激光测距通信一体化技术研究及深空应用探索
2018-07-02 10:01:06刘向南李英飞向程勇谌明李晓亮
深空探测学报 2018年2期
刘向南,李英飞,向程勇,谌明,李晓亮
(北京遥测技术研究所,北京 100076)
0 引 言
深空探测是对月球及以远的天体或空间开展的探测活动,是人类了解地球、太阳系以及宇宙,揭示其起源、演变,拓展生存空间的必然选择。我国的深空探测随着探月工程的立项实施而掀开序幕,并着手启动了首次火星探测任务[1-3]。
深空探测活动与方式的多样化和复杂化,对深空测控通信提出了新的挑战。为了解决深空测控通信的超远距离与高速数传之间的矛盾,深空测控通信已经从S、X扩展到Ka频段,但仍难以满足未来深空探测的任务需求[2]。激光测距通信一体化技术以激光光束为载体,将测距和通信信息共用同一束激光和硬件平台,实现同一套设备完成测距和通信双重功能,可适应未来深空探测活动对高速率通信、高精度测距的任务需求,是深空测控通信的重要发展方向。目前,美国已经成功实施月地高速激光通信与高精度测距的在轨演示验证[4],为我国未来深空测控通信系统的建设提供了参考和借鉴。
1 研究现状
国外自20世纪60年代中期开始实施空间激光通信技术研究计划以来,经过50多年的发展,在星间、星地激光链路领域取得了显著的成就[5-10]。随着激光通信和测距一体化需求的不断提高,目前,国外空间激光链路中已经呈现出激光测距与通信一体化的发展趋势。其中,较为典型的系统是美国的X2000系统、俄罗斯GLONASS(Global Navigation Satellite System)导航系统和美国的月球激光通信验证(Lunar Laser Communication Demonstration,LLCD)系统。
1)美国X2000系统
X2000系统于1997年10月开始研制,原计划于2001年4月完成。X2000终端具备激光通信和激光测距功能。在飞行终端结构设计中,测距和通信共用信号光,采用应答测距体制,实现激光通信与激光测距的复用,数据传输速率为100~400 kbit/s。由于X2000项目最终预算不足,只完成了飞行终端的结构设计,其飞行终端框图如图 1所示[11-12]。
2)俄罗斯GLONASS导航系统
2005年,俄罗斯计划在GLONASS-K卫星装载星间激光导航通信系统并开展在轨试验,该卫星搭载2套星间激光导航通信系统,以保证其具备与GLONASS导航星座中任意2颗卫星进行独立协同的能力。GLONASS-K卫星建立了国际首个星间激光链路,采用脉冲激光体制实现星间高精度测距(测距精度10 cm)和中等速率数据交换(通信速率50 kbit/s),通信误码率优于10–4,链路建立最快时间小于10 s。GLONASS系统卫星激光链路构型如图 2所示[13]。受脉冲激光的重复频率和峰值功率限制,使得脉冲激光测距通信体制很难进一步提升通信速率,因此该种体制不适用于对通信速率要求较高的激光链路。

图1 X2000飞行终端结构设计示意图Fig.1 Illustration of the X2000 flight terminal

图2 GLONASS激光链路构型Fig.2 Configuration of GLONASS laser link
3)美国LLCD系统
2013年9月,月球激光通信星载终端(Lunar LasercomSpace Terminal,LLST)搭载于月球大气和尘埃环境探测航天器(Lunar Atmosphere and Dust Environment Explorer,LADEE)发射升空。2013年10月—11月之间完成了为期1个月的月地激光通信在轨试验,下行速率622 Mbit/s和上行速率20 Mbit/s,上行信号采用4PPM调制、下行信号采用16PPM调制,工作波长为1.55 μm波段。LLCD系统组成如图 3所示[14]。其中,地面站采用5 GHz高精度时钟对下行链路激光脉冲边沿进行采样,单次采样的测距精度为6 cm(200 ps),通过多次测量取平均可实现优于1 cm的测距精度[4,14],充分验证了激光链路在深空高速数传和高精度测距方面的巨大潜力,为深空激光测距通信一体化设计提供了参考。

