
多任务轨道光学遥感卫星推进舱设计
2018-07-06 08:50:08吴蓓蓓郝刚刚赵峭张立新管帅
航天器工程 2018年3期
吴蓓蓓 郝刚刚 赵峭 张立新 管帅
(北京空间飞行器总体设计部,北京 100094)
我国现有在轨低轨光学遥感卫星大都采用单组元推进系统,一般携带推进剂燃料不超过500 kg,相应的推进分系统也布置在卫星服务舱内[1-5]。但随着遥感卫星任务要求的发展,任务轨道开始从单一低轨圆形轨道向多种类型轨道拓展,卫星推进剂的携带量越来越大,达到吨级以上水平,为了提高燃料利用率减少推进剂质量,相对单组元更高比冲的双组元推进系统亦开始在低轨遥感卫星中使用。
随着航天器大规模研制和高密度发射的常态化,为降低研制成本和提高研制效率,对卫星产品的模块化和通用化设计势在必行,其中对卫星构形布局和结构设计也不例外。在卫星总体设计中,推进分系统的贮箱、管路和推力器等布局设计和承力路径设计是影响整星构形和承载路径设计的关键因素,燃料携带量越大,这种影响作用越加突出。贮箱等推进分系统相关设备因此开始被集中于一个单独的舱段或模块[6-7],形成模块化的可通用的推进舱段。基于该通用推进舱舱段,不同任务类型的卫星搭建不同的载荷舱段,完成整星的构形布局和承载路径设计。
基于光学遥感卫星多任务轨道需求和舱段模块化设计理念,本文设计出一种适应于多任务轨道光学遥感卫星平台的新型推进舱,在对多任务轨道光学遥感卫星燃料需求分析的基础下,对整星模块化设计、推进舱构形结构设计和模块化设备布局方案设计进行描述,最后给出了该推进舱设计试验验证情况(含静力试验和振动试验)并对推进舱模块化设计贡献进行总结。
1 多任务轨道光学遥感卫星燃料需求分析
光学遥感卫星的轨道设计需要兼顾成像性能、重访效能和长期轨道维持燃料消耗等要求,其运行的轨道可以设计成平时轨道和应急(任务)轨道两种类型,平时轨道一般为圆轨道,应急轨道可以是不同偏心率的椭圆轨道、不同轨道高度的圆轨道或天回归轨道等多种类型的任务轨道。
1.1 各型轨道特性
1)圆轨道
圆轨道是指偏心率接近0的轨道,当今世界上绝大多数遥感卫星采用圆轨道作为工作轨道。采用圆轨道的遥感卫星,卫星在不同位置的轨道高度基本保持不变,对于遥感载荷成像的图像质量保持一致是比较有利的。
2)天回归轨道
天回归轨道是指回归周期为1天的回归轨道。从天回归轨道的名称可知,卫星运行时其星下点轨迹均与前一天的星下点轨迹重合。采用天回归轨道,可以使遥感卫星对指定目标实现1天时间的快速重访,对于有快速重访需求的任务是十分有利的。但另一方面,天回归轨道相邻的星下点轨迹间距巨大,在卫星载荷幅宽和姿态机动能力有限的情况下,可实现对全球部分地区观测,不能对全球任意目标进行观测。
3)椭圆轨道
椭圆轨道是指偏心率大于0小于1的轨道,低轨椭圆轨道的高度范围在200~2000 km。随着卫星分辨率要求的提高和光学载荷孔径发展的限制,降低轨道高度成为低轨遥感卫星提高载荷分辨率的一种有效方式。全周期较低高度的圆形轨道由于受到低轨大气的影响寿命无法保证,因此开始采用近地点位于较低高度的椭圆轨道。椭圆轨道特性和优势如下[8]:
(1)椭圆轨道也可以同时具备太阳同步、回归特性。
