
马铃薯仿生挖掘铲减阻性能研究
2018-07-04 07:52石林榕赵武云孙步功
干旱地区农业研究 2018年3期
石林榕,赵武云,孙 伟,孙步功,张 华
(甘肃农业大学 机电工程学院,甘肃 兰州 730070)
马铃薯挖掘铲的作用为掘出薯块,并将它们输送给分离装置并进行土薯分离。挖掘铲基本设计要求:作业时既要掘出绝大部分马铃薯,又要尽量减轻分离装置负担、降低功耗、防止拥土,并能顺利地把掘起物输送至分离装置[1]。马铃薯挖掘铲挖掘性能直接影响着马铃薯挖掘机整体性能,其中减小挖掘铲阻力能有效提升挖掘机的作业效率。
本文基于工程仿生学理论从土壤动物挖掘土壤中获得启发[2],对马铃薯挖掘机挖掘铲触土部位进行仿生改形设计来提高其减阻碎土性能。郭志军等人[3-4]依田鼠爪趾弯曲轮廓形状设计了仿生弯曲型深松部件,其减阻效果十分明显。蝼蛄作为具有高超的挖掘能力的土栖昆虫,其主要触土部件爪趾在构形与形态经过自然进化处于最优化状态,能将挖掘阻力减至最小[5]。本文应用逆向工程方法,提取蝼蛄胫节上第一趾的侧面曲线轮廓信息,设计马铃薯挖掘机仿生铲。
为对仿生铲的挖掘性能进行研究分析,本文应用离散元法(Discrete Distinct Element Method)模拟仿生铲挖掘土壤过程[6]。离散元法引入中国后,在岩土工程领域发展较快,而农业工程中更适用的颗粒离散元研究相对缓慢[7]。李艳洁等[8]对土壤试样进行了单轴压缩试验与离散元法模拟对比研究,验证离散单元法模拟土壤是可行性的。于建群[9]采用离散元法分析开沟器的工作过程以从细观角度详细分析不同条件下开沟器的工作过程及工作阻力。李艳洁[10]基于弹簧线性接触模型的离散元法对圆锥贯入沙土的动态过程进行三维数值模拟,分析了土壤颗粒位移和速度场的变化规律等。而将离散单元法应用于马铃薯挖掘机挖掘铲挖掘土壤过程仿真尚鲜见报道。本文在以上研究基础上对所设计的马铃薯挖掘机仿生挖掘铲进行了基于离散单元法的土壤挖掘数值模拟是一种尝试。
1 马铃薯仿生挖掘铲的设计
1.1 蝼蛄爪趾第一趾仿生信息的获取
