
往复式切割装置摆环机构的刚柔耦合仿真及分析
2018-07-04 07:52史增录唐学鹏鄢金山张学军周伟权
干旱地区农业研究 2018年3期
史增录,唐学鹏,鄢金山,张学军,周伟权
(1.新疆农业大学机电工程学院,新疆 乌鲁木齐 830052;2.新疆农业工程创新设计重点实验室,新疆 乌鲁木齐 830052)
联合收获机械的广泛运用是促进农业经济发展的重要手段。切割装置是收获机械的关键部件之一,有往复式和圆盘式两种。往复式切割装置的传动机构有曲柄连杆机构、曲柄滑块机构、摆环机构、行星齿轮机构等多种传功机构[1]。由于农牧业机械的作业环境恶劣,工况复杂,对机械的强度、刚度及其它性能有特别的要求[2],因摆环机构结构紧凑、力学性能好、占空间小,连杆长度短等优点而被广泛运用于收获机械。
目前,对摆环机构运动学和动力学的理论计算,以及摆环机构的仿真分析已有相关的研究,但对其进行刚柔耦合仿真分析的研究较少。所以,运用计算机仿真技术进行摆环机构的运动学、动力学的刚柔耦合研究,为更真实、准确地研究摆环机构提供方法和依据[3]。
1 摆环机构的工作原理及结构
1.1 主要结构
摆环机构的模型如图1所示,工作过程中将动力传输到主轴,带动主轴转动,通过摆环使得摆叉带动摆轴做往复转动,摆轴的往复转动驱动摆杆左右摆动,通过导杆带动割刀做往复运动[4]。摆环机构的详细结构,如图2所示。
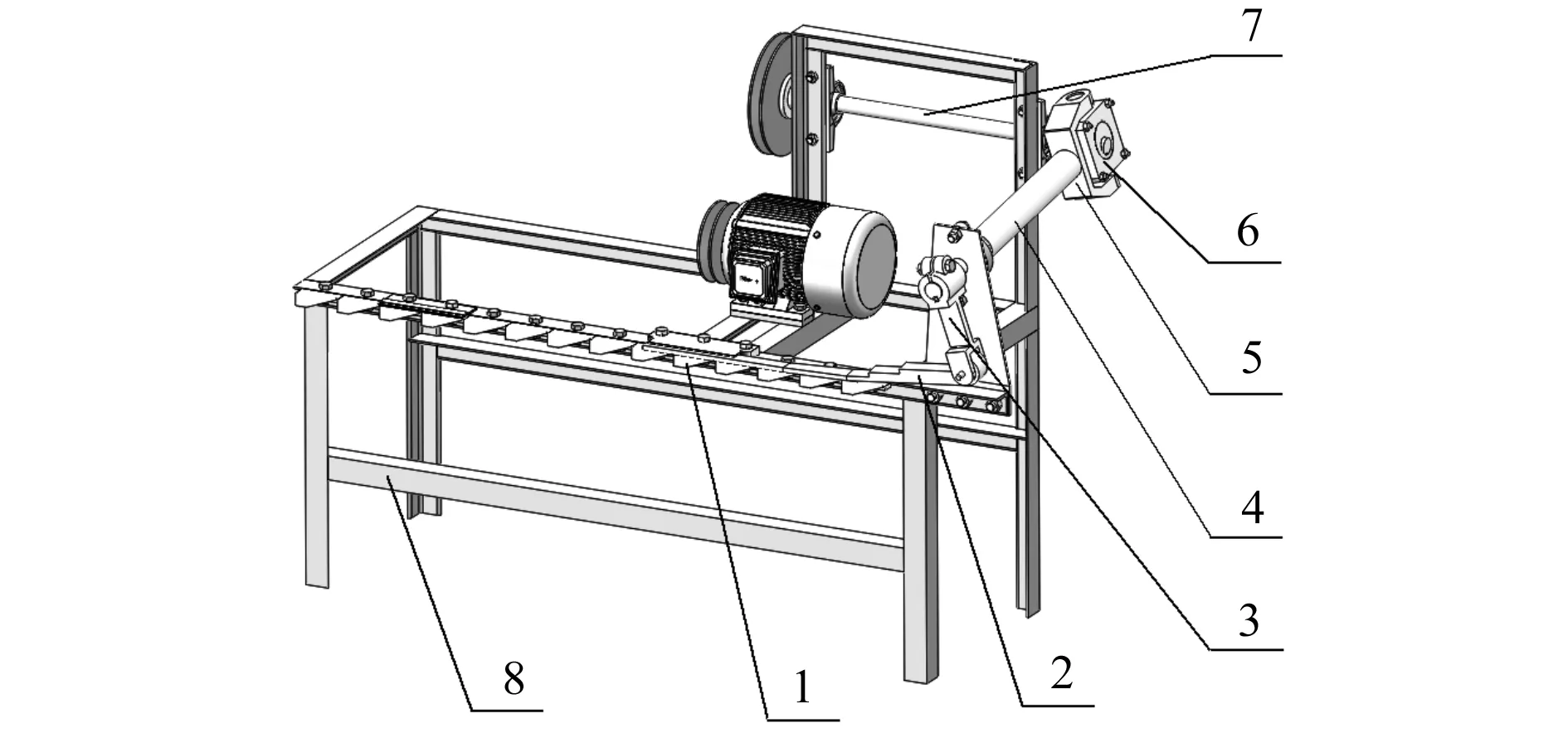
1.割刀;2.导杆;3.摆杆;4.摆轴;5.摆叉;6.摆环;7.主轴;8.机架1.Cutter;2.Guide-bar;3.Swing link;4.Pendulum shaft; 5.Side vent;6.Sway ring;7.Spindle;8.Frame图1 往复式切割装置的结构图Fig.1 Structrue diagram of reciprocating cutting device
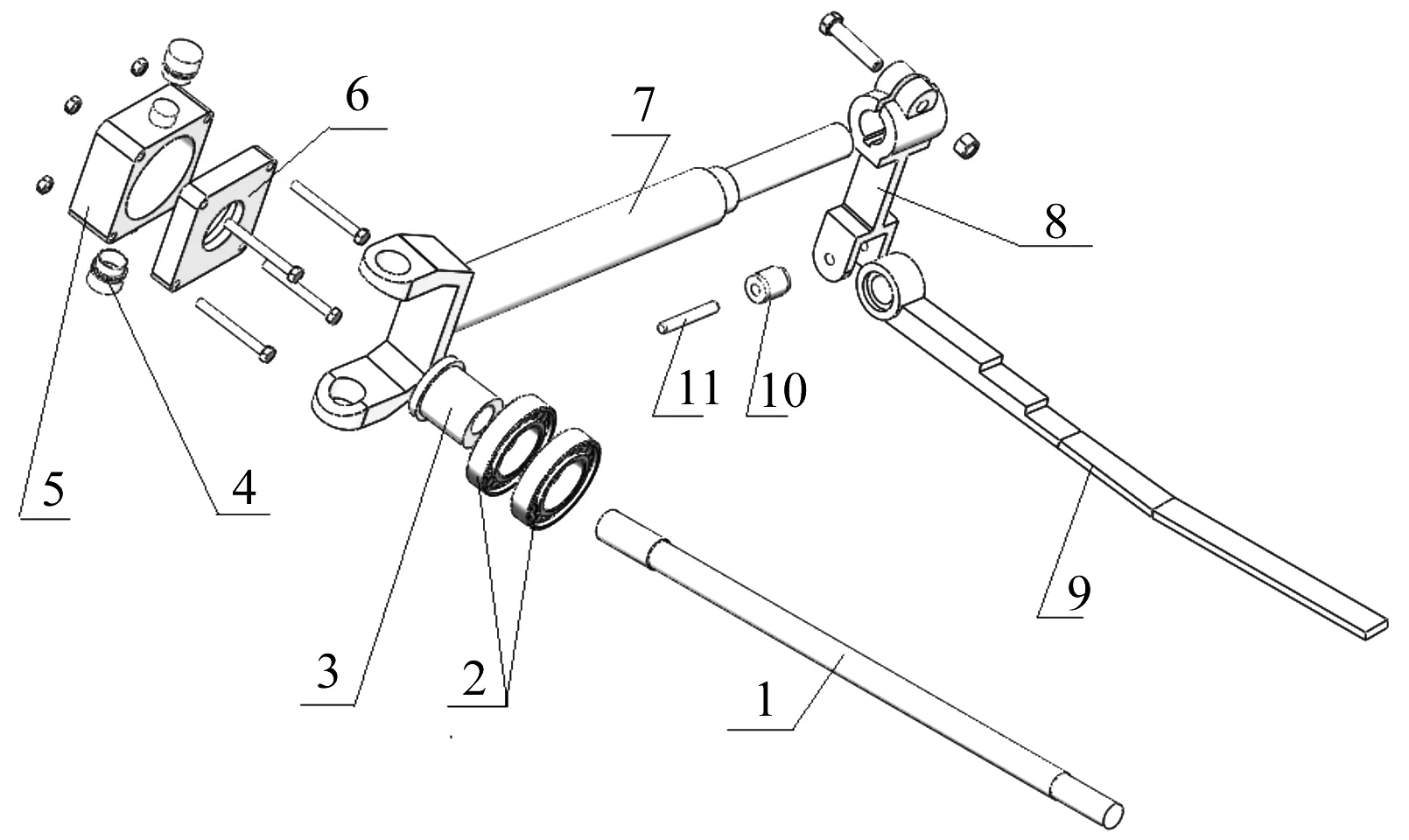