轨道回归特性主要依赖于平均半长轴,在近地点高度确定后,可以通过调整远地点高度来改变轨道回归特性,易于满足对回归特性的要求。
(2)增大侧摆角度前提下,椭圆轨道重访特性可以与平均高度相同的圆轨道一致。
为了实现椭圆轨道与圆轨道同样的重访能力,需要在轨道高度低的地方提高卫星侧摆能力以增大卫星有效视场角,随着控制力矩陀螺部件的引入,使卫星侧摆能力大大提高。
(3)椭圆轨道可实现近地点高分辨率成像、远地点大幅宽成像。
椭圆轨道上各相位高度不同造成各处分辨率不同,可以实现近地点附近高分辨率成像、远地点相应低分辨率、大幅宽成像。
(4)椭圆轨道近地点周期漂移现象可实现以高分辨率对全球遍历成像。
考虑对近地点位置进行轨道控制需要的推进剂量较多,因此一般不做或少做近地点维持,而是利用此特性实现以高分辨率对全球遍历成像。
1.2 燃料需求分析
卫星燃料预算主要考虑初轨调整、轨迹保持、轨道机动和姿态控制所需的燃料消耗,轨道机动燃料消耗主要考虑卫星从平时圆轨道应急机动到椭圆轨道或天回归轨道等多种任务轨道的燃料消耗。
1)初轨调整
初轨调整包括轨道倾角i和半长轴a调整,调整半长轴Δa所需的燃料Δm可估计为[8]
(1)
式中,M为卫星质量;I为比冲;g为重力加速度;μ为地球引力常数。
调整倾角Δi消耗的燃料可以通过与调整Δa等效关系来估计[8]。
(2)
式中:u为纬度幅角。根据式(1)(2)可得初轨调整燃料消耗Δm1。
2)姿态控制
卫星姿态轨道控制仅在入轨早期阶段、轨控期间、或应急故障处置期间,姿态控制推力器需要工作,燃料需求较少,如20~40 kg即可。
3)轨迹保持
轨迹保持主要考虑轨道半长轴的维持,大气阻力摄动使轨道半长轴不断下降,从而导致实际的地面轨迹偏离标称轨迹的距离越来越远。由大气阻力引起的轨道半长轴变化率为[8]
(3)
式中:n为卫星运动角速度;CD为阻力系数;A为有效迎风面积;ρP为近地点大气密度;T0地球自转周期;e为轨道偏心率;H为密度标高;Ii是i阶修正贝塞尔(Bessel)函数。
轨道半长轴偏置量Δa可得[9]
(4)
式中:ΔL为星下点轨迹允许漂移范围;RE为地球半径。由式(1)(4)可得轨迹保持控制所需燃料消耗Δm3。
4)轨道机动
多任务轨道卫星不同的任务轨道之间的转移机动主要进行轨道半长轴、偏心率和近地点幅角的调整,而偏心率和近地点幅角的调整可在轨道半长轴调整的同时完成。因此,对于不同任务轨道之间的轨道机动的燃料需求,主要由半长轴的调整得到。
对于椭圆轨道和圆轨道之间的转移,通过沿速度方向的推力产生速度增量即可实现,在仅考虑沿速度方向的速度增量ΔVu情况下,半长轴的调整量Δa和速度增量ΔVu之间的对应关系如下:
(5)
式中:p=a(1-e2)为轨道半通径;θ为轨道的真近点角。
对于近圆轨道之间的转移机动,式(5)可简化为
(6)
式中:V为卫星的轨道速度。
根据得到的Δa,利用式(1)即可得到不同轨道之间机动转移所需的燃料消耗Δm4。
(5)总燃料估算
若初轨调整、姿态控制、轨迹保持、轨道机动的燃料需求分别为:Δm1、Δm2、Δm3、Δm4,整星总燃料消耗为
Δmp=Δm1+Δm2+Δm3+Δm4
(7)