蝼蛄,土栖,触角短于体长,前足开掘式。本文研究的东方蝼蛄(Gryllotalpaorientalisburmeistr),遍及全国,一般在长江以南较多,其主要生活于地下15~20cm地层。东方蝼蛄前足爪趾正向上形状似铲,其构形适于土中挖掘,侧向上形成具有一定弧度的曲面,如图1a。蝼蛄爪趾尖端为四方楔形,正、侧两面的楔角均为30°左右,如图2。楔形不仅能分散对土壤压力和最大程度地减少触土面积,还可减小爪趾挖削时与土壤间的摩擦力和土壤粘附力。研究显示,蝼蛄的爪趾顶端形状与土体形状接近,这种构形有利于缓释应力集中,增加爪趾的机械强度,易于脱附,还可提高耐磨性。据生物进化和仿生耦合理论可知,蝼蛄爪趾必然具有优化的构形,能最大限度地减小楔入土壤时的阻力。
1.2 蝼蛄爪趾侧面轮廓点抓取和拟合
为方便仿生技术应用于农业机械,本文仅获取蝼蛄爪趾第一趾的侧面轮廓线。将蝼蛄前足胫节爪趾第1趾的体视显微镜照片以光栅图像的形式导入AutoCAD软件中,调整适当后使用样条曲线命令描绘爪趾第1趾的内外侧轮廓。图2中绿色曲线为轮廓描绘样条曲线。
将轮廓点数据导入到EXCEL软件进行二项式拟合,式(1)和式(2)分别为蝼蛄爪趾的内外侧曲线进行拟合方程,拟合度分别为0.9832和0.9975。拟合后的曲线如图3所示。
y=-0.0044x2+0.9633x+48.002
R2=0.9832
(1)
y=-0.0057x2+1.6547x-30.531
R2=0.9975
(2)
1.3 仿生挖掘铲的建立
为体现马铃薯仿生铲挖削土壤减阻的优势,应用Solidworks软件对两种挖掘铲铲片进行建模。仿生铲片入土端两边仿蝼蛄趾尖部端部倒30°角,为加强仿生铲片与挖掘机连接强度,模型后端设计有3个六角头螺钉的柱形沉头孔。仿生铲片如图4(a)所示。仿生挖掘铲组件如图4(b)所示。
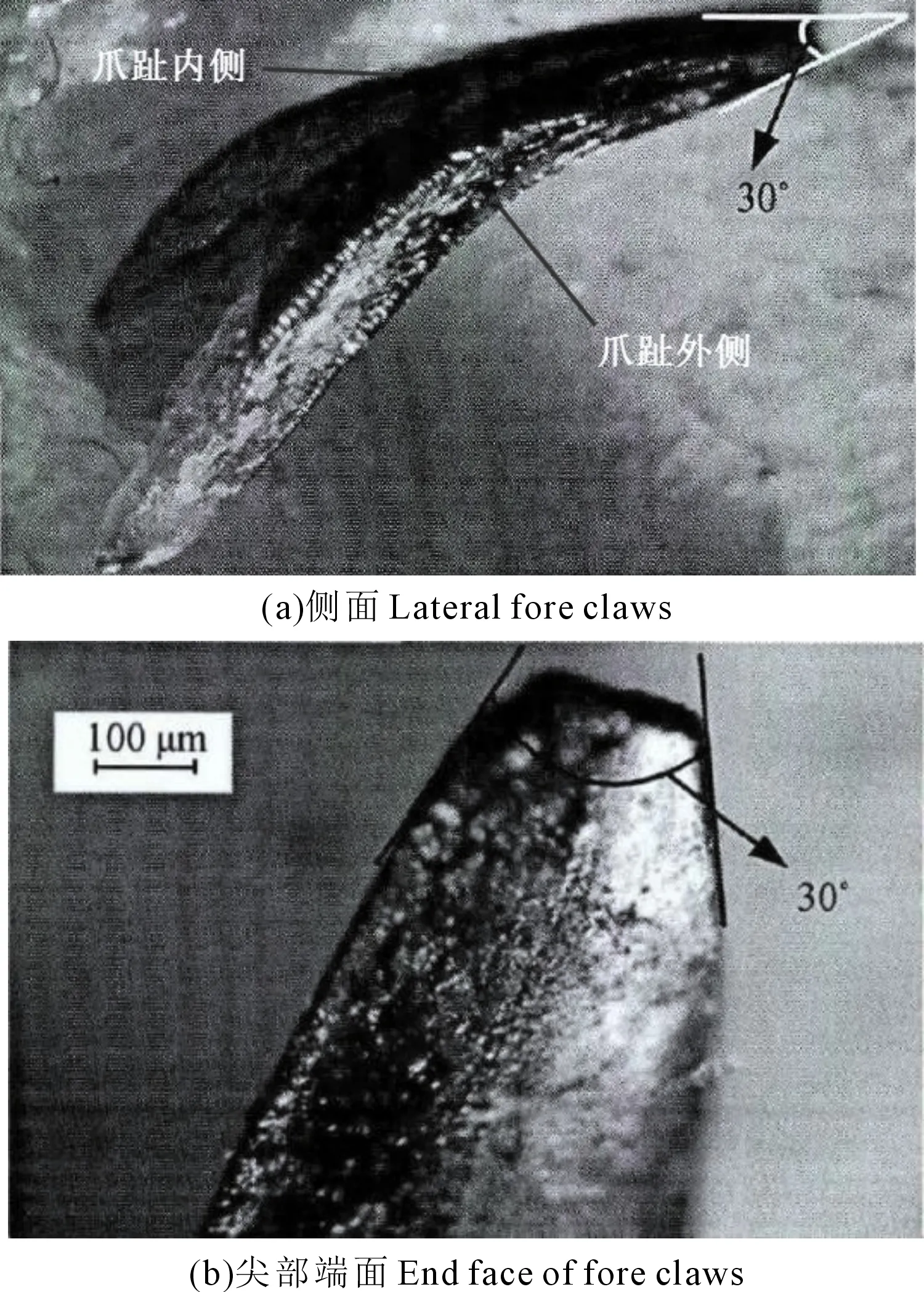
图1 蝼蛄前足爪趾Fig.1 The forefoot claw toe of the mole cricket

图2 轮廓描绘界面Fig.2 Interface of tracing contour

图3 侧面轮廓线的拟合曲线Fig.3 The fitting curve of contour line of profile