1.主轴;2.轴承;3.轴套;4.滑环;5.摆环;6.轴承端盖; 7.摆轴;8.摆杆;9.导杆1.spindle;2.bearing;3.shaft sleeve;4.slip ring;5.sway ring; 6.bearing clver;7.pendulum shaft;8.swing link;9.guide-bar图2 摆环机构详细结构图Fig.2 Detailed structure diagram of sway ring mechanism
1.2主要技术参数
往复式切割装置的主要技术参数如表1所示。
1.3 工作原理
摆环机构的结构简图如图3所示[5]。该机构是空间六杆机构,以摆轴、主轴和摆环中心轴线的交点O为原点建立坐标系,主轴的OX轴和摆轴的OD垂直,摆环的轴线OA和主轴OX的夹角α为摆角。摆叉和摆轴固定连接,摆杆在D点固定安装在摆轴上,导杆在E点和摆杆铰接,导杆另一端和割刀铆接在一起。
当主轴绕OX轴以ωt转动时,驱动摆环轴线OA绕OX轴旋转,使得摆环既绕自身轴线转动,又绕着摆轴的轴线摆动,带动摆杆绕着D点在平行于XOY的平面内摆动,通过导杆驱动割刀往复运动。
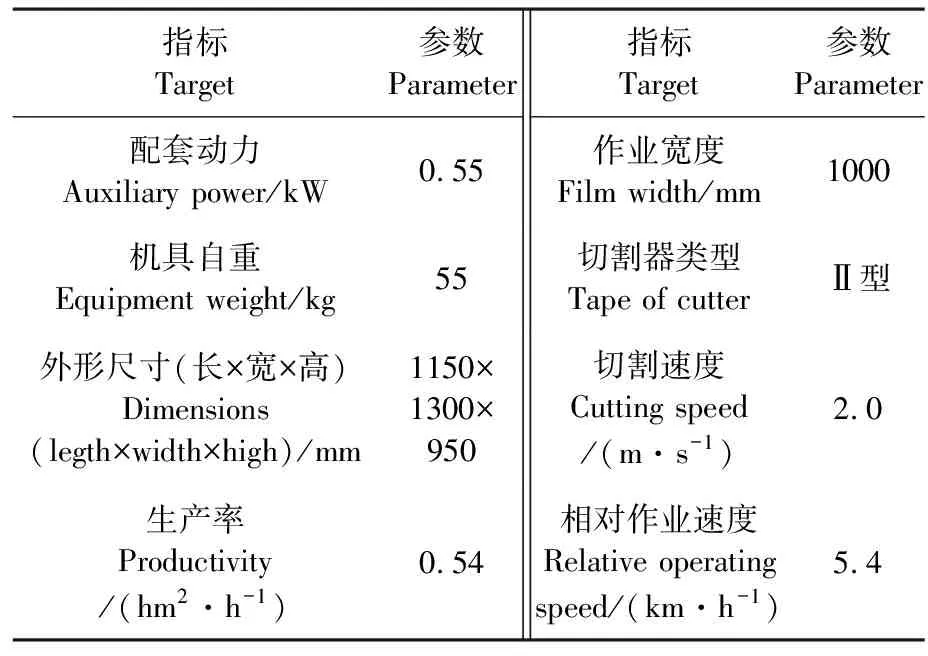
表1 往复式切割装置的主要技术参数
2 摆环运动特性分析
摆环机构是切割器割刀实现往复运动的动力传动机构,其结构参数直接影响割刀的运动特性。但摆环机构的运动轨迹复杂,为方便分析,依据图1建立了互相垂直的Ⅰ面和Ⅱ面,Ⅰ面平行于由OX、CB两直线组成的平面。如图4所示是摆环机构的运动分析图,据此得到摆叉分别在Ⅰ面、Ⅱ面上的投影,以解决转角与摆角之间的关系。
据摆环运动特性分析[6],设摆环的初始位置为AA,当主轴转过φ=ωt时,
OA=ρ=OA′cosε=Rcosε
(1)
ρ值通过椭圆的方程得
(2)
(3)
将式(3)带入(2)得
(4)
据公式(1)和公式(4)得
(5)
经三角函数转化后得
