几个国家的30多个观测站组成,包括直径12.5 cm~2.6 m的80多个不同类型的望远镜。ISON可对整个GEO进行持续监测,定期观测莫尼亚轨道区域,并跟踪全轨道空间目标,同时也能对小行星进行天文观测。
近期,俄罗斯又恢复重建树冠侦察系统,将地基光学系统与地基雷达系统配合使用,其中,雷达系统提供光学系统跟踪所需的指向数据,而光学系统主要完成对空间目标的跟踪、精确定位与识别。树冠系统能够扩大跟踪目标的轨道倾角与高度范围,增强对微小目标的探测识别能力。树冠系统包括树冠和树冠-N两部分。树冠位于北高加索地区,由2个大型光学望远镜、1个激光定位雷达、1个大型分米波VHF射频雷达和1个厘米波UHF射频雷达组成。其中,UHF射频雷达有5个可轮换的抛物面天线,用于基础干涉测量,可对空间目标进行探测定轨、特征描述与识别。树冠-N位于俄罗斯远东地区,主要用于探测跟踪LEO目标。目前,树冠系统已结束深度改造,可对目标进行精确定位和识别。
3 欧洲
欧洲正积极开展欧洲空间目标监视系统的建设,并考虑将欧洲各国现有的空间监视设施进行联网,基于法、德两国现有的雷达网络,建设独立、完善、一体化的欧洲空间目标监视系统(ESSS)。
3.1 地基雷达系统
欧洲ESSS地基雷达系统(见表4)较少,主要以法国空间监视广域网络(GRAVES)雷达、德国跟踪与成像雷达(TIRA)设备为主,法国蒙日(Monge)跟踪船上的阿莫尔(ARMOR)雷达、英国奇尔波顿(Chilbolton)雷达等其他雷达设备作为补充[12]。ESSS地基雷达系统主要采用低频工作模式,对过境欧洲的LEO目标进行探测跟踪,探测能力达到低轨2厘米级。TIRA雷达具有高频工作模式,可对空间目标进行成像识别。其中:法国ARMOR雷达使用高分辨率角度和距离数据执行空间目标跟踪任务,可全天候、不间断地对LEO和GEO目标进行探测识别;英国S频段Chilbolton雷达主要用于大气和电离层研究,兼具600 km空间目标的跟踪能力。

表4 ESSS地基雷达系统
此外,德国航空航天中心(DLR)还正在研制德国试验监视与跟踪雷达(GESTRA),预计在2018年中期建成。GESTRA雷达采用准单体设计,半固定式地集成在18 m×4 m×4 m的容器中,可移动。GESTRA产生L频段高脉冲输出,能够灵活观测到高度在300~3000 km的空间目标。雷达发射器和接收器均配有安装在3D定位器上的大型相控阵天线,能在几毫秒内旋转至任意所需位置。雷达使用数字多波束形成方法,利用高性能处理器和先进算法形成高速数据流,同时实时合成多个天线波束,使雷达可以同时观测不同方向。此外,GESTRA也可以在扫描模式下对特定目标进行跟踪。GESTRA雷达还具有可扩展性,非常适合未来集成扩展成雷达网[13]。
3.2 地基光学系统
欧洲各国也在不断发展地基光学系统,提高空间目标的定轨精度及识别效率。目前,欧洲的地基光学系统包括ESA空间碎片望远镜,法国天空观测系统(SPOC)、瞬态目标速动望远镜(TAROT),德国灵巧网(SMARTnet),瑞士ZIMLAT望远镜,英国无源成像测量传感器(PIMS)望远镜等,主要分布在欧洲、南美洲和澳大利亚等地,有宽视场探测跟踪望远镜,也有窄视场目标识别望远镜,主要用于探测GEO目标,GEO目标空间分辨率已达到10 cm,部分设备还有激光观测功能,增加夜视观测能力。
ESA空间碎片望远镜(见图4)位于西班牙,采用孔径1 m的蔡司镜头,视场为0.7°,能覆盖GEO上120°的扇区,探测跟踪15 cm直径的GEO目标,通过单次观测推断出目标的原始轨道,并由此来完善轨道数据。

图4 ESA空间碎片望远镜Fig.4 ESA Space Debris Telescope
法国SPOC和TAROT分布在法国、智利和澳大利亚。SPOC是50°×50°宽视场望远镜,在晴朗夜晚可探测到100~400个目标。TAROT系统有0.25 m和1 m口径的望远镜,视场角分别为4°和0.1°,焦距分别为0.8 m和8 m。0.25 m口径望远镜用于目标探测跟踪;1 m口径望远镜用于目标识别,能够快速(大于60(°)/s)、高精度指向空间任意目标,每月可执行17 000多次GEO目标观测[14]。
4 发展趋势分析