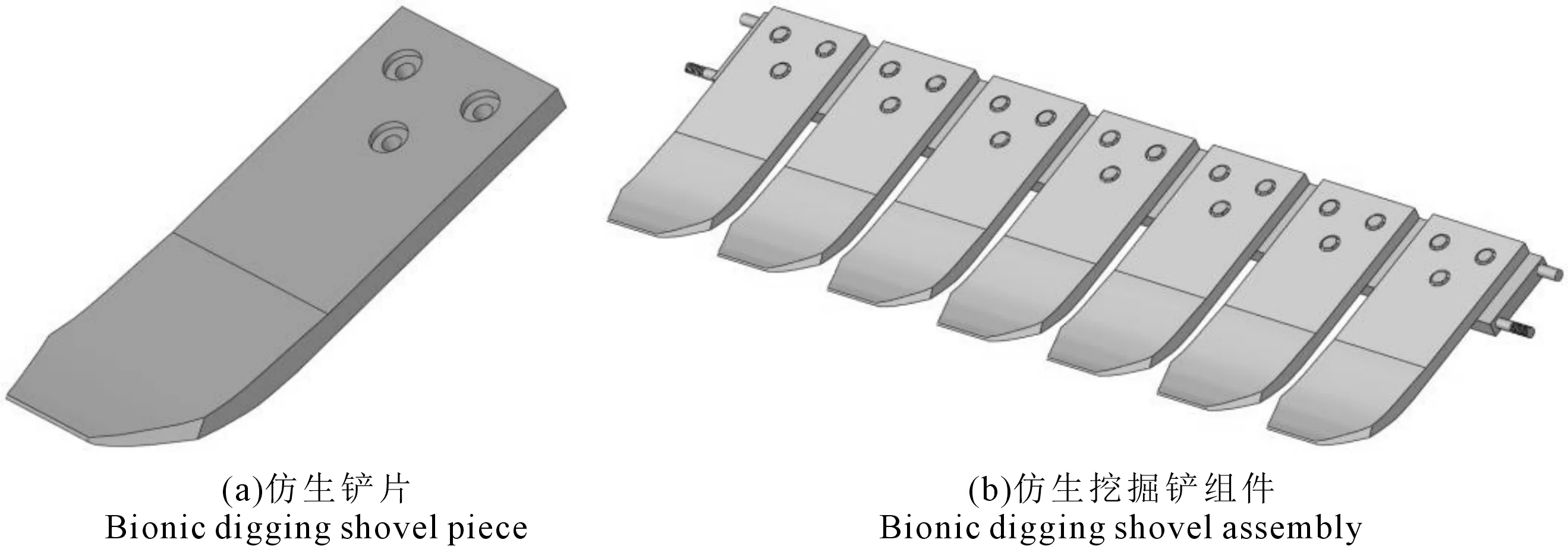
图4 仿生挖掘铲Fig.4 The bionic digging shovel
2 仿真模型
2.1 土壤细观参数确定
本文使用EDEM软件默认的Hertz Mindlin无滑动接触模型和Hertz Mindlin粘结接触模型来模拟甘肃耕地土壤力学特性。通过设置不同的法向、切向临界强度及颗粒的粘结半径可模拟不同含水率条件下颗粒之间粘结力的约束强度,当外界力大于这个强度时(法向或切向),颗粒之间的约束即可破坏。破坏后的颗粒以Hertz Mindlin无滑动接触模型相互作用。
借助离散单元法软件建立土模时,由于土壤结构的复杂性,需用多个土壤接触模参数表征其特性,如土壤颗粒半径、密度、泊松比、剪切模量、弹性恢复系数、动静摩擦系数。参考相关文献得到的参数如表1所示。
2.2 土壤核心参数确定
2.2.1 临界法向应力和临界切向应力 本试验采用CMT2502型电子万能试验机对土壤试样进行单轴压缩试验(土壤试样法向和切向)。试验前先将配制好的土样制成土力学标准圆柱体试件(直径为39 mm,高为80 mm)[13],再将试件安装在压缩仪上,并在试件周围涂一层凡士林防止水分蒸发。调整试件与加压柱刚好接触,设置应力与位移均为0,圆柱压头以10 mm·min-1的速度对试件进行加压,直到试件破裂或滑移散掉为止。软件自动记录其应力与位移的变化值。试验过程如图5所示。
通过土壤的单轴压缩试验可知,所测得的土壤含水率为15%土壤法向最大黏结应力约为30 kPa,切向最大黏结应力约为16 kPa,即临界法向应力和临界切向应力。同时参考文献[9]仿真土壤颗粒黏结参数如表2所示。
2.2.2 黏结半径 在进行黏结半径计算时,需假设在一定体积的土壤中,除土壤颗粒所占体积外,其余的体积均由产生颗粒间黏结力的水分占有。
(3)
式中,m1为土壤颗粒质量(kg);m2为水分的质量(kg);ρ1、ρ2分别为土壤和水的密度(kg·m-3);v1、v2分别为土壤颗粒和水所占体积,m3;R1、R2分别是土颗粒和黏结半径(m)。
土壤颗粒半径R1=0.001 m,土壤颗粒密度ρ1=2680 kg·m-3,水密度ρ2=1000 kg·m-3。将其带入式(3)可得土壤模型的黏结半径R2=0.0013 m。