(6)
式中,α为摆环的结构参数,是OA与OX的夹角(°);t为主轴转动时间(s);ρ为在摆环在Ⅱ面上的投影的椭圆任一点的极半径(mm);ω为主轴的转动角速度(r·s-1);φ为ωt(r·min-1);ε为摆环的摆角(°)。
获得摆轴的摆角和主轴转角的关系后,据图3以经过D点且平行于XOY平面建立坐标,如图5所示。
如以摆幅的对称轴线为割刀运动的起始位置,则得割刀的位移为:
x=Lsinε
(7)
(8)
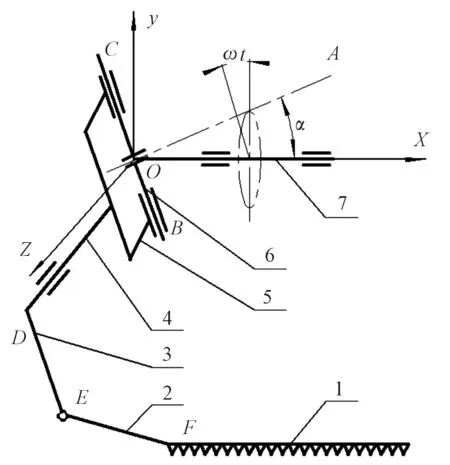
1.割刀;2.导杆;3.摆杆;4.摆轴;5.摆叉;6.摆环;7.主轴1.cutter;2.guide-bar;3.swing link;4.pendulum shaft; 5.side vent;6. sway ring;7. spindle图3 往复式切割装置运动简图Fig.3 Kinematic sketch of reciprocating cutting device
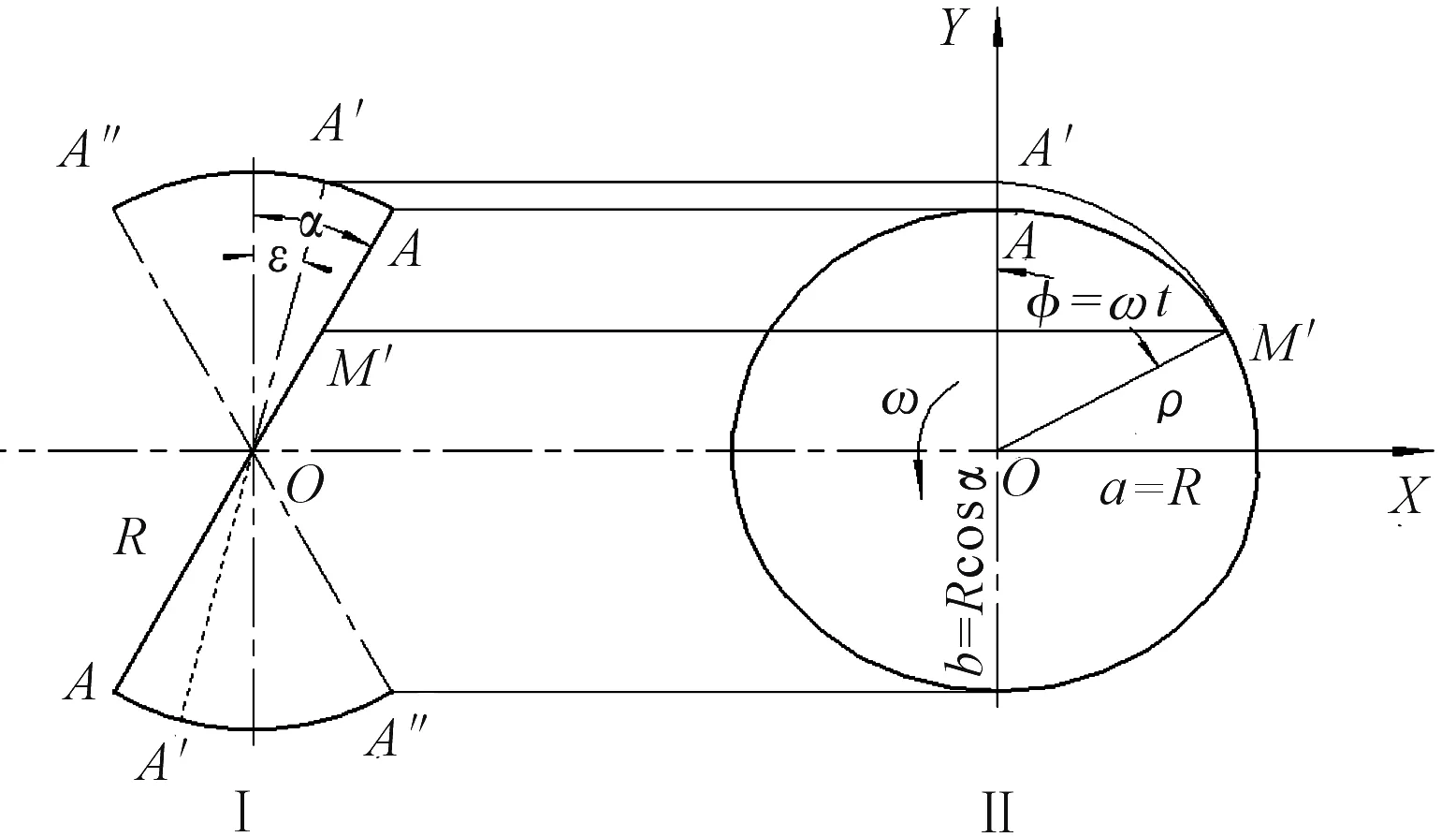
图4 摆环运动示意图Fig.4 Motion diagram of sway ring
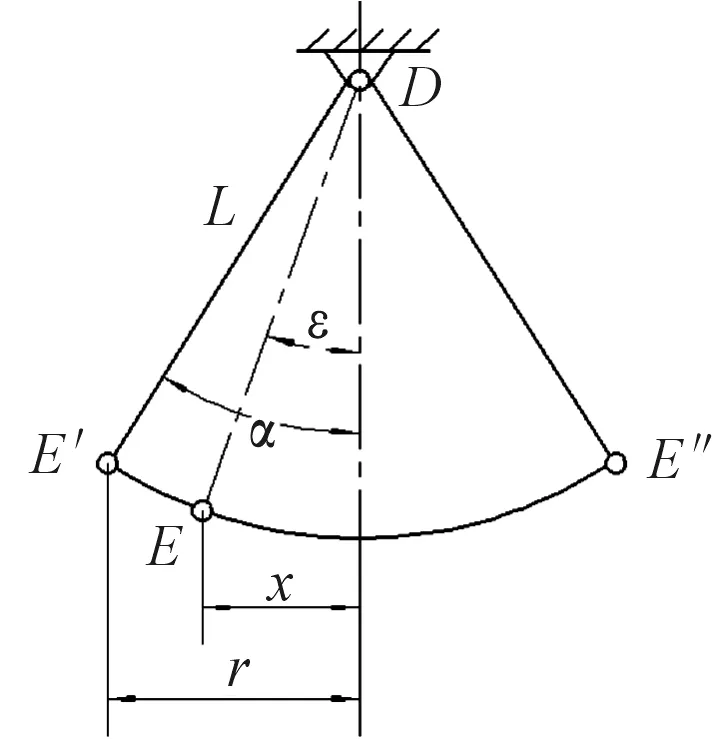
图5 摆杆运动简图Fig.5 Kinematic sketch of swing link
将公式(7)、(8)带入公式(6),得
(9)
式中,x为割刀的运动位移(mm);L为摆杆的长度(mm)。
通过对割刀的位移x进行求导,获得割刀的速度,再对速度求导可获得割刀的加速度。
3 摆环机构的刚柔耦合模型建立
3.1 模型建立
用Solidworks软件来建立摆环机构的三维参数化模型,完成摆环机构的装配。将Solidworks建立的摆环机构的三维实体模型另存为Parasolid(.X_T)格式,转化为ADAMS可读取的文件,将Parasolid(.X_T)格式文件导入到ADAMS软件中,生成ASAMS环境下的模型[7-9]。