美国、俄罗斯和欧洲等国家和地区都在发展雷达、光学等不同类型的空间目标探测与识别系统。美国的空间目标探测与识别系统不仅在全球范围内布站,也正在建立高低轨结合的天基探测识别系统,其探测范围广,设备种类全。俄罗斯的空间目标探测与识别系统主要分布在俄罗斯境内及附近地区,对过顶俄罗斯境内、周边地区及北极地区的空间目标进行探测,部分地基光学系统在欧洲和亚洲等地分布。欧洲各国共同协作开发各类空间目标探测与识别系统,以法国和德国为核心共同建立ESSS,为欧洲各国提供服务。
根据前文对国外空间目标探测与识别系统的发展现状研究,可以获得以下发展趋势。
(1)地基雷达系统是低轨目标探测识别的主要设备,国外通过发展新型高频雷达、升级旧雷达至高频等多种方式,提升雷达的空间目标识别能力。例如:美国开发新型S频段空间篱笆,升级HUSIR雷达增加W频段,在全球范围及多艘宙斯盾舰上部署多部S频段、P频段、X频段雷达,大大增强成像识别能力。俄罗斯大力发展新型S~X频段沃罗涅日-SM雷达,探测距离扩展至10 000 km。欧洲TIRA雷达、ARMOR雷达、Chilbolton雷达分别采用Ku、C、S的高频探测。各国大力发展雷达高频探测识别技术,一方面是因为高频雷达的波长短,穿透力强,配合雷达的大功率发射、合成等技术,可以实现对较远、较小空间目标的探测;另一方面,通常高频雷达的带宽较宽,可获得更丰富的雷达回波信息,具有距离分辨率高、目标测量精度高、杂波中目标检测性强、抗干扰能力强等特点,可实现对空间目标的精确识别。
(2)地基光学系统是高轨目标探测识别的主要设备,随着对高轨目标探测要求尺寸越来越小,其对地基光学系统搜索探测能力和成像观测分辨率要求也越来越高。目前,国外空间目标探测光学系统围绕暗弱目标探测和高清晰成像2个技术目标快速发展,具体有如下3种实现方式。①通过发展大口径望远镜技术提升空间目标分辨率。大口径望远镜可以提升观测集光能力,观测暗弱目标,并提高分辨率,例如美国SST口径达3.5 m,俄罗斯ISON望远镜最大口径达2.6 m,法国SPOC光学系统望远镜口径也达到3.5 m。②通过发展大面阵曲面CCD探测技术提升宽视场清晰成像能力。随着望远镜口径的增加,平面焦面的焦距小,可能会造成望远镜成像失真,降低空间目标的分辨率。但是,SST采用大面阵曲面CCD探测技术,将12个薄膜CCD安装在5.44 m的球面上,形成弯曲的焦面,在扩展望远镜视场角的基础上显著提高望远镜焦距,同时实现大数据量观测与宽视场清晰成像。③通过发展光学与雷达、激光结合探测技术,提升空间目标识别能力。目前,地基光学系统通常存在观测视场小、不能全天候工作的缺陷,需要通过地基雷达探测与激光探测的配合,提高探测识别能力。将光学探测与雷达探测相结合,需要地基雷达系统事先对空间进行扫描探测,获得探测数据后,地基光学系统根据数据导引进行空间目标的跟踪识别。例如:俄罗斯Okno系统就采用大型光学望远镜与VHF分米波雷达、UHF厘米波雷达相结合的方式,提升对空间目标的探测定轨与特征识别能力。此外,可以将光学探测与激光探测相结合,这样不仅可以进行辅助激光测距定位,还可以扩展观测时长。激光发射器在夜间照射空间目标,能够辅助光学望远镜进行全天时观测成像。
(3)天基设备是目前新型的探测识别设备,可以利用天基系统的优势对重要目标进行高精度定轨与高分辨率成像,避免可能发生的空间碰撞,或者针对己方存在威胁的目标做出提前警示,具有很重要的军事价值,是未来发展的重点方向。天基空间目标探测技术发展如下。①轨道机动与在轨观测技术。天基遥感器可以利用其独特的轨道优势对空间目标进行近距离、长时间成像观测。例如:位于GEO上的GSSAP卫星通过与GEO目标的相对漂移实现GEO全轨道巡视探测,对空间目标进行编目与特征识别,通过抵近GEO目标进行详察,在最佳观测距离和最优拍摄角度获取目标高清视图;位于LEO上的ORS-5则采用GeOST,配合延时积分技术,增加目标跟踪时长,对目标进行凝视识别,实现更灵敏的成像,能收集更多GEO目标信息。②多角度立体观测技术。SBSS-1、GSSAP卫星均采用万向架支撑光学遥感器,通过万向架的转动改变遥感器的观测角度和方向,快速灵活发现目标,并对目标进行多角度立体成像。③杂散光抑制技术。天基观测时其背景杂光非常复杂,若要观测高星等暗弱目标,需要对杂散光进行抑制,从而提高空间目标的探测效果。例如,美国SBSS-1卫星遥感器采用三反离轴系统调焦机构、滤光盘及焦平面列阵等部件,提高杂光抑制效果,增强对暗弱小型目标的探测能力,有助于发现未知的空间目标。
