
智慧校园场景中智能引体向上训练器的设计
2018-06-29 06:40张新风吴一凡郭宇歌胡钦宇戴德琰郭献章
物理实验 2018年6期
张新风,吴一凡,郭宇歌,胡钦宇,戴德琰,郭献章
(1.首都师范大学 初等教育学院,北京 100037;2.东北大学秦皇岛分校 计算机与通信工程学院,河北 秦皇岛 066004;3.吉林大学 外国语学院,吉林 长春 130012)
互联网+与人工智能将引领社会生活的未来,做为新技术的发源地与孵化园,大学校园生活中的新技术应用不但能够更好地服务于师生的日常生活,还能够激发师生创新热情和创新活力,为以创新为第一源动力的中国特色新时期,增添一抹校园色彩.
在传统的体育场地和体育设施上,安装传感器、单片机、发射器、接收器,并通过无线数据传输到学校的数据中心,利用专用软件与互联网的大数据,进行处理与分析,再把处理结果反馈给训练者,并对其运动进行科学的指导. 以这种模式进行的创新,展现出师生共同的创新成果,如:专门针对跑步研发的督导系统,有效避免了人工点名带来的时间浪费与作弊等问题[1];专门针对仰卧起坐研发的设备,具备自动读数、报数,并根据不同训练者的不同时段,设定不同的仰角与训练强度[2]. 同时这些设备都有通讯模块,可以把数据传入学校的数据处理中心,以专用软件与互联网的大数据分析为支撑,对个人提供专业化、个性化的指导(反馈到使用者的手机APP),也为学校的体育管理机构提供具体、翔实、实时的数据分析.
本文以该系列成果中的智能引体向上器为例,说明该创意来源与模式形成过程.
1 使用流程与技术功能实现
1.1 外观造型及使用方式
智能引体向上训练器如图1所示,通过安全护具将机器和人连起来,机器可提供额外牵引力. 在进行引体向上训练时,通过安全护具将牵引力引导至人的身上,减少人引体向上时所需的力,从而使使用者更容易完成引体向上. 使用时,使用者先戴上安全护具,然后打开手机蓝牙,与训练器进行蓝牙配对,打开APP开始计数按钮,打开总开关手握单杠,开始做引体向上. 若在等待时间t1(t1在出厂时已设定好)内,对射式光电传感器未检测到人的头部,则说明训练者的臂力大小不够,引体向上动作并不能完成,此时蓄水桶的水泵开始工作,对蓄水桶进行抽水,软管将水送入上水桶. 上水桶中的水量逐步增加,人所需的力量逐步减少,直到人的头部达到光电传感器所能探测外,水泵暂停注水,称重模块得到重量后将压力信息传给单片机,单片机记1次成功次数,并通过蓝牙将这些数据发送给手机,第1次引体向上成功. 若需要提高该设备的稳定性,也可后期在此设备加入滑槽等装置,将上水桶放入滑槽,使训练者在训练过程中水桶能更加稳定地提供配重力.
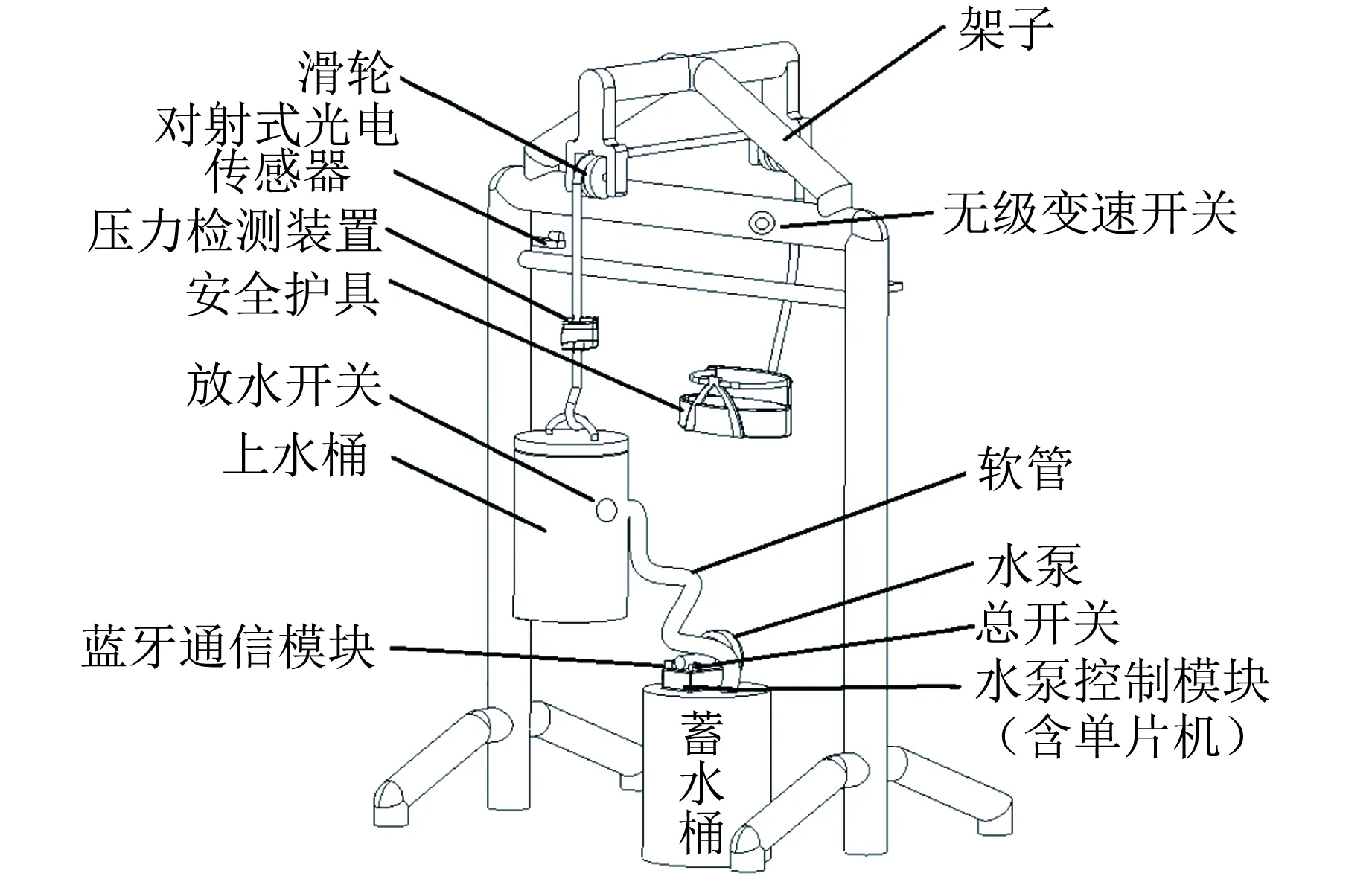