3.2 添加约束、驱动
利用ADAMS中的工具箱操作,在大地、机架、主轴、摆环、摆叉、摆轴 、摆杆、导杆和割刀之间添加适当的约束。摆环机构的虚拟模型不包括大地共有7个移动部件(moving part),添加4个旋转副(revolute joint),3个固定副(fixed joint),1个平移副(translational joint),1个线约束(inline primitive_joint),1个旋转驱动(revolute joint motion),摆环机构的虚拟模型添加约束见图6。
为准确地仿真模拟摆环机构在工作中的实际运动情况,对其各部件均按实际情况添加部件的材料属性。

图6 往复式切割装置添加约束图Fig.6 Added constraints diagram of reciprocating cutting device
3.3 关键部件柔性化和求解计算
完成摆环机构各部件的约束后,在主轴上施加500r·min-1的驱动转速,在进行ADAMS的求解计算,设置仿真的时间为0.25s、步长为500步。
此时求解计算提示仿真失败(simulation operation failed),原因在于摆环机构实际工作中,摆杆是绕着摆轴和摆杆的铰接点摆动,摆杆下端不是直线运动,通过导杆的弹性变形来补偿摆杆摆动过程中垂直方向的位移差,来实现割刀的往复运动。因此在仿真分析时,必需将导杆进行柔性化,才能进行虚拟仿真分析。
在ADAMS2013中可将刚性部件直接进行柔性化操作。先选中导杆部件,直接单击右键,选择柔性化(make flexible),新建柔性体,导杆材料选用65Mn,其弹性模量为2.11×1011N·m-2,密度为7.82×103kg·m-3,泊松比为0.288[10]。网格划分时选用的单元类型为solid,经过划分后导杆共有237个节点,603个单元,如图7所示为导杆柔性化后的网格划分模型。完成导杆的柔性化,可进行摆环机构的刚柔耦合仿真分析。