2.2.3 时间步和栅格尺寸倍率 时间步越小计算越精确,但会增加计算时间。EDEM时间步一般是瑞利时间步的5%~30%,由于接触密度较高,该值设置为20%,软件自动算出仿真时间步为0.14 ms;为节省仿真空间,需设置栅格单元尺寸,当栅格尺寸为2.2倍土壤颗粒半径时,栅格数目不超过100000个,因此,设置栅格尺寸倍率为2.2[14]。

表1 材料力学特性[11-12]

表2 土壤颗粒黏结参数Table 2 The parameters of the soil particles adhesion
2.3 仿真模型的建立
为节约仿真时间、同时考虑到整个仿生挖掘铲所受挖掘阻力为7个挖掘铲片之和,仿真之前对仿生挖掘铲进行简化,只对一个仿生挖掘铲片进行仿真。建立土壤模型时先建立一土槽用于盛放土壤颗粒,长700mm,宽300mm,高250mm。土槽体积一定时,土壤颗粒的半径大小决定颗粒数。为使仿真更接近实际情况,土壤颗粒半径取0.5mm。据土槽体积、土壤孔隙率及土壤颗粒体积估算大约需80000个土壤颗粒填充土槽。马铃薯模型尺寸统计及建立参考文献[15]。据甘肃定西马铃薯种植分布情况,使马铃薯模型在土壤模型深180mm,200mm间隙借助EDEM粒子工厂产生。为使土壤颗粒充分接触,土壤颗粒填充土槽时需给土槽一定频率和振幅的振动。土壤颗粒生成结束需花1.8s时间,因此,在土壤颗粒填充土槽是以频率0.3Hz,振幅4mm振动。
3 仿真及结果分析
3.1 仿真挖掘过程
本文借助离散单元法EDEM软件对仿生挖掘铲挖削土壤过程进行研究。仿真目的在于观察挖掘铲挖削土壤过程,分析受挖掘阻力、碎土性能等问题。
如图6(a~f)为仿生挖掘铲片以0.7m/s 的速度前进时挖削土壤的过程。随着铲片前进,土壤在水平方向被铲尖切割分开;随铲片继续前进,铲片上面的土壤依次经过切削、折弯、破碎等土壤细化过程,黏结力破坏后土壤颗粒沿铲面上升。由图6看出土壤颗粒的上升速度较高,证明仿生挖掘铲具有较好的碎土性能,有利于提高马铃薯挖掘机分离装置的工作效率;同时可以由图6可以看出,铲片挖削过的土壤产生了土沟,一方面由沿铲片间漏掉的土壤颗粒补充,另一方面由马铃薯挖掘机分离装置分离出的土壤填充。同时看出,沟侧被破坏的土壤颗粒沿沟壁以一定的速度落至沟底。