图3 LLCD系统的组成Fig.3 Composition of LLCD system
4)国内现状
国内在激光测量通信一体化技术方面也开展了相关研究,主要集中在星地和星间激光链路应用,未涉及深空应用场景。其中,北京跟踪与通信技术研究所在国内率先提出了激光统一测控系统的概念[15];电子科技大学、长春理工大学先后对星地和星间激光测距通信一体化技术进行了理论研究[16-17];北京遥测技术研究所于2014年率先完成了基于相干激光通信的测距与高速通信一体化实验验证。
2 激光测距通信一体化设计
2.1 激光通信体制选取
为充分发挥激光链路在高速通信和精密测距方面的优势,激光测距通信一体化设计原则是以高速通信为主适度兼顾精密测距。俄罗斯GLONASS导航系统采用的脉冲激光测距通信体制受脉冲激光重复频率的限制,很难进一步提升通信速率。美国LLCD系统采用的基于PPM(Pulse Position Modulation)通信体制的测距技术,因其在地面站使用了需要在3 K超低温条件下工作的超导纳米线单光子探测阵列进行接收[18],使得该测距通信一体化技术适用于月地及月地以远的对地激光链路,难以应用到星际之间及深空星间的激光链路。
目前,空间激光通信的主用体制主要包括OOK(On-Off Keying)调制/直接探测、PPM调制/直接探测两种非相干探测体制,DPSK(Differential Phase Shift Keying)调制/自差相干接收体制、BPSK(Binary Phase Shift Keying)调制/相干接收体制两种相干探测体制。其中,OOK调制/直接探测体制接收解调技术简单,但探测灵敏度较低;PPM调制/直接探测体制带宽利用率低,不利于星间高速率、高灵敏度通信;BPSK调制/相干探测体制具有较高的接收灵敏度和抗背景干扰能力,是星间高码率激光通信链路的首选;DPSK调制/自差相干探测体制的探测灵敏度介于OOK调制/直接探测体制和PSK(Phase-Shift-Keying)调制/相干探测体制之间,可自动补偿大气湍流的影响,适于星地高速激光通信。
综合比较上述通信体制在码率扩展、探测灵敏度、抗背景光干扰能力等方面的特点,本文选取BPSK调制/外差相干接收的通信体制通过在传输信息中插入测距帧实现测距通信一体化,并利用双向单程测距方法实现双端的精密测距。
BPSK调相激光信号表达式为

其中:Ac表示激光载波的振幅;表示调制信号;表示激光载波频率;c表示光速;表示激光载波初相。

2.2 双向单程测距原理
以星间激光链路为例,卫星A和卫星B之间双向单程测距(Dual One-Way Ranging,DOWR)原理描述如图 4所示[19]。A、B卫星在各自星钟秒脉冲下产生采样标志M时开始计时,并通过距离为R的激光链路发送给对方卫星。当卫星收到对方采样标志后,计时结束。综合2个计时TA和TB可推算出A、B两星之间的距离。需注意的是,在实际测距中,两星星钟存在时差Δt、发送时延τt、接收时延τr。

图4 双向单程测距原理图Fig.4 Schematic diagram of DOWR
假设时差则实际计时可表示为

可得DOWR体制测距值为

测得两星星钟时差为

其中:和可通过系统零值标定的方法消除。因此,可以认为距离R、时差Δt的测量精度由TA和TB的测量精度所决定。
本文激光测距方案采用码元相位同步测距,其工作原理如图 5所示,具体可描述为:激光终端发射端采用MZM(Mach-Zehnder Modulator)调制器和自动偏置控制实现BPSK激光调制,基于卫星平台的星钟倍频产生工作时钟,调制端在同步脉冲(整秒时刻)下,由测距编码模块产生基带数据;调制的基带数据帧帧头后沿与同步脉冲对齐,作为测距标识;数据帧中插入解调到的“计时”信息,作为合作卫星的距离解算输入;基带数据经电光调制后准直成空间光进行传输。接收端对空间光进行探测完成光电转换,并对同步后的电信号进行采样、码同步、帧同步等一系列处理,由码同步产生的码元相位提供解调数据的帧头后沿(测距标识),并在NCO(Numerically Controlled Oscillator)时标模块中进行比对,完成高精度“计时”。帧同步模块解调出合作卫星的“计时”信息输出到距离解算模块,距离解算模块再结合本地“计时”信息根据DOWR公式计算出测距值。
码元相位测距的核心是码同步环,由码同步环对输入基带信号跟踪,确定精确的测距脉冲时刻。码元相位测距利用数据帧头作为采样标志,该标志的产生和星钟整秒时刻(1PPS)对齐。由此,测量计时T的计算公式为