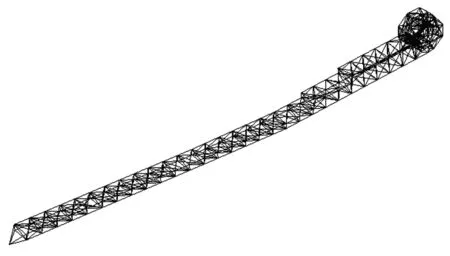
图7 导杆网格划分的模型Fig.7 The model of devided guide-bar grid
4 仿真分析
由摆环机构的运动特性及理论分析,设计条件为输入转速500r·min-1,摆环斜套中心线与主轴中心线的夹角(称为摆角)为15°,仿真结束后,从后处理器模块绘制和输出一系列仿真结果[11]。图8是割刀在水平方向运动的位移变化曲线,图9是割刀在水平方向运动的速度、加速度变化曲线。图10是摆轴的角速度和角加速度变化曲线。
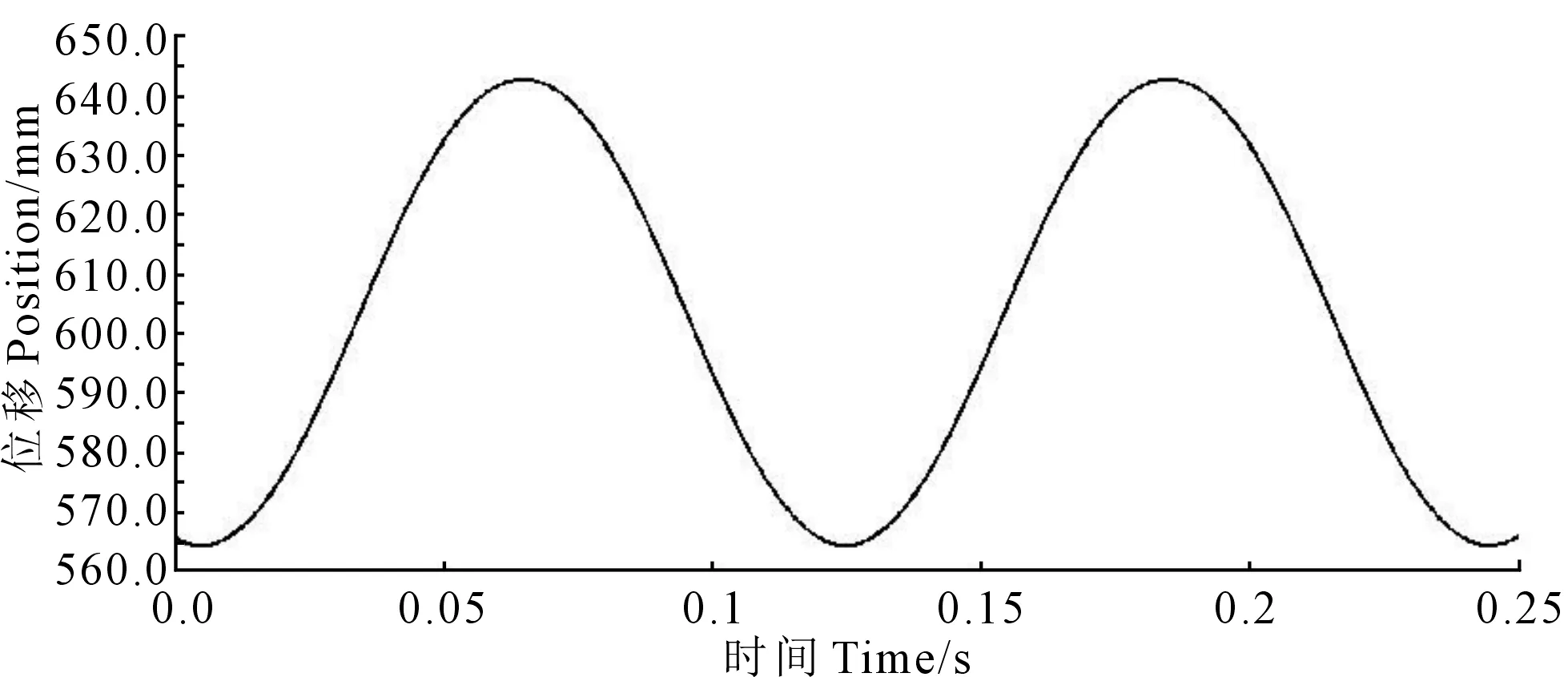
图8 割刀质心的位移曲线Fig.8 Curve of the shift displacement of the cutter senter of mass
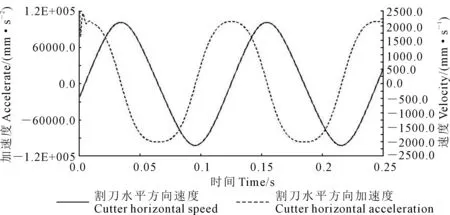
图9 割刀水平方向的速度、加速度曲线Fig.9 Curve the velectiy and acceleration at the center of mass of the cutter
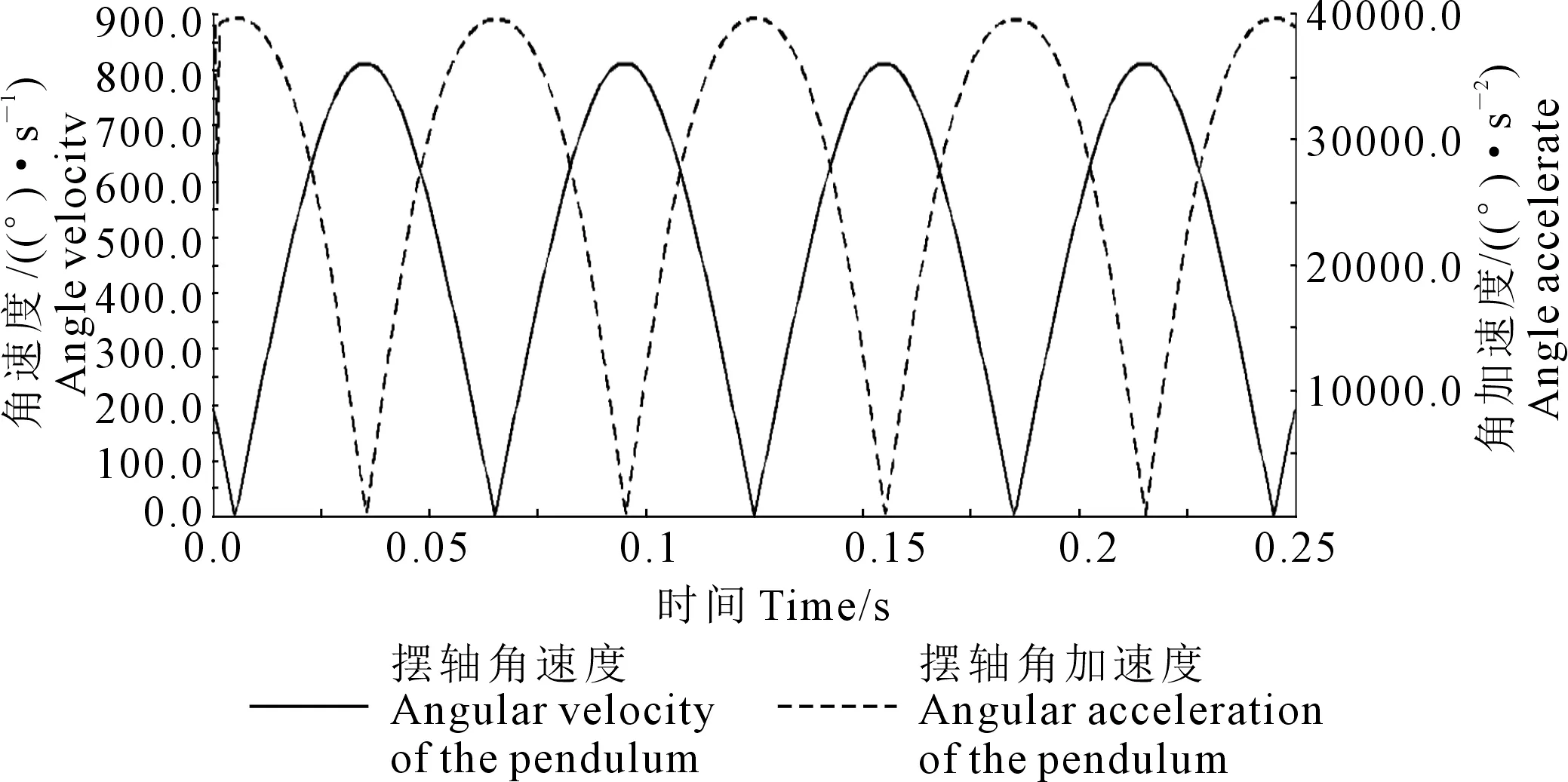
图10 摆轴角速度、角加速度变化曲线Fig.10 Curve of the angular veloctiy and angular acceleration at the center of mass of the pendulum shaft
为模拟切割装置真实的工作负载情况,在割刀上添加往复惯性力和农作物秸秆对割刀作用力。根据切割每平方米面积的小麦秸秆所需功率为100~200N·m·m-2[12],取其功率为200N·m·m-2,以设计的切割装置1m工作幅宽,行走速度1.5m·s-1计算,则秸秆对整个割刀的作用力为300N。根据F=-ma计算,通过仿真计算割刀最大的加速度为116.74m·s-2,则割刀和导杆在运动时的惯性力最大为400N。