表1列出了多任务轨道卫星燃料需求统计表,其中卫星参数设定为:干重3 t,寿命5年,I=290 s,阻力系数2.2,有效迎风面25 m2,从表1中可以看出大部分燃料消耗在低轨椭圆轨道的轨迹保持以及轨道转移机动上。低轨椭圆轨道的轨迹保持的年燃料消耗量随轨道高度的降低而增大;轨道转移机动的燃料消耗量随转移高度的增大而增大。

表1 多任务轨道卫星燃料需求分析(平时轨道500 km)
由于椭圆轨道的轨道维持燃料消耗以及平时轨道与应急轨道之间轨道转移所需燃料消耗均较大,考虑到在卫星寿命期间可能需要1~2次的不同轨道之间的转移以及较长时间的轨道维持,又鉴于应急模式及需求存在一定程度的差异和不确定性,并且考虑推进系统需要一定的余量以适应不同的遥感卫星。综合分析,确定多任务轨道光学遥感卫星推进舱的燃料携带量设计为1200 kg。
2 推进舱构形结构设计
2.1 整星模块化设计
传统遥感卫星构形按照功能划分为载荷舱和服务舱[10-12],但由于多任务轨道卫星等燃料需求的增大,卫星推进舱也开始成为卫星平台的重要功能舱段,整星模块化设计发生变化,如图1所示,自下而上依次为推进舱、设备舱和大型光学载荷3部分。其中,推进舱作为推进系统的承载舱段,不仅起到承载整星所有载荷的作用,还提供卫星与运载火箭的连接和分离接口以及对天指向的各类天线的安装接口,是卫星设计的关键舱段,另外也具备通用化、模块化设计的基础,是本文重点研究的对象。

图1 卫星模块组成示意图
为适应遥感卫星高分辨率载荷和高燃料承载需求,本文推进舱设计承载整星质量4200 kg(燃料质量1200 kg),相对传统遥感卫星承载能力大大提高。虽然卫星的总高度、质心及总质量均大于传统卫星设计状态,但是考虑将舱体结构横向尺寸增大,尤其是将作为主承力结构的推进舱承力筒结构的直径增大,经初步分析刚度和强度满足载荷约束要求。
2.2 推进舱构形结构设计
考虑卫星载荷和燃料承载要求,将推进舱舱体尺寸规划为φ2750 mm×1000 mm,是传统遥感卫星平台承力筒直径的2倍,如图2所示。按照选用常规四氧化二氮和甲基肼双组元推进剂核算,并联安装4个直径800 mm容积268 L的球形贮箱即可满足1200 kg燃料承载需求,当舱体高度扩展到1400 mm时,燃料承载能力可进一步扩展到2000 kg,详见表2。

图2 推进舱Fig.2 Propulsion module

项目短状态长状态外形尺寸ϕ2750mm×1000mmϕ2750mm×1400mm贮箱容积/L268×4528×4燃料质量/kg12002000
该推进舱由承力筒、贮箱支承构架结构和底板等主要部分组成,如图3所示。卫星推进舱承力筒继承传统遥感状态,采用成熟的蒙皮桁条结构,桁条数目与对接段数目一致,贮箱支承构架结构支承4个贮箱和推进管路系统,主要由贮箱安装支架和蜂窝夹层板组成的十字交叉构架组成,贮箱支架采用镁合金铸造和机械加工而成,蜂窝夹层板位于贮箱支架的下部,另一端与推进舱底板连接,在侧边通过角条与壳体内壁相连接。推进舱底板采用蜂窝夹层结构,其作用是将十字交叉构架连接成一整体,进一步提高它们的横向刚度,同时为天线等提供安装面。