3.2 减阻机理及碎土性能分析
为说明仿生铲片减阻机理,对仿生挖掘铲和普通挖掘铲进行受力分析比较,如图7所示。
对仿生铲片进行受力分析如下式所示:
水平方向的分力为:
(1)
垂直方向的分力为:
(2)
在铲片入土角度一定的条件下,即土壤摩擦角γ一定,由式(1)和(2)可知,铲片水平方向阻力与铲片的入土角有直接关系,且呈第一象限增大趋势。通常在挖掘铲的设计中通过减小入土角ψ来降低挖削阻力,但ψ越小,挖掘铲越易磨损。由图7可知,仿生铲片与土壤接触表面有一半以上有曲率过渡,且入土角ψ从仿生铲尖处至铲后端由小变大。由公式(1)可知,仿生铲片减小了在水平方向上的阻力,同时,有一定曲率的曲面有利于于碎土,使土壤颗粒沿铲片间间隙漏下,减小了挖掘铲阻力。
3.3 减阻性能分析
为分析仿生铲片较普通铲片挖掘土壤时有较好的减阻性能,在与仿真铲片仿真条件一定的条件下,建立普通挖掘铲挖削土壤离散元模型。仿真结束后对两种铲片在挖掘土壤过程中水平方向及重力方向受力变化曲线进行测量,测量结果如图8所示。图8(a)为两种铲片挖掘土壤时水平方向所受到的阻力曲线图,仿生铲片较普通铲片阻力较小,且减小了11.36%;仿生铲片垂直方向所受的力也减小了,较普通铲片减小了17.65%。由公式(2)可知,仿生铲片垂直方向受力随仿生铲片曲率变化增大,但仿生铲片曲率变化有利于碎土,产生的碎土沿铲边漏下,既降低仿生铲片整体的阻力,也减轻了马铃薯挖掘机分离装置负荷。
仿生挖掘铲片内侧曲面曲率沿纵向变化不大,而外侧的曲率在靠近趾尖拐角处曲率较大,越靠近后端曲率越小。地面力学的试验表明,犁体在犁翼部分曲率大而在犁铧部分曲率小将有利于脱土。说明仿生挖掘铲片曲率的变化规律有利于脱土。
3.4 土壤颗粒黏结力破坏分析
两种铲片挖掘土壤仿真结束后,统计土壤颗粒黏结数可知:土壤模型初始黏结数为133803,仿生铲片挖掘土壤后颗粒间存在的黏结数49831,普通铲片挖掘后的土壤颗粒黏结数为53407。就土壤颗粒间黏结破坏程度可知,仿生铲片对土壤颗粒间黏结力的破碎率达62.76%,而普通铲片对其破坏率为60.08%。因此,与普通铲片相比,仿生铲片碎土效果较好。