Rapid identification of cosmetic raw materialsby Fourier transform infrared spectroscopy 3 26
应用IF函数将惯性力和切割阻力添加到割刀上,其函数定义为IF(time-0.005:700,700,IF(time-0.065:-700,-700,IF(time-0.125:700,700,IF(time-0.185:-700,-700,IF(time-0.245:700,700,IF(time-0.025:700,700,0)))))),进行动力学的仿真分析。图11所示是导杆水平方向两端的受力变化。图12 、图13分别是摆杆对摆轴的力和力矩的变化图。
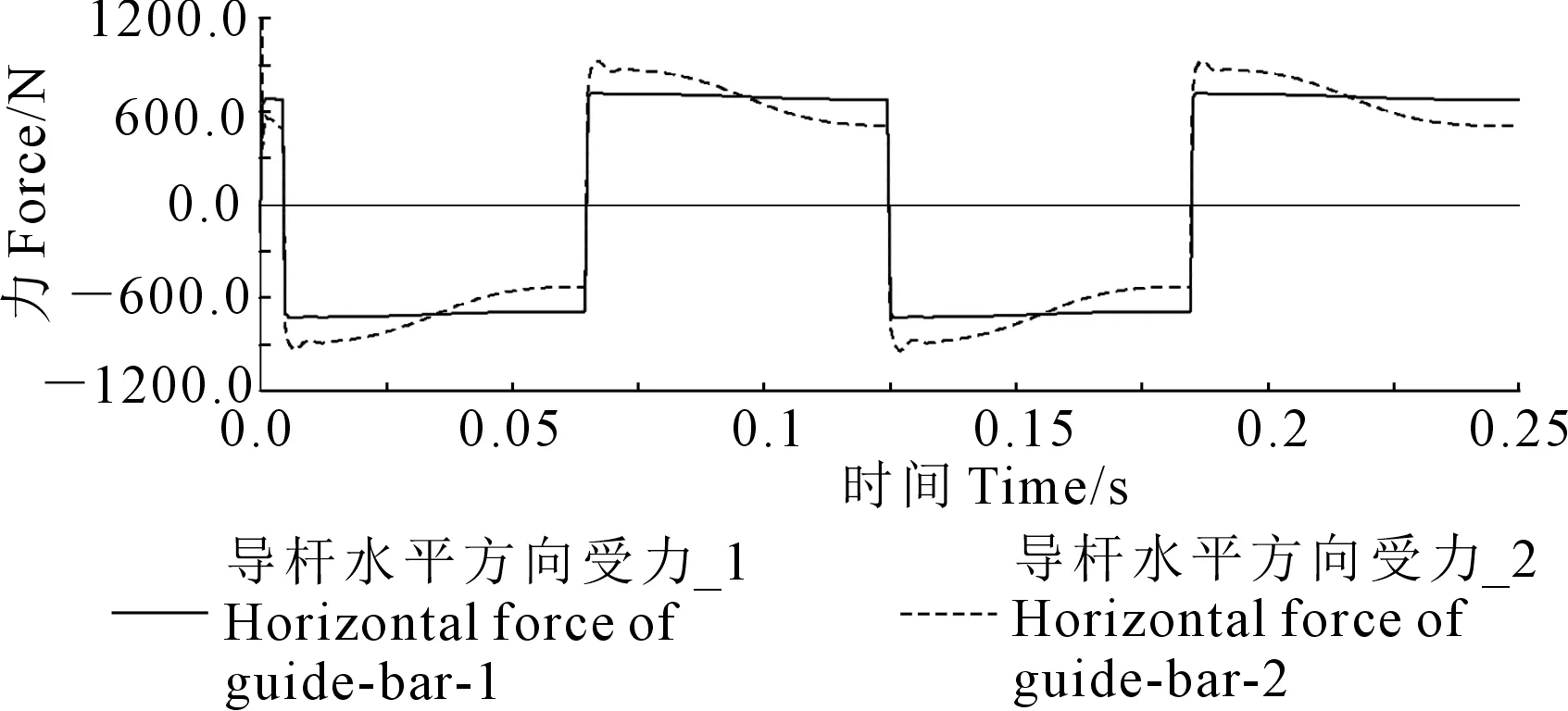
图11 导杆水平方向两端受力变化曲线Fig.11 Curve of the force at two end of the horizontal guide-bar
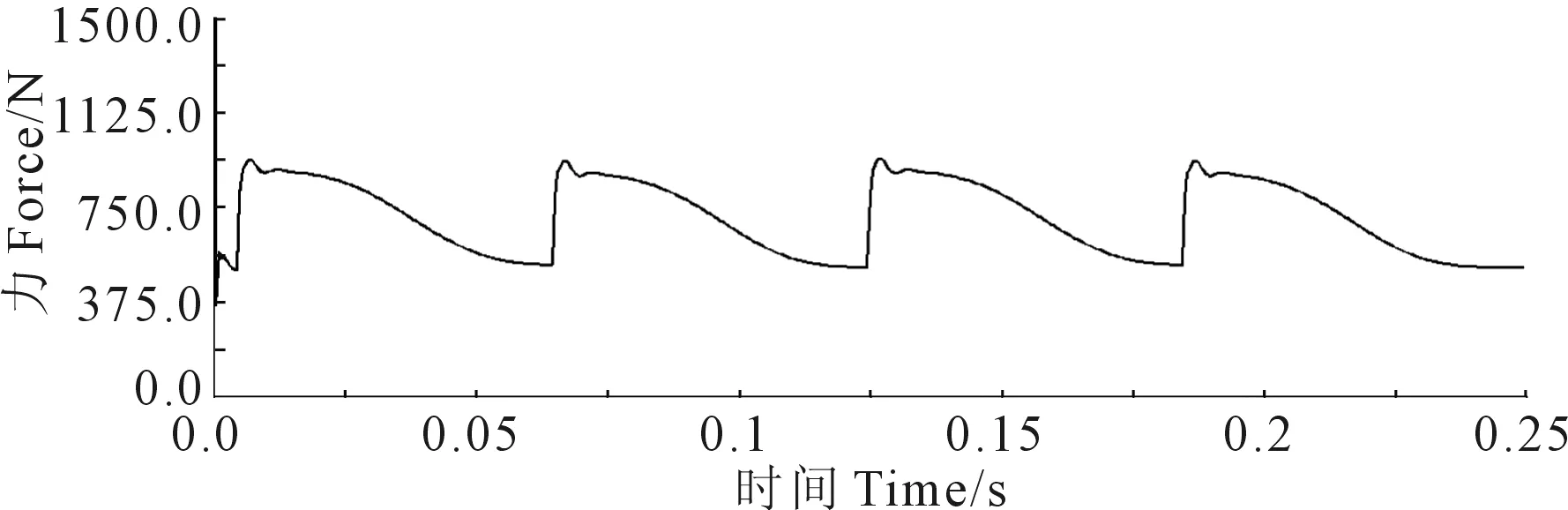
图12 摆轴的受力变化Fig.12 Force change of the pendulum shaft

图13 摆轴的力矩变化Fig.13 Torque change of the pendulum shaft
5 仿真结果分析
通过摆环机构刚柔耦合仿真的分析,摆环的摆角为15°时,割刀最大的切割速度为2.12m·s-1,满足小型收获机切割速度的技术要求[12]。割刀的加速度在0s时,最大达4900m·s-2,但在0.001s内其加速度降至91.46m·s-2,其后割刀未出现加速度值突变的情况;摆轴在0s时角加速度达679.59r·s-2,但在0.001s内其加速度降至438.22r·s-2,在0.0015s时角速度增至684.52r·s-2,其后摆轴角加速度数值规律变化。