推进舱坐标系定义如下:以承力筒下框端面中心为坐标系原点,X轴过坐标原点,位于承力筒下框端面内指向卫星飞行方向为,Z轴过坐标原点,沿承力筒纵向,Y轴位于承力筒下框端面内与,X、Z轴构成右手系。
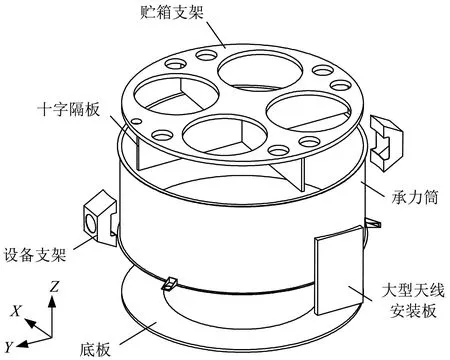
图3 推进舱结构Fig.3 Composition of propulsion module
2.3 推进舱外部接口设计
推进舱传力路径如图4所示,相机和设备舱所受的纵向/横向载荷直接传递给承力筒,最终由推进舱通过对接段传向运载。推进舱上安装的贮箱等设备的载荷,亦通过承力筒传递给对接段并传向运载。

图4 推进舱传力路径Fig.4 Sketch of propulsion module load transfer path
推进舱承力筒提供上部设备舱、下部对接段以及内部贮箱支撑结构的接口。推进舱与设备舱连接接口为分布于Φ2360 mm圆周上的螺钉连接孔(如图5所示),该处连接接头设计是整星载荷传递关键,根据其位置不同可以分为4类,不同承力接头最大轴向力载荷和安全裕度如表3所示,可以看出,各主承力接头均可满足强度要求。另外,推进舱各结构各部件安全裕度≥1.39,亦满足强度要求。
推进舱与下部对接段接口为新研2334型包带解锁装置(见图6)。按照此接口,单根包带的长度增长一倍,包带预紧力按照52 kN,由式(6)计算得到包带的最大载荷F为54 kN,对应包带的应力646 MPa远小于材料屈服强度,符合强度要求
F=Fp+1.5kFy
(8)
式中:Fp包带预紧力;kFy为包带上的附加动载荷;Fy为星箭接口处结构的附加动载;k为结构的相对刚度系数,1.5为附加动载的设计安全系数。

图5 推进舱与上部设备舱接口Fig.5 Interface between propulsion module and device module above

部件最大轴力/N许用载荷/N安全裕度是否满足要求1类主承力接头1070024000(类比)1.24是2类主承力接头2590079200(实测)2.06是3类主承力接头3380080000(类比)1.37是4类主承力接头444020000(类比)3.50是

图6 推进舱与下部对接段接口Fig.6 Interface between propulsion module and docking section below
2.4 推进舱结构轻量化设计
为了充分减轻卫星本体结构的质量,须对推进舱各部件进行减重设计。通过对贮箱支架支座开减轻槽、在承力筒上框和贮箱支架在非主承力接头位置开设减轻孔、推进舱底板蒙皮由铝合金改为碳纤维复合材料等方式减低结构质量。经轻量化设计,整个舱体结构质量180.7 kg,见表4。

表4 推进舱结构质量组成
3 推进舱设备布局方案设计
考虑舱体模块化设计需求,推进舱主要布局推进分系统设备,布局位置位于承力筒、贮箱支架、十字隔板和底板。布局方案设计应考虑焊装、热控实施、检漏测试、羽流等多方面的要求,分别进行羽流影响性和总装操作性仿真分析。
3.1 布局方案设计
综合考虑各方面要求,对该舱体采用集成式布局和分步式总装方案。除推力器、加排阀和贮箱以及气瓶别布局于承力筒和贮箱支架上外,推进分系统阀体设备集中布置在贮箱支架下十字支撑板上,底板上仅安装天线分系统设备,无推进分系统相关设备。