其中:FrCnt是数据帧帧计数,用于长距离解模糊;FrLength是帧长;BitCnt是位计数;ChipNCO是码片相位;NCOword是码环NCO的相位寄存器位数;VRate为码片速率。
3 激光测距通信系统实验及结果分析
3.1 激光测距通信系统实验方案
根据前文设计的激光测距通信一体化方案,在实验室内构建了星间激光测距通信验证系统,其组成框图如图 6所示,实验现场如图 7所示。该实验系统由2套激光测距通信设备组成,主要包括激光通信发射模块、激光通信接收模块、数字解调模块、光学天线、GPS驯服时钟、电控一维运动平台、误码测试仪。
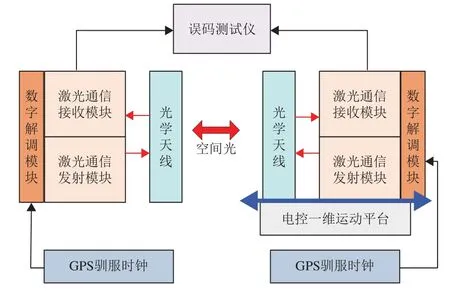
图6 星间激光测距通信一体化实验验证系统组成框图Fig.6 Block diagram of integrated inter-satellite laser ranging and communication experimental verification system

图7 激光测距通信一体化实验验证系统实验现场图片Fig.7 Integrated laser ranging and communication experimental verification system
实验系统采用BPSK调制/外差相干接收体制,通信波长选用1 550 nm。实验过程中,在GPS驯服时钟的驱动下,由电信号调制单元产生带LDPC(Low-Density Parity-Check)编码的测距帧数据,经MZM电光调制器对1 550 nm发射激光进行BPSK相位调制。由光学天线把调制光信号发射到自由空间。1 550 nm信号光经过一段距离的自由空间传输后,入射至光学接收天线,与本振光在180 °光纤光混频器中相干混频,并由180 °平衡探测器探测,产生中频电信号。该中频电信号经过放大、滤波处理后,由高速ADC(Analog to Digital Converter)采样后在FPGA(Field Programmable Gate Array)内完成载波同步、码元同步、帧同步和译码,并进行误码率测试。与此同时,通过解调获取对方激光终端的测量标识时刻,并对本地发射编码器的相位进行采样,从而提取测距值。该相位采样信息和其他测量信息组成测距信息,将其插入传输数据帧中。待测距帧编码完成后通过DAC(Digital to Analog Converter)转换成基带信号对发射激光载波进行调制。
3.2 实验结果及分析
利用图 7所示的实验系统对BPSK调制/外差相干体制1 Gbit/s通信速率的接收灵敏度进行了测试。实验结果表明,未采用编译码时该激光通信系统在10–8误码率条件下,接收灵敏度为44 光子/bit,而外差接收散弹噪声量子限为16 光子/bit,外差相干接收实测灵敏度与量子限相差近4.4 dB。采用编译码技术后,接收灵敏度获得提高,实测结果如图 8所示。测试结果表明在传输码率为1 Gbit/s的条件下,采用7/8LDPC编码后,10–8误码率对应的接收灵敏度为11 光子/bit,获得编码增益6.02 dB。

图8 相干激光通信接收灵敏度测试曲线Fig.8 Reception sensitivity curve of coherent laser communication
本实验系统的参考时钟采用的是GPS驯服的恒温晶振,开机10 min后,驯服准确精度可以达到10–10量级。在相对距离不变的条件下,采用双向单程测距体制时,测量两端的单向测距值变化情况如图 9(a)所示。图 9(a)中两条测试曲线的距离值随测量时间发生改变。其中,终端A的测距值逐渐减小,而终端B的测距值却逐渐增大。经分析,上述距离值的变化是由于测量两端的参考时钟存在频差引起的。
根据双向单程测距原理,经数据处理后得到双向单程测距值和测距均值的变化曲线,如图 9(b)所示,测量值的均方根值为0.85 mm,与恒温晶振的秒稳指标一致。

图9 基于BPSK外差相干激光通信的测距曲线Fig.9 Laser ranging results of BPSK heterodyne laser communication
在距离不变的情况下,双端的频差可以表示为