同时对应到导杆和割刀固定位置上的受力,在0s时受力达14868.74N,在0.0005s内其受力降至362.74N,随后导杆受力规律变化,最大受力为724.25N,摆轴对导杆的受力最大为928.02N;摆轴在0s时受力和力矩分别达15844.06N和-1.493×102N·m在0.0015s内力和力矩分别降至551.68N和-6.61N·m其后摆轴和摆杆连接处承受的力和力矩最大分别为919.26N和25.4N·m,且呈规律变化。
摆环机构工作过程中导杆在给割刀传送动力,驱动割刀往复运动的同时,自身也会存在较大变形,因此在进行摆环机构刚柔耦合仿真过程中,不仅有割刀、导杆自身重量引起的惯性力外,还有导杆柔性结构引起的启动冲击力,使得仿真初始阶段加速度、受力和力矩等参数跳跃较大。
6 结 论
摆环机构是往复式切割装置的关键部件,其性能的优劣直接影响到收获机的切割效率。通过分析研究摆环机构的结构、工作原理、运动特性,获取影响摆环机构性能的关键指标。利用ADAMS进行的摆环机构刚柔耦合仿真,并在割刀上添加作业过程中的工作负载和惯性力,分析摆环机构的运动学和动力学特性。
通过仿真分析,切割装置割刀的作业速度达2.12m·s-,忽略起始的惯性力和冲击力,割刀的最大加速度达103.66m·s-2,摆轴的最大角加速度达691.95r·s-2,满足切割器的作业要求。利用切割装置的作业负载和割刀速度反向的特性,添加割刀和导杆的惯性力和作业负载后,获得导杆两端最大受力分别为724.25N和928.02N,为导杆的强度和疲劳分析提供了准确的数据;摆轴承受的最大力和力矩分别为919.26N和25.4N·m,且受交变载荷作用。通过分析,可为摆环机构的惯性力平衡和关键部件的强度和疲劳校核提供支撑。
[1] 李宝筏.农业机械学[M].北京:农业出版社,2003.
[2] 武志云,卢宜青,白振力. 收获机械中摆环机构理论分析[J]. 内蒙古工业大学学报,1997,16(4):49-53.