如图7所示,氧化剂贮箱和燃烧剂贮箱两两相对布置在贮箱支架四个象限内,气瓶穿过贮箱支架安装承力筒±Y侧内壁上。姿控推力器分4组安装在承力筒外表面上,另有8个姿控推力器分2组安装在推进舱±Y向隔板上,轨控轨控推力器安装在十字隔板中心处,考虑加注、排液要求,加排阀安装在承力筒外表面±Y侧,其余管阀件按模块布置在推进舱十字隔板8个安装面上,将对操作空间有较高要求的电爆阀安装在靠隔板两端或下侧的位置,避免贮箱的遮挡,如图8所示。整个管路在推进舱的走向如图9所示。
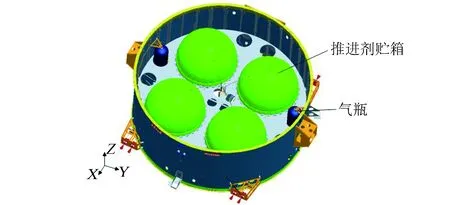
图7 贮箱和气瓶布局示意图Fig.7 Schematic of layout of tanks and cylinders
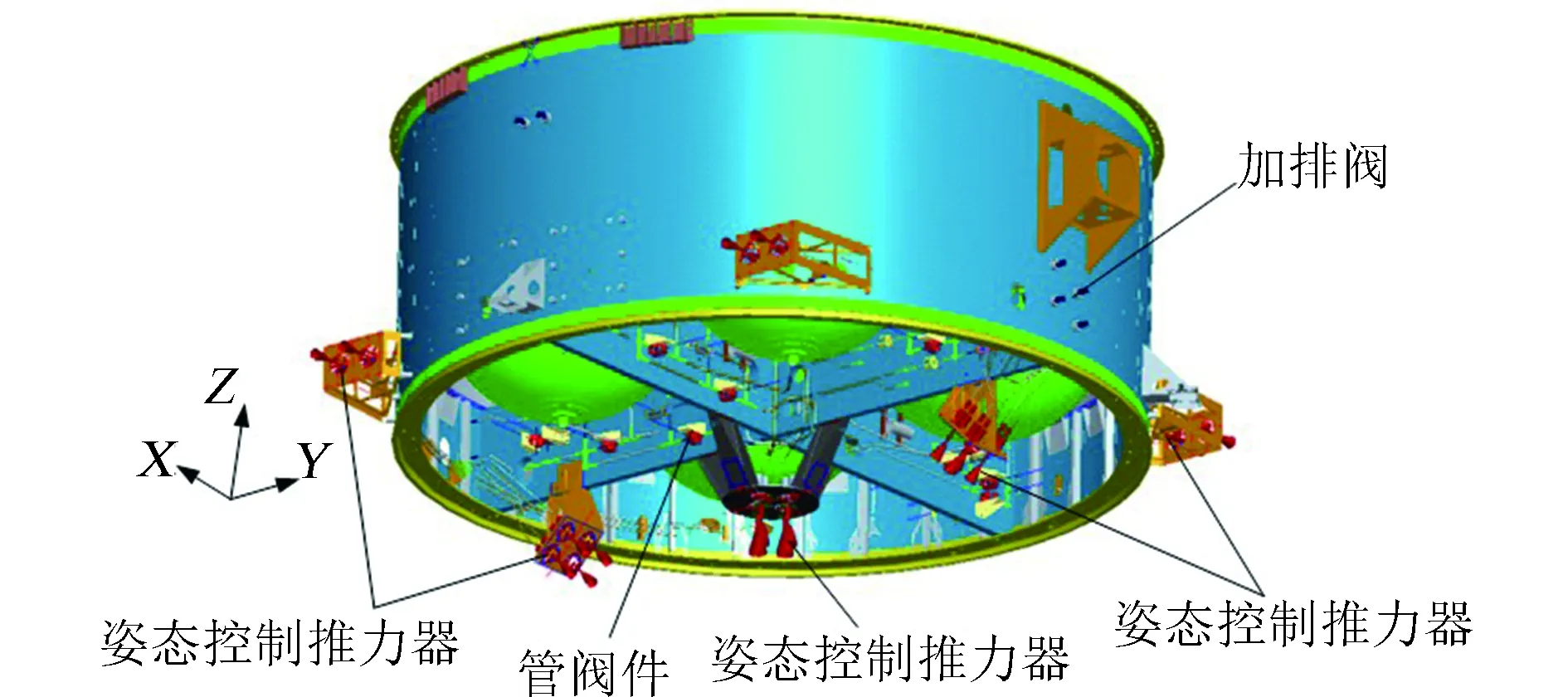
图8 推力器、管阀件布局示意图(隐藏底板)Fig.8 Schematic of layout of thrusters and pipe valves (panel at bottom hidden)

图9 管路布局走向示意图Fig.9 Schematic of layout of piping system
3.2 羽流影响分析
推力器羽流几何分析示意图如图10所示,除斜喷推力器会受到太阳翼包络的局部遮挡,其他均满足推力器30°半锥角范围内无遮挡要求,进一步利用PLUME软件进行羽流效应仿真分析,得到推力器布局方案满足羽流影响要求。其中,太阳翼转动过程中受到的羽流扰动力矩最大值0.438 Nm,热流密度和质量流密度最大值分别为0.23 kW/m2和7.08×10-5kgs/m2,大型天线转动过程中受到的羽流扰动力矩最大值0.69 Nm,热流密度和质量流密度最大值分别为1.37 kW/m2和3.78×10-4kgs/m2,上述扰动力矩相对于控制力矩可以忽略,热流密度和质量流密度值在遥感已发射卫星同类产品中普遍存在,经在轨验证均无影响。

图10 推力器羽流几何分析(按30°半锥角计算)Fig.10 Thrusters plume geometry analysis (calculated by half cone angle 30°)
3.3 总装操作性分析
该承力筒式结构具有高效的传力路径,但由于其封闭性,给总装操作带来较大的不便。通过推进分系统实施仿真分析,将推进管路系统焊装和检漏分两次进行,第一焊装时贮箱和底板均不安装,待完成除贮箱外的所有管阀件的焊装、检漏和热控实施工作后,安装贮箱进行第二次管路焊装、检漏和热控实施工作,最后管路焊装完成后安装推进舱底板,上述项措施有效解决了由于舱体封闭性带来的操作性困难。经仿真分析,设备布局和总装方案设计满足管路焊装、热控实施、检漏测试、羽流影响分析要求,自锁阀、压力传感器、电爆阀等布局亦满足电缆插拔、电爆管安装等操作性要求。
4 试验验证
4.1 静力试验
该推进舱经历静力试验考核,试验后检查结构没有任何异常,按照不低于鉴定级载荷的1.05倍进行超载试验,卸载后结构的应变和位移回零良好,说明结构没有损伤,仍具有承载能力。超载试验中典型位置的载荷位移曲线和载荷应变曲线如图 11所示。