5 结束语
随着空间目标探测尺寸的要求不断缩小,国外越来越重视空间目标探测识别的高分辨率与实时性,通过发展高频雷达探测、大面阵CCD探测等关键技术来提升探测性能。同时,国外空间目标探测与识别系统也充分结合光学探测、雷达探测与激光探测的优势,提供更准确多样的跟踪、精确定位与识别信息,提高观测时长与观测实时性。此外,美国还建立了高低轨互补的天基设备,充分发挥独特的轨道优势,实现抵近侦察观测、增加跟踪凝视时间,在最佳位置获取目标的高清图像,进一步提高空间目标的分辨率,根据不同的需求调整天基设备的轨道位置对特定目标进行探测与识别。目前,国外GEO目标探测的分辨率已达到厘米级,且观测时效性较高。国外在系统空间分辨率进一步提升的基础上,还在继续发展不间断连续观测与实时观测能力,提升空间目标识别能力,以满足保障空间安全的更高要求。
借鉴国外空间目标探测与识别系统的发展趋势,建议我国建立雷达和光学相配合的空间目标探测与识别系统,结合雷达系统和光学系统的优势,利用有限的探测识别资源,最大化探测识别系统的能力。体系化发展空间目标探测识别系统,进一步发展以光学探测为主的高低轨结合的天基系统,同时利用地基系统的观测数据,对空间目标进行近距离、近实时、高清成像观测,从而实现空间目标天地一体化的探测与识别。
参考文献(References)
[1] 李颖,张占月,方秀花.空间目标监视系统发展现状及展望[J].国际太空,2004(6):28-32
Li Ying, Zhang Zhanyue, Fang Xiuhua. Development and future of space surveillance system [J]. Space International, 2004(6): 28-32 (in Chinese)
[2] 李焱,康开华.美国空间监视系统最新发展及趋势分析[J].航天器工程,2008,17(2):76-82
Li Yan, Kang Kaihua. Research and analysis on deve-lopment of US space based surveillance system [J]. Spacecraft Engineering, 2008, 17(2): 76-82 (in Chinese)
[3] 王建立.空间目标地基光电探测与识别技术的发展[J].飞行器测控学报,2015,34(6):489-499
Wang Jianli.Development of technologies for detection and identification of space objects with ground-based E-O systems [J]. Journal of Spacecraft TT&C Technology, 2015, 34(6): 489-499 (in Chinese)
[4] United States Space Command. Space surveillance [EB/OL]. [2018-04-10].http://www.au.af.mil/au/awc/awcgate/usspc-fs/space.htm
[5] Lockheed Martin. Space Fence solution [EB/OL]. [2018-04-10]. https://www.lockheed-martin.com/us/products/space-fence.html, 2017-04-04/2018-04-10
[6] 孙宇阳,曾德贤,王夏男.空间目标监视雷达系统现状及发展趋势[C]//第二届中国空天安全会议论文集.北京:中国指挥与控制学会,2017:122-127
Sun Yuyang, Zeng Dexian, Wang Xianan. Status and trends of the space target surveillance radar system [C]//Proceedings of the 2nd Chinese Aerospace Safety Symposium. Beijing: Chinese Institute of Command and Control, 2017: 122-127 (in Chinese)