[3] 程梦子,陈子龙,何朝明.基于 ADAMS 的往复式切割机的柔性动力学分析[J].机床与液压,2016,44(11):138-140.
[4] 谢珣,史景钊,李保谦,等.基于 ADAMS 的摆环机构运动仿真及优化设计[J].农机化研究,2015, (6):67-69.
[5] 曹元寿.英汉农业机械工程词典[M].北京:中国农业出版社,1995:1101.
[6] 吴守一.农业机械学(下册)[M].北京:机械工业出版社,1987:25.
[7] 赵武云,史增录,戴飞,等.ADAMS2013基础与应用实例教程[M].北京:清华大学出版社,2015:251-265.
[8] 史增录,张学军,赵武云,等.4UX-550型马铃薯挖掘机振动筛运动特性分析及仿真研究[J].甘肃农业大学学报,2013,48(03):156-160.
[9] 史增录,赵武云,吴建民,等.4UX-550型马铃薯收获机悬挂机组机液耦合仿真[J].农业机械学报,2011,42(6), 98-102.
[10] 张能武,唐亚鸣.新编实用金属材料手册[M].济南: 山东科学技术出版社,2010:543.
[11] 赵红乔.摆环机构的动力学仿真及有限元分析[D].长沙:湖南大学,2010:26-33.
[12] 北京农业工程大学.农业机械学第二册(下册)[M].北京:农业出版社,1997:24-36.
猜你喜欢
橡塑技术与装备(2022年7期)2022-07-06
机械设计与制造工程(2022年1期)2022-02-19
农机使用与维修(2021年12期)2021-11-27
海洋石油(2021年3期)2021-11-05
化工管理(2021年7期)2021-05-13
模具制造(2019年10期)2020-01-06
活力(2019年17期)2019-11-26
电子技术与软件工程(2019年18期)2019-11-18
中国新技术新产品(2017年21期)2017-09-28
汽车零部件(2016年2期)2016-09-26