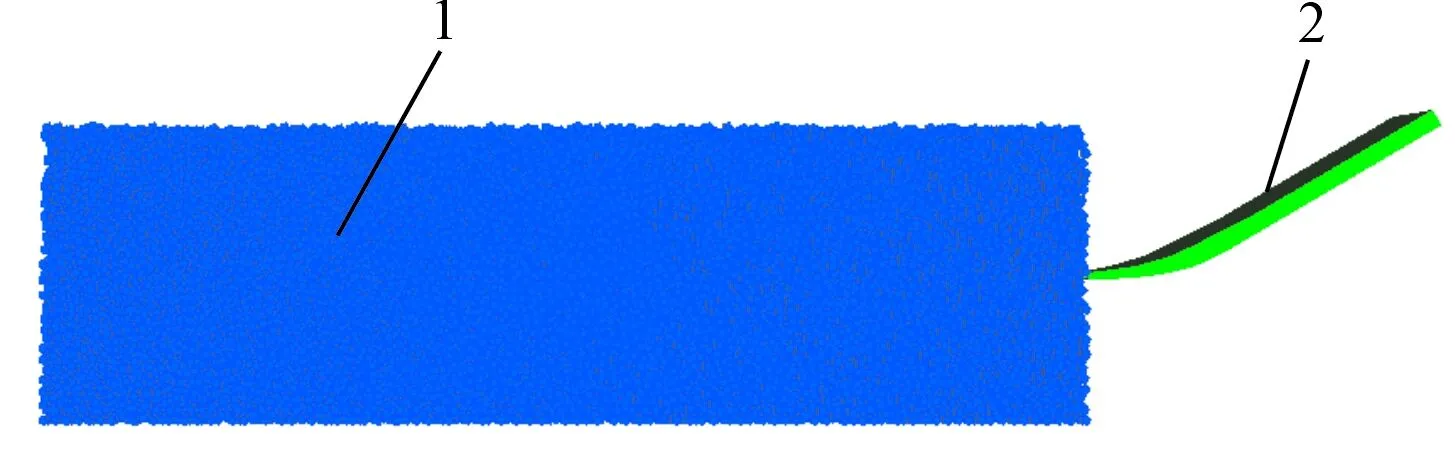
1.土壤模型 Soil model;2.仿生挖掘铲 Bionic digging shovel图5 仿生挖掘铲挖掘土壤模型Fig.5 The excavating soil model by the bionic digging shovel
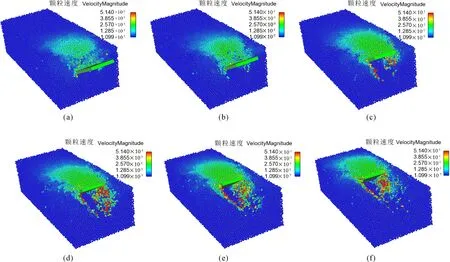
注:铲片以0.7m/s的速度前进。土壤颗粒颜色代表土粒速度大小,红色代表速度高,蓝色代表速度低,绿色代表处于中间速度。Note: The shovel moves at the speed 0.7m/s. The color of soil particles represents the velocity of soil particles, red represents a high speed, blue represents a low speed, and the green represents the middle velocity.图6 仿生铲片切削土壤仿真过程Fig.6 Simulation process of bionic digging shovel cutting soil
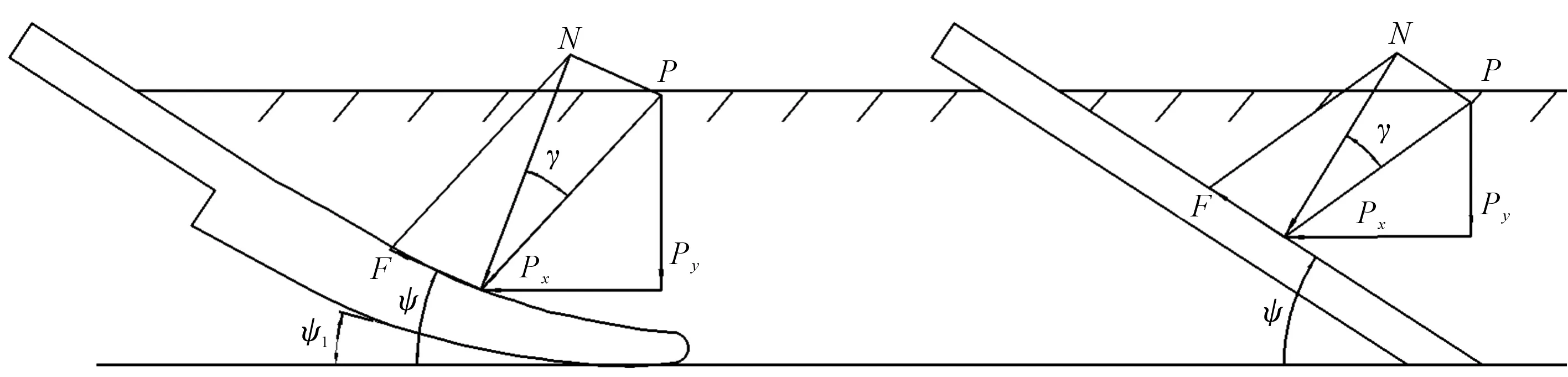
N-土壤对挖削面的作用力(N),N;F-挖削面对土壤摩擦力(N),N;P-N与F其合力为总阻力(N),N;γ-摩擦角(°);ψ-铲片的入土角(°)。 N is soil digging force(N); F is soil friction by digging and cutting(N); P is the total resistance between N and F(N); γ is friction angle(°); ψ is shovel penetrating soil angle(°).图7 两种铲片挖掘土壤受力分析图Fig.7 The force analysis chart of two kinds of shovel excavated soil