图1 外观及硬件设备
然而,当训练者完成第1次引体向上之后,训练者的体力会有所下降,即随着完成引体向上次数的增加,人的臂力F会逐渐减小,所以需要增加水桶提供的配重力T作为补偿. 基于以上要求,有2种技术方案可供选择.
方案A:设定t2为1次抽水周期时长,t1仍为抽水周期间的等待时长,在等待期间水泵不抽水(t1和t2出厂时已设定好). 抽水速度可由无级变速开关调节. 训练者在继续做第n(n≥2)个引体向上时,定义智能引体向上训练器有以下循环工作过程:先经历等待时间t1,然后水泵以流速u抽水,抽水时长为t2,t1和t2交替经历,如此循环下去. 在这个循环工作过程中,只要光电传感器在任何时刻检测到人的头部,水泵就暂停抽水,该次引体向上循环工作过程终止,称重模块得到重量后将压力信息传给单片机,单片机记1次成功次数,并通过蓝牙将这些数据发送给手机,之后进行第n+1引体向上训练,第n+1次训练仍遵循上述循环工作过程.
方案B:设定t1仍为抽水周期间的等待时长(t1在出厂时已设定好)),在等待期间水泵不抽水. 抽水速度可由无级变速开关调节. 从训练者做第n(n≥2)个引体向上以后,在经历等待时间t1之后光电传感器仍未检测到人的头部,则水泵开使不断注水,当水的流速匹配人的臂力衰减速度时,人就可以最大限度地进行引体向上. 光电传感器每探测到一次头部时,说明训练者成功完成1次引体向上,称重模块测得此刻的上水桶质量,将压力信息传给单片机,单片机记1次成功次数,并通过蓝牙将这些数据发送给手机.
经过对比后发现:虽然在理论理解上方案B比方案A更简单容易,但方案B精度较低,流速匹配训练者臂力的衰减速度较难实现,很有可能出现上水桶的水加入过多导致无法起到训练效果的问题,方案A这种间断性抽水方式使用起来更为灵活,也更符合实际生活情况,为此具体讨论方案A的实现过程.
1.2 主要硬件模块介绍
1.2.1 单片机STC89C52RC
单片机是整个器械系统的核心,选STC89C52RC 型号单片机,其工作电压为3.3~5.5 V,工作频率为[5]0~40 MHz,具有启动转换、数据处理和计数等多种功能.
1.2.2 对射式光电传感器模块
该模块中传感器的发射器和接收器是分开放置,发射器发射红外光后会与接收器形成通路,当训练者通过对射式光电传感器时,光路就会被训练者头部所阻挡,这时接收器就会及时的反应并输出开关控制信号[6]. 选用型号为E3F-5DN1的型号光电传感器,其抗干扰能力强,造价成本低,最大检测距离可达5 m,满足器械要求.
1.2.3 水泵控制模块
控制模块元件包括单片机、继电器、三极管、红色发光二极管、绿色发光二极管、二极管IN4148、100 Ω电阻R1和100 Ω