图11 典型载荷位移曲线和载荷应变曲线Fig.11 Typical curves of displacement and strain with loads
4.2 正弦振动试验
推进舱舱结构设计亦经整星正弦振动试验考核,图12~14给出了推进舱关键部位在试验中的特征级和验收级响应曲线。从特征级力学试验看以看出整星横向一阶频率分别为14.8 Hz和15.3 Hz,纵向一阶频率在45.4 Hz,在燃料携带量增大的情况下整星基频仍与传统遥感卫星基频相当。从验收级响应曲线以及两次特征级响应曲线的对比结果可以看出,推进舱结构响应正常,验收级试验后结构性能无变化,满足结构强度设计需求。图15给出了贮箱安装处的加速度响应曲线,在主振方向加速度响应不超过10gn,满足单机环境试验条件要求。

图12 整星X向振动推进舱上框X向响应曲线
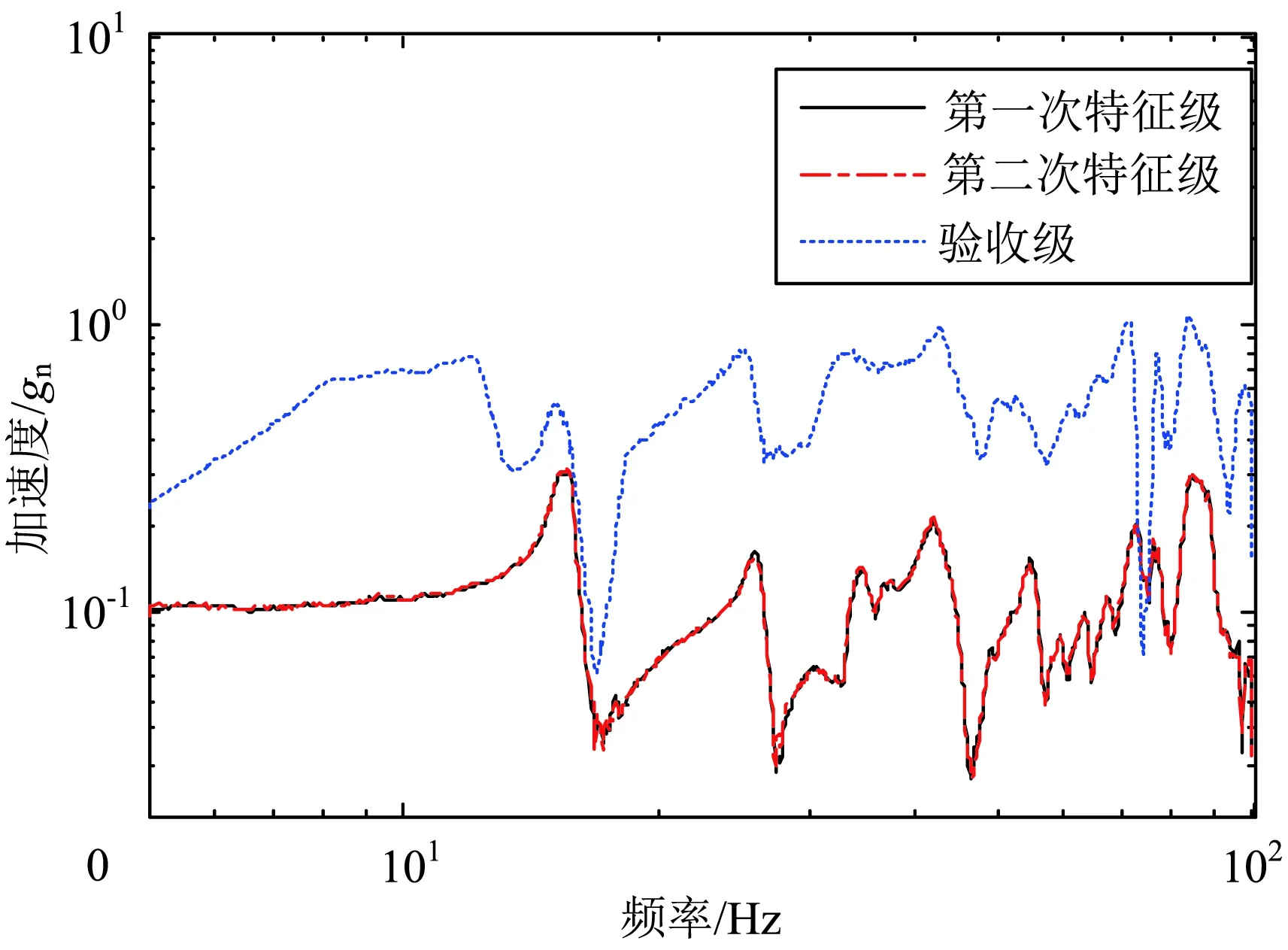
图13 整星Y向振动推进舱上框响应曲线
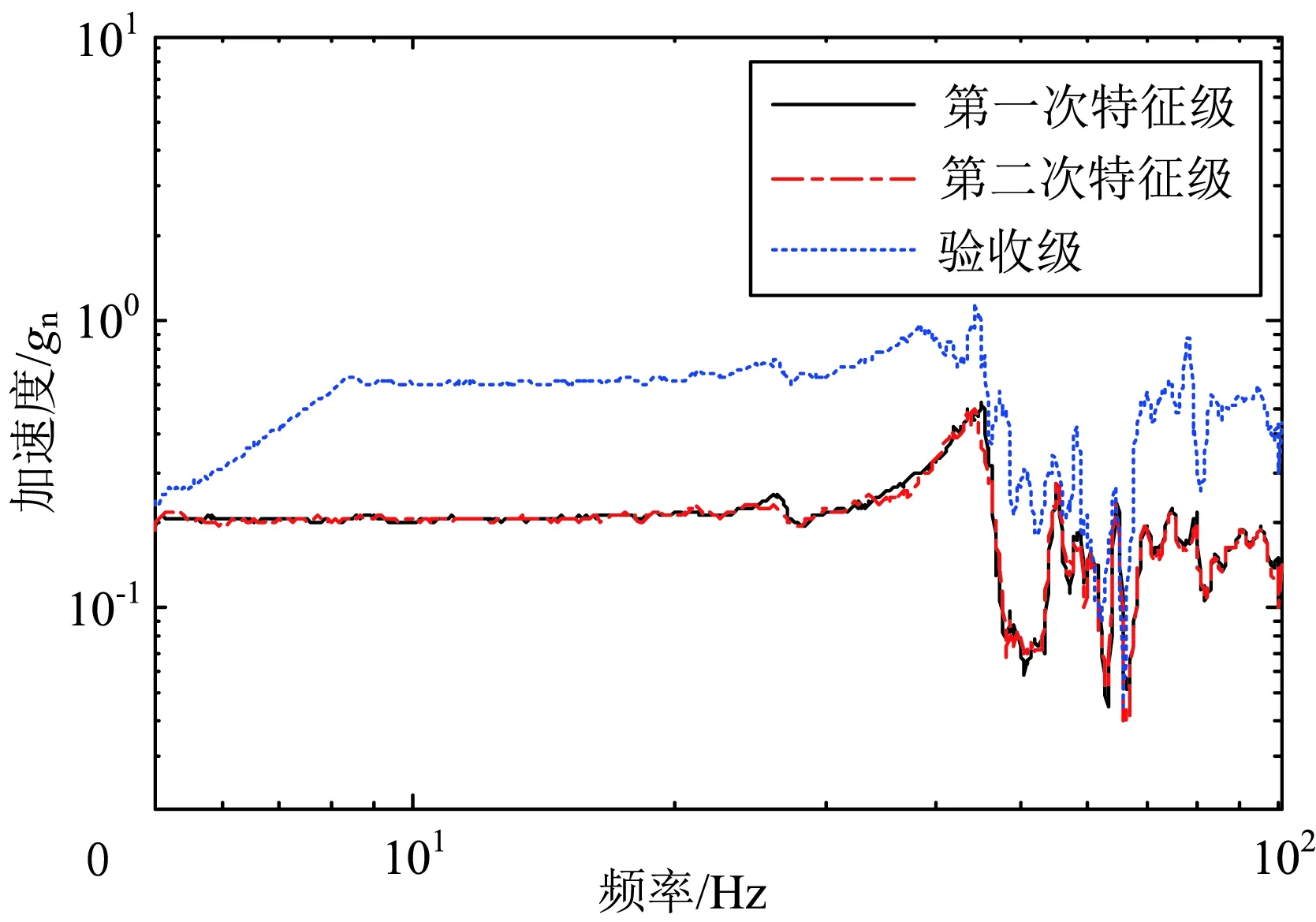
图14 整星Z向振动推进舱上框响应曲线
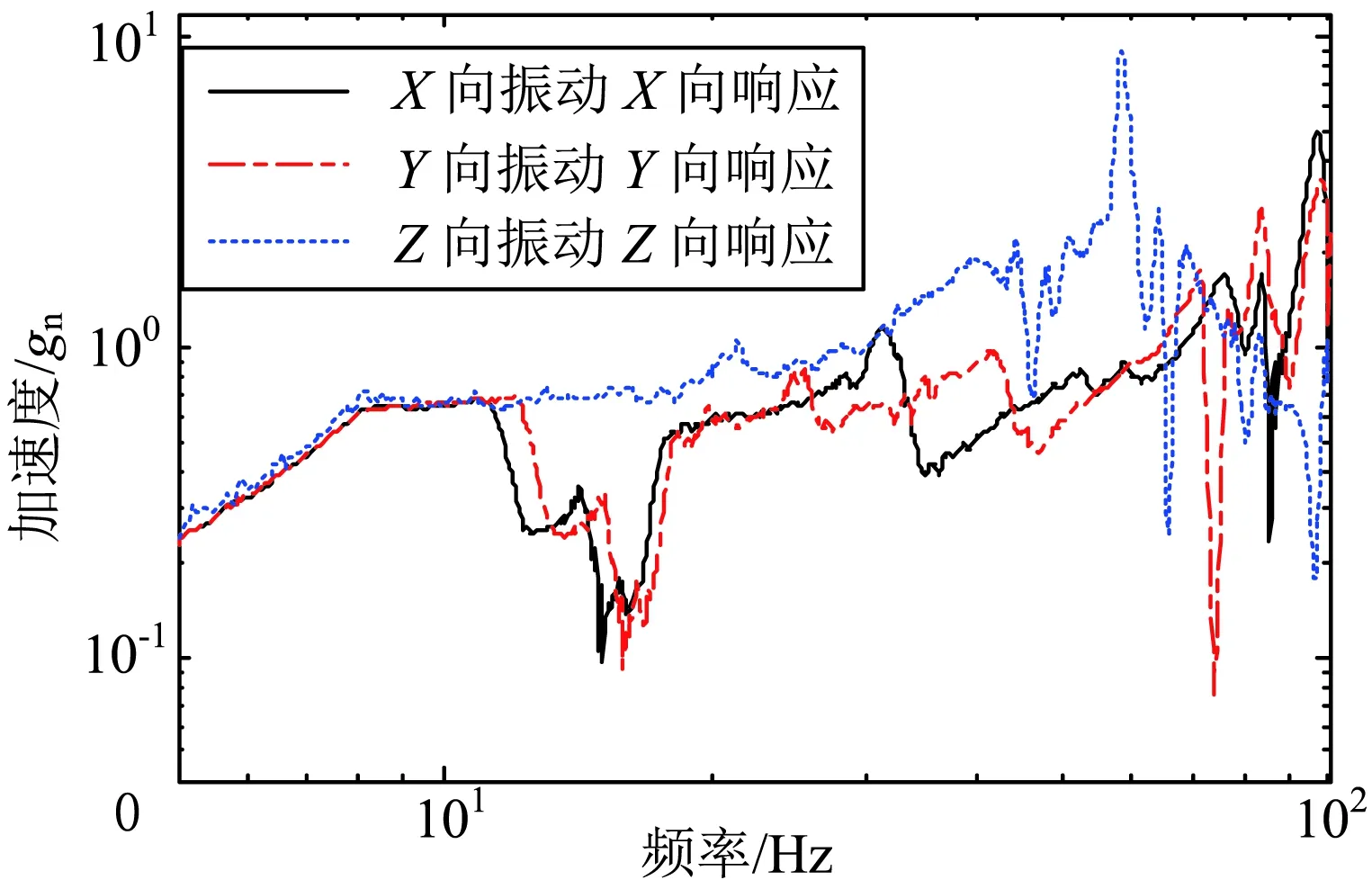
图15 贮箱安装面X、Y、Z向加速度响应曲线
5 总装设计验证
该舱体设备布局和总装方案顺利通过某卫星总装和测试工作验证,满足设备安装,管路焊装、热控实施以及检漏测试等各方面的要求。并且,由于采用了模块化设计概念,推进舱可单独交付焊装测试,与设备舱并行总装测试,将卫星主线研制周期缩短60 d,流程对比如图16所示。
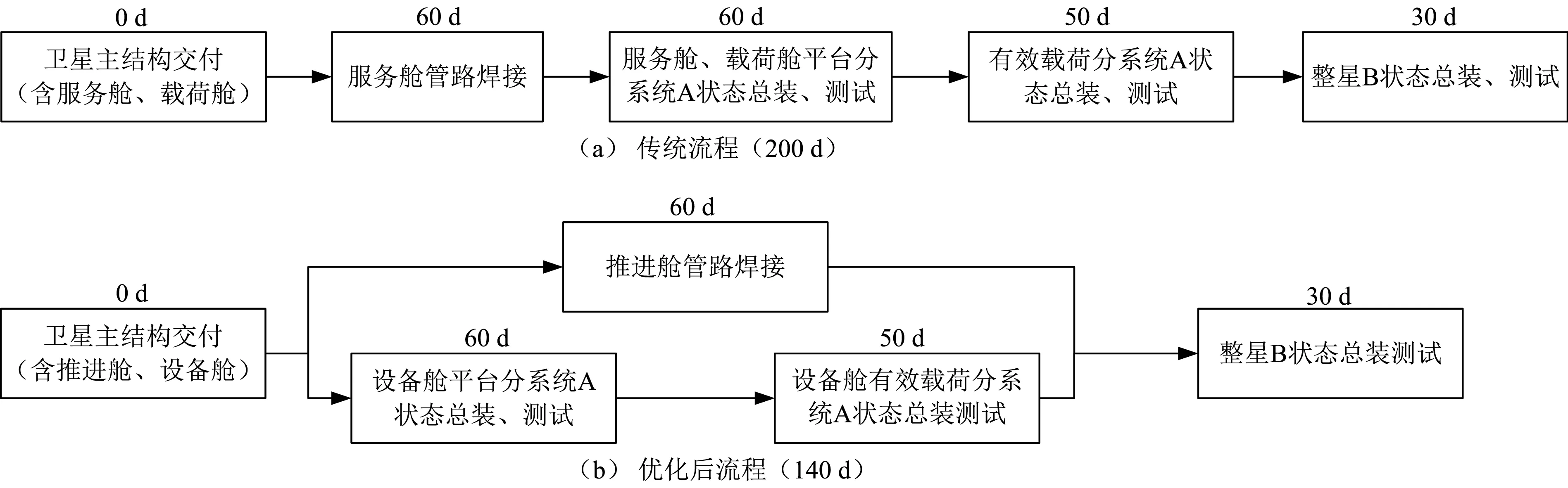
图16 推进舱模块化设计前后流程对比Fig.16 Process comparison before and after modularity design of propulsion module
6 结束语
本文描述了一个新的多任务轨道光学遥感卫星推进舱设计,该推进舱采用外部大直径承力筒内加并联贮箱安装结构的结构形式,满足500~1200 kg范围燃料承载要求,进一步扩充了我国遥感卫星平台系列的产品型谱。地面试验显示该推进舱设计使整星承载能力达到4200 kg,横向一阶频率14.8 Hz以上,说明该推进舱具有承载能力强、刚度高的优点;同时该推进舱可单独交付焊装测试,通过优化卫星AIT技术和计划流程,可将卫星研制周期缩短60 d,是卫星模块化设计理念的典型实践。
参考文献(References)
[1] 孙德伟, 焦建超, 王铮,等.国外高性能遥感卫星平台一体化技术的发展研究[R].北京:中国空间技术研究院,2015:36-37
Sun Dewei, Jiao Jianchao, Wang Zheng, et al. The development research on the integration technology of high-performance remote sensing platform abroad[R].Beijing: China Academy of Space Technology, 2015:36-37