其中:fA为终端A的参考频率;fB为终端B的参考频率;R1A为A端当前时刻测得的单向测量值;R0A为A端前一时刻测得的单向测量值;L为空间光在本时间段内传输的距离。
图9(c)为双向单程测量得到的频差变化曲线。图中在680 s附近出现了频率跳变。经分析这是由于GPS驯服时钟控制环路进行频率调整而引起的。
本实验完成了BPSK调制/外差相干激光通信与测距一体化的测试验证,基于双向单程测距,在传输码速率为1 Gbit/s的同等条件下,采用7/8LDPC编码后,对应10–8误码率的通信接收灵敏度达到11 光子/bit,测距精度达到0.85 mm。
4 深空应用探索
在实际深空应用中,因链路两端的相对运动引起的光载波多普勒频移量高达0.1 nm,这就要求基于BPSK调制/外差相干探测的激光测距通信一体化技术对光载波多普勒频移进行有效补偿。此外,尽管BPSK调制/外差相干探测的灵敏度较高,但仍低于单光子探测灵敏度。因此,在月地及以远深空激光链路中应慎用相干探测体制。对于地球中继或月球中继激光通信链路,BPSK调制/外差相干激光通信技术将更能发挥高灵敏度接收和抗背景光干扰等优势。
根据月地一体化空间信息传输系统的组成(如图 10所示)及约束条件,结合基于BPSK调制/外差相干通信的激光测距通信一体化特点,该技术可应用于如下任务场景。