[7] Mostly Missile Defense. Space surveillance sensors: GEODSS (Ground-based Electro-Optical Deep Space Surveillance) system [EB/OL]. [2018-04-10]. https://mostlymissiledefense. com/2012/08/20/space-surveillance-sensors-geodss-ground-based-electro-optical-deep-space-surveillance-system-august-20-2012/
[8] Darpa. Space Surveillance Telescope (SST) [EB/OL]. [2018-04-10]. https://www.darpa.mil/program/space-surveillance-telescope
[9] Eoportal. ORS-5 (Operationally Responsive Space-5)/SensorSat [EB/OL]. [2018-04-10]. https://directory. eoportal.org/web/eoportal/satellite-missions/o/ors-5
[10] AFSPC. Geosynchronous Space Situational Awareness Program [EB/OL]. [2018-04-10]. http://www.afspc.af.mil/About-Us/Fact-Sheets/Article/730802/geosynchronous-space-situational-awareness-program-gssap/
[11] Russianforces. Early warning [EB/OL]. [2018-04-10]. http://russianforces.org/sprn/
[12] Tim Flohrer, Holger Krag. Space surveillance and tracking in ESA’S SSA programme [C]// Proceedings of the 7th European Conference on Space Debris. Paris: ESA, 2017: 1-6
[13] H Wilden, C Kirchner. Gestra-technology aspects and mode design for space surveillance and tracking [C]// Proceedings of the 7th European Conference on Space Debris. Paris: ESA, 2017:1-3
[14] Michel Bo⊇r, Alain Klotz. TAROT: a network for space surveillance and tracking operations [C]//Proceedings of the 7th European Conference on Space Debris. Paris: ESA, 2017:1-11
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
中学生数理化·八年级物理人教版(2022年11期)2022-02-14 06:37:40
地震研究(2021年1期)2021-04-13 01:04:56
中学生数理化·八年级物理人教版(2018年11期)2019-01-31 02:40:08
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
小哥白尼(趣味科学)(2018年6期)2018-09-14 06:10:58
摄影之友(影像视觉)(2017年12期)2017-02-08 02:10:02
CHIP新电脑(2016年3期)2016-03-10 14:07:52
火控雷达技术(2016年3期)2016-02-06 02:30:26
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34