[2] 穆远东, 郝刚刚, 张妍,等. 光学遥感卫星一体化构形设计及发展趋势[C]//光学遥感载荷与信息处理技术2013年学术会议. 北京:中国宇航学会空间遥感专业委员会, 2013: 107-132
Mu Yuandong, Hao Ganggang, Zhang Yan, et al. The development trend and the configuration integrative design of optical remote sensing satellite[C]//Optical Remote Sensing Load & Information Processing Technology 2013 National Conference Proceedings. Beijing:Space Remote Sensing Committee of the Chinese Society of Astronautics, 2013:107-132 (in Chinese)
[3] 范宁,祖家国,杨文涛,等.WorldView系列卫星设计状态分析与启示[J].航天器环境工程,2014,31(3):337-342
Fan Ning, Zu Jiaguo, Yang Wentao, et al. The design of WorldView satellite and its demonstrative value[J].Spacecraft Environment Engineering, 2014,31(3): 337-342 (in Chinese)
[4] 翟峰. 小卫星通用推进舱: 中国, CN201110152846.3 [P]. 2011-06-08
Zhai Feng. The universal propulsion module of small satellites: China, CN201110152846.3[P]. 2011-06-08 (in Chinese)
[5] 杜冬. 具备独立高轨卫星平台功能的推进舱结构: 中国, CN201410472541.4[P]. 2014-09-16
Du Dong. The propulsion module structure with independent high-orbit satellite platform function, China, CN201410472541.4[P]. 2014-09-16 (in Chinese)
[6] Pleiades. Pleiades overview[EB/OL]. (2013-06-11). [2016-10-12]. http:// www.gissky.net/
[7] WordView. WordView overview[EB/OL]. (2012-06-11). [2015-10-12]. http://wapbaike.baidu.com/item/WordView/