图10 地月一体化空间信息系统组成Fig.10 Composition of integrated of the Earth and the Moon space information system
1)月球中继卫星系统:为月球基地或月面着陆器等提供数据传输中继服务。应用场景包括月地系统的第1拉格朗日点(L1点)与月面着陆器或月球基地的高速中继通信、第2拉格朗日点(L2点)与月背着陆器或月球基地的高速中继通信[20-21]。
2)月球导航卫星系统:为月球基地、月面着陆器或环月飞行器等提供空间导航服务[22]。应用场景包括月球导航卫星与第1拉格朗日点(L1点)中继卫星、第2拉格朗日点(L2点)中继卫星之间的测距通信,以及月球导航卫星与月面陆器或月球基地之间的测距通信。
5 结束语
激光测距通信一体化技术是未来深空测控通信的重要发展方向,国外已经完成在轨演示验证,而我国还没有对月球及深空探测器实施激光测距通信一体化的成功先例。
本文提出的基于BPSK外差相干通信的测距通信一体化技术通过了地面实验系统的测试,验证了激光测距通信一体化技术的可行性,并对该技术在月球中继卫星系统和月球导航卫星系统中的应用进行了初步探讨,相关研究工作仍需进一步深入推进。
基于BPSK外差相干通信的测距通信一体化技术的实施和应用有望大幅提升我国深空探测传输系统的通信能力和测距能力。结合我国探月及深空探测任务,建议我国科技工作者应当把握国家探月工程快速发展的契机,尽快将相关技术推广到月地一体化空间信息传输系统的建设中,早日发挥激光测距通信一体化技术的重要作用。
[1]吴伟仁,于登云.深空探测发展与未来关键技术[J].深空探测学报,2014,1(1):5-17.WU W R,YU D Y.Development of deep space exploration and its future key technologies[J].Journal of Deep Space of Exploration,2014,1(1):5-17.
[2]吴伟仁,董光亮,李海涛,等.深空测控通信系统工程与技术[M].北京:科学出版社,2013:1-12.WU W R,DONG G L,LI H T,et al.Engineering and technology of deep space TT&C system[M].Beijing:Science Press,2013:1-12.
[3]于登云,吴学英,吴伟仁.我国探月工程技术发展综述[J].深空探测学报,2016,3(4):307-314.YU D Y,WU X Y,WU W R.Review of technology development for Chinese lunar exploration program[J].Journal of Deep Space Exploration,2016,3(4):307-314.
[4]BOROSON D M,ROBINSON B S,MURPHY D V,et al.Overview and results of the lunar laser communication demonstration[J].Proceeding of SPIE,2014(8971):89710S.
[5]CORNWELL M D.NASA’s optical communications program for 2015 and beyond[J].Proceeding of SPIE,2015(9354):93540E.
[6]LUZHANSKY E,EDWARDS B,ISRAEL D,et al.Overview and status of the laser communication relay demonstration[J].Proceeding of SPIE,2016(9739):97390C.
[7]TOYOSHIMA M,FUSE T,DIMITAR R K,et al.Current status of research and development on space laser communications technologies and future plans in NICT[C]//IEEE International Conference on Space Optical Systems and Applications (ICSOS).New Orleans,LA,USA:IEEE,2015:1-5.
[8]HEINE F,MÜHLNIKEL G,ZECH H,et al.LCT for the European data relay system:in orbit commissioning of the ALPHASAT and sentinel 1A LCTS[J].Proceeding of SPIE,2014(9354):93540G.
[9]CHISHIKI Y,YAMAKAWA S,TAKANO Y,et al.Overview of optical data relay system in JAXA[J].Proceeding of SPIE,2016(9739):97390D.
[10]GRIGORYEV V,KOVALEV V,SHARGORODSKIY V,et al.Highbit-rate laser space communication technology and results of on-board experiment[C]//Proceeding of International Conference on Space Optical Systems and Applications (ICSOS).Kobe,Japan:IEEE,2014:1-3.
[11]HEMMATI H.Status of free-space optical communications program at JPL[J].Aerospace Conference Proceedings of IEEE,2000(3):101-105.
[12]HEMMATI H.Deep space optical communications[M].Hoboken:A John Wiley & Sons,INC.,Publication,2006:22.
[13]PASYNKOV V V,SADOVNIKOV M A,SUMERIN V V,et al.The concept and preliminary results of use of satellite laser ranging for GLONASS accuracy improvement[C]//The 18th International Workshop on Laser Ranging.Fujiyoshida,Japan:ILRS,2013.
[14]BOROSON D M,ROBINSON B S.The lunar laser communication demonstration:NASA’s first step toward very high data rate support of science and exploration missions[J].Space Science Reviews,2014(185):115-128.
[15]邢强林,李舰艇,唐嘉,等.激光载波统一系统方案构想[J].飞行器测控学报,2009,28(2):36-44.XING Q L,LI J T,TANG J,et al.Conception of a unified laser TT&C system[J].Journal of Spacecraft TT & C Technology,2009,28(2):36-44.
[16]胡玮,蒋大钢,邓科,等.无线激光通信与测距一体机的测距精度分析[J].红外与激光工程,2008,37(S3):245-248.HU W,JIANG D G,DENG K,et al.Accuracy analysis on a prototype which combined with optical wireless communication and laser range finding[J].Infrared and Laser Engineering,2008,37(S3):245-248.
[17]赵馨,牛俊坡,刘云清,等.导航卫星中激光通信测距一体化技术及链路特性分析[J].激光与光电子学进展,2015,52(6):87-93.ZHAO X,NIU J P,LIU Y Q,et al.Laser communication/ranging integrated technology and link characteristics in navigation satellite system[J].Laser & Optoelectronics Progress,2015,52(6):87-93.
[18]GREIN E M,KERMAN A J,DAULER E A,et al.An optical receiver for the lunar laser communication demonstration based on photoncounting superconducting nanowires[J].Proceeding of SPIE,2015(9492):949208.
[19]黄波,胡修林.北斗2导航卫星星间测距与时间同步技术[J].宇航学报,2011,32(6):1271-1275.HUANG B,HU X L.Inter-satellite ranging and time synchronization technique for BD2[J].Journal of Astronautics,2011,32(6):1271-1275.
[20]吴伟仁,王琼,唐玉华,等.“嫦娥4号”月球背面软着陆任务设计[J].深空探测学报,2017,4(2):111-117.WU W R,WANG Q,TANG Y H,et al.Design of Chang’E-4 lunar farside soft-landing mission[J].Journal of Deep Space Exploration,2017,4(2):111-117.
[21]高珊,周文艳,梁伟光,等.地月拉格朗日L2点中继星轨道分析与设计[J].深空探测学报,2017,4(2):122-129.GAO S,ZHOU W Y,LIANG W G,et al.Trajectory analysis and design for relay satellite using Lagrange L2 point of Earth-Moon system[J].Journal of Deep Space Exploration,2017,4(2):122-129.
[22]熊凯,魏春岭,刘良栋.基于星间距离测量的高精度自主导航[J].空间控制技术与应用,2014,40(6):16-20.XIONG K,WEI C L,LIU L D.High-accuracy autonomous navigation based on inter-satellite range measurement[J].Aerospace Control and Application,2014,40(6):16-20.
猜你喜欢
探测与控制学报(2024年1期)2024-03-11 11:11:24
作文大王·笑话大王(2023年8期)2023-07-17 04:09:28
组合机床与自动化加工技术(2021年11期)2021-11-29 10:46:58
空间科学学报(2020年3期)2020-07-24 09:23:28
测控技术(2018年6期)2018-11-25 09:50:24
通信电源技术(2018年5期)2018-08-23 01:16:04
声学与电子工程(2018年1期)2018-04-27 02:46:43
制导与引信(2017年3期)2017-11-02 05:17:00
测绘科学与工程(2017年4期)2017-05-25 01:48:16
应用光学(2014年5期)2014-11-08 06:59:04