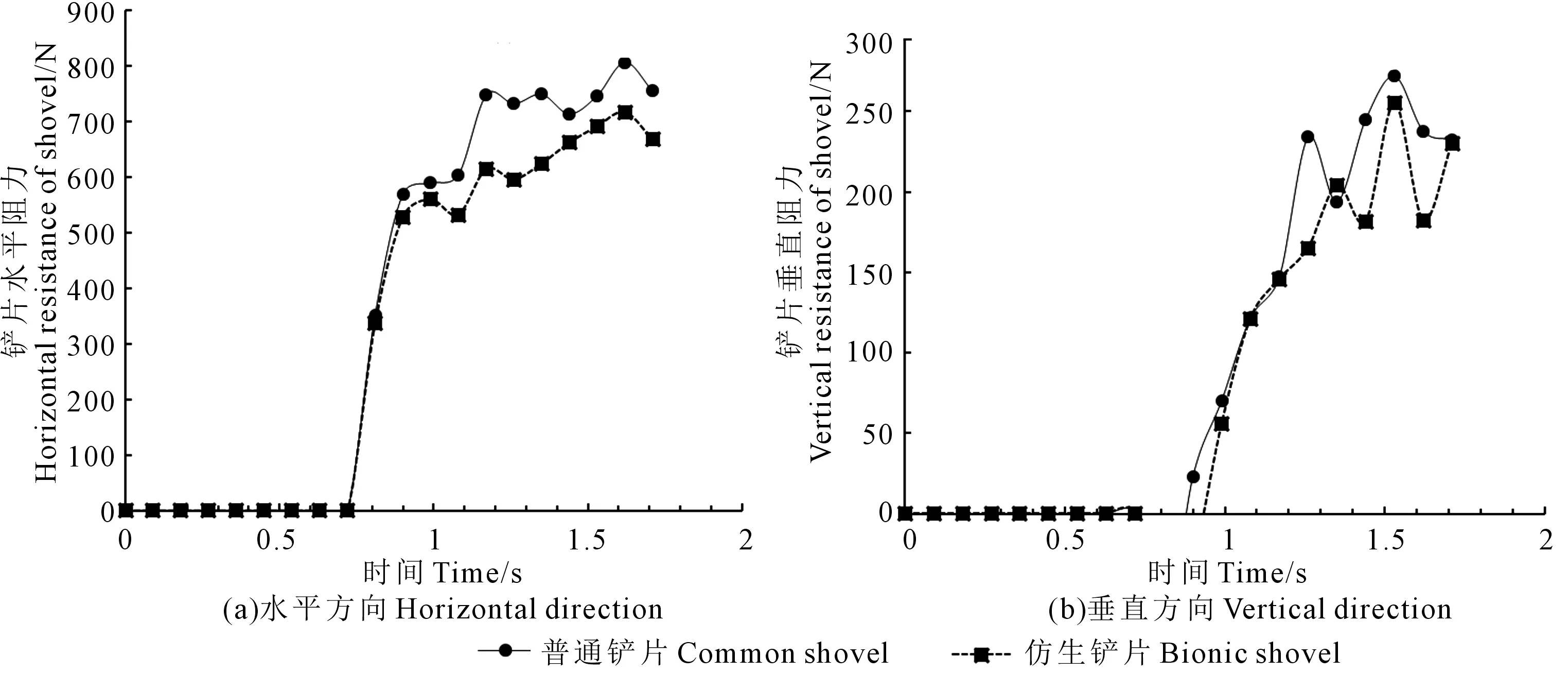
图8 两种铲片受力曲线Fig.8 The force curves of two kinds of shovel slice
4 结 论
本文对所设计的马铃薯挖掘机仿生挖掘铲铲片进行了基于离散单元法土壤挖掘数值模拟。主要分析了仿生铲片减阻和碎土机理和性能。仿真结果表明:仿生铲片较普通铲片在挖掘土壤时水平向和重力向受力均减小,水平阻力减小了11.36%,垂直向受力减小了17.65%;普通铲片、仿生铲片对土壤颗粒间黏结力的破碎率分别为60.08%、62.76%。分析原因可知,仿生铲片较普通铲片曲率变化大有利于碎土和排土。
参考文献:
[1] 鲁振.小型马铃薯收获机械技术问题的探讨[J].农业技术与装备,2007(8):26-26.
[2] 任露泉,李建桥,陈秉聪. 非光滑表面的仿生降阻研究[J]. 科学通报,1995,40(19):1812-1814.
[3] 郭志军,周志立,徐东,等. 高效节能仿生深松部件的试验[J]. 河南科技大学学报,2003,24(23):1-3.
[4] 郭志军,杜干,周志立,等. 土壤耕作部件宏观触土曲面减阻性能研究现状分析[J]. 农业机械学报,2011,42(6):47-52.
[5] 任露泉,徐晓波,陈秉聪. 典型土壤动物爪趾形态的初步分析[J]. 农业机械学报,1990,21(2):44-49.
[6] Yong R N, Hanna A W. Finite element analysis of plane soil cutting [J]. Journal ofTerramechanics, 1977, 14(3): 103-125.
[7] Liu S H, Sun D A, Wang R. Numerical study of soil collapse behavior by discrete element modeling[J]. Computers and Geotechnics,2003, 30(5): 399-408.
