
差分GNSS系统在贵州山区应用于无人机航摄的探索
2018-07-04 02:44向必银
智能城市 2018年11期
向必银
贵州省地矿局测绘院,贵州贵阳 550018
1 差分GNSS原理
目前机载差分GNSS工作原理为,地面上设置固定GNSS接收机接收卫星信号,飞机上也搭载GNSS信号接收机,一般机载GNSS记录频率较高(目前多数是5~20Hz),机载GNSS记录固定时刻卫星信号,同时精确记录相机曝光时刻时间,飞行结束后将机载GNSS信号与地面站GNSS做差分解算,解算出机载GNSS固定频率时刻的坐标,然后以时间为变量建立线性模型(x,y,z)=f(t),将相机曝光时刻时间(t)作为变量输入该模型,解算出相机曝光时刻坐标(xt,yt,zt),将该数值作为相片的三个线元素用于辅助空三。由此可见,相机曝光时刻坐标是通过时间为线索内插计算得到的,不是直接观测值,误差渠道较多,不利于控制,又没有多余的观测值来检核,系统稳健性较差,当出现“丢星”现象时,则直接无法解算。但可以通过在飞机起飞前后,在地面上用机载GNSS标记点位,然后用RTK等仪器测出该标记点位坐标,用以检测空中飞行时机载GNSS数据的质量.机载差分工作流程图。

图1 机载差分工作流程图
2 P8机载差分设备简介
在满足测图精度前提下减少像控点数量,本文选择武汉苍穹电子生产的轻巧型、高性能、高精度的GNSS接收机—苍穹机载航空GNSS(P8)。它采用高精度GNSS OEM主板,具有高达20Hz的采样频率,可以跟踪观测BDS、GPS、GLONASS卫星信号。同时可根据无人机机型及载重情况,分别搭配高性能航空陶瓷天线、高性能航空螺旋天线(仅重140g/18g),满足各种机型航测需求。通过配套处理软件KGO进行解算,使之更好地实现了厘米级动态差分定位和动态精密单点定位。无人机航测通过搭载苍穹数码P8设备提供的高精度差分定位结果可以辅助空三加密快速生产4D产品,采用三维建模手段可以迅速生产出高清影像、三维地表模型等资料,使得工作决策科学、精准。同时P8/KGO与空三软件配套工作,是针对GNSS辅助空中三角测量,可以减少地面像控点数量,提高作业效率,降低生产成本。P8目前可支持多种空三软件,同时适用于多个品牌的无人机。
3 差分GNSS系统在贵州山区航测应用
2016年上半年,P8机载设备在贵州某测区进行测试,测区21km2,设计飞行分辨率0.1m,影像899张,获取的原始影像数据信息丰富,照片色彩基本一致。颜色饱和度逼真,反差适中,纹理清晰。差分数据经过KGO差分解算,固定解率达到98.07%,数据质量极佳。
按照全野外控制点无差分、少量控制点+辅助GNSS差分辅助空三平差结果进行对比分析,测试结果见表1。
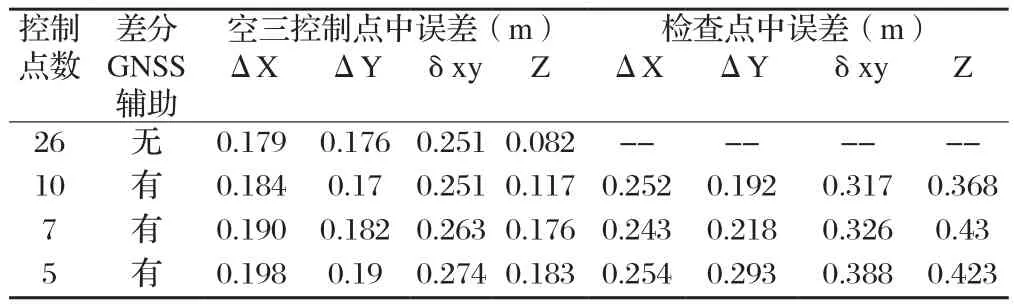
表1 测试结果对比
从上表不难看出,全野外26个像控点布控平面精度0.251m、高程点位中误差0.082m,符合测图标准。当野外控制点数减少到5个,有差分GNSS辅助时,其余21点作为检查点,满足基本的像控点布设要求,平面点位中误差0.388m,高程中误差为0.423m,满足规范要求。
通过参考《低空数字航空摄影测量内业规范》,本次测试获得的技术结论如下:
(1)差分全野外26个控制点平差结果中,加密点位中误差在0.2米左右,高程误差在0.2m左右,符合国家规范要求。
(2)利用GNSS辅助空三平差,即P8设备,选取其中5个点作为控制点,其余21个点作为检查点,其检核点按照地物点误差精度进行统计,平面以及高程中误差均在0.4m左右,满足国家规范要求(注:高程误差较大点基本是房角点),并且减少了80.07%的像控点。
针对GNSS辅助空中三角测量,P8/KGO与空三软件配套形成了一套无人机高精度定位解决方案,它可以减少地面像控点数量80%以上,大幅提高作业效率,降低生产成本。由此得出,差分数据在保证输出成果精度达标前提下能减少空三对像控点数量上的依赖。
4 差分GNSS系统+构架航线优化航线设计
如果在航线两端布设构架航线,精度会进一步提高。为了验证构架航线对无人机差分GNSS辅助空三能在1∶1000大比例尺地形测绘中对提高精度有帮助,本文选择如下测区测试。
测试区位于贵州某县,测区面积约27km2,影像1421张,航向重叠80%,旁向重叠51%,地面分辨率0.1m,航摄时间于2016年下半年,搭载佳能5D Mark Ⅲ相机和苍穹P8设备,地面基站为P8配套设备,共20条航带其中构架航线2条,航带东西向长约5.5km,测区南北宽5km,无人机航迹见图2。

图2 无人飞行器航迹图
数据处理方面,GNSS定位解算采用苍穹公司高精度GNSS差分后处理软件KGO;空三软件使用inpho7.0数字摄影测量系统,支持无人机影像相机自检校及高精度GPS辅助空三解算;精度检查采用航天远景MapMatrix4.1软件。
4.1 像控布点及空三加密
采用inpho7.0软件,结合P8差分设备和构架航线构成强度较高的像点网,本次测试中,仅在测区四角布设了4个平高地面控制点。
4.2 精度验证
MapMatrix软件 在导入inpho7.0软件加密成果后,自动构建立体模型,在立体环境下人工读取检查点三维坐标,并与对应的7个野外实测检查点对比。检查点误差见表2。

表2 检查点误差单位(m)
从上表可知,检查点的平面位置中误差为0.163m、高程中误差为0.097m。7个检查点的平面位置误差均小于0.25m,高程误差均小于0.15m。平差结果明显好于我国现行数字航空摄影测量规范对1∶1000地形测图航测内业加密检查点的平面位置中误差≤0.50m、高程中误差≤0.28m的要求。
(1)在27km2测区,使用差分GNSS设备空三采用“构架航线+测区四角平高控制点”的控制方案,区域四角4个平高控制点进行加密,加密结果利用检查点检查后完全满足平地1∶1000地形测图航测加密的精度要求。
(2)如果采用常规密周边布点光束法区域网平差加密方法,测试区要达到1∶1000地形测图规范要求,区域网周边需要每隔4条基线布设1个平高地面控制点、区域网内部需要每隔4条基线布设1个高程地面控制点,约需设置80个平面控制点和390个高程控制点,而采用差分GNSS+构架航线辅助空三技术后,仅需要区域四角4个平高地面控制点,与密周边布点的光束法区域网平差相比,GNSS辅助光束法区域网平差的平面控制点减少了95.0%、高程控制点减少了99.0%。
(3)差分GNSS辅助无人机空三能够在满足1∶1000地形测图精度的条件下,减少工作量,缩短了工作周期,降低了生产成本,其推广应用价值是十分巨大的。
5 结语
GNSS辅助空三可以大量减少地面控制点,而且带地面控制的GNSS辅助光束法区域网平差精度能够满足1∶1000地形图生产。无论平地区域还是丘陵地、 山地区域,采用GNSS辅助光束法区域网平差,精度达能到自检校光束法区域网平差的精度。
GNSS辅助空三已经成为一种极为实用、经济的摄影测量加密方法,其在测绘生产中的应用已经逐渐改变了航空摄影测量一贯遵循的“航空摄影—外业控制联测—内业测图”的长周期作业模式。它在缩短航测成图周期、节省外业控制工作量、减轻劳动强度等方面已经创造出了巨大的经济和社会效益。
[1] 张丽丽.事后差分技术在大地鹰无人机航测空三中的应用分析[J].测绘技术装备,2017,19(2):11-4.
[2] 陈兴杰.IMU/DGPS无人机系统集成及数据处理精度研究[J].矿山测量,2017,45(2):48-51.
[5] CH/Z 3003—2010,低空数字航空摄影测量内业规范[S].
[6] CH/T 3006—2011,数字航空摄影测量控制测量规范[S].
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
河北地质(2021年4期)2021-03-08
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
中国铁道科学(2019年5期)2019-10-19
测绘通报(2018年10期)2018-11-02
企业科技与发展(2018年5期)2018-09-10
计算机应用(2017年1期)2017-04-17