[8] Wiley Larson, James Wertz. Space mission analysis and design[M]. 7th ed. El Segundo, California: Microcosm Press, 2005: 141-291
[9] 杨嘉墀. 航天器轨道动力学与控制[M]. 北京, 中国宇航出版社,2005: 200-201
Yang Jiachi. Spacecraft orbit dynamics and control[M]. Beijing: China Astronautics Press, 2005:200-201 (in Chinese)
[10] 袁家军. 卫星结构设计与分析[M]. 北京: 中国宇航出版社,2004: 194-195
Yuan Jiajun. Design and analysis of satellite structure[M]. Beijing: China Astronautics Press, 2004: 194-195 (in Chinese)
[11] 徐庆鹤, 范立佳, 高洪涛, 等. 遥感卫星平台与载荷一体化构型[J]. 航天返回与遥感, 2014, 35(8):9-16
Xu Qinghe, Fan Lijia, Gao Hongtao, et al. Integrated configuration design of platform and payload for remote sensing satellite[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(8): 9-16 (in Chinese)
[12] 谢晓光,杨林. 对地观测敏捷小卫星星载一体化结构设计[J]. 红外与激光工程,2014,43(12):53-58
Xie Xiaoguang, Yang Lin. Spaceborne integration design of smart small earth observation satellite structure[J]. Infrared and Laser Engineering, 2014,43(12):53-58 (in Chinese)
猜你喜欢
军民两用技术与产品(2022年10期)2022-11-30 07:13:16
导弹与航天运载技术(2022年2期)2022-05-09 08:54:48
空间科学学报(2020年6期)2020-07-21 05:36:54
北京航空航天大学学报(2019年9期)2019-10-26 02:30:10
西安交通大学学报(2019年7期)2019-07-11 07:01:02
太空探索(2016年3期)2016-07-12 09:58:35
太空探索(2016年1期)2016-07-12 09:56:05
深空探测学报(2015年3期)2015-12-07 11:14:55
太空探索(2015年6期)2015-07-12 12:48:42
航天器工程(2014年2期)2014-03-11 16:35:24