[8] 李艳洁,徐泳. 土壤试样单轴压缩试验与离散元法模拟对比研究[J]. 中国农业大学学报,2009,14(4):103-108.
[9] 于建群,钱立彬,于文静,等. 开沟器工作阻力的离散元法仿真分析[J]. 农业机械学报,2009,40(6):53-57.
[10] 李艳洁,吴 腾,林剑辉,等. 基于离散元法的贯入圆锥对沙土颗粒运动特性分析[J]. 农业工程学报,2012,28(24):55-61.
[11] 南京水利科学研究院土工研究所. 土工试验技术手册[M]. 北京:人民交通出版社,2007:33-49.
[12] Boac J M, Casada M E, Maghirang R G, Harner J P I. Material and interaction properties of selected grains and oil seeds for modeling discrete particles[J]. Transactions of the Asabe, 2010, 53 (4): 1201-1216.
[13] 李艳洁,徐泳. 土壤试样单轴压缩试验与离散元法模拟对比研究[J]. 2009,14(4):103-108.
[14] 孙其诚,王光谦. 颗粒物质力学导论[M]. 科学出版社,2009:59-67.
[15] 石林榕,赵武云,吴建民, 等. 切片造型技术在农产品有限元分析中的应用[J]. 中国农机化学报,2013,34(3):95-98.
猜你喜欢
广西糖业(2022年1期)2022-03-31
昆明医科大学学报(2022年1期)2022-02-28
昆明医科大学学报(2021年12期)2021-12-30
汽车工程(2021年12期)2021-03-08
装备制造技术(2020年3期)2020-12-25
英语文摘(2020年10期)2020-11-26
课外语文·中(2019年9期)2019-11-03
故事作文·低年级(2019年4期)2019-04-17
中山大学学报(自然科学版)(中英文)(2018年6期)2018-12-05
东方教育(2017年19期)2017-12-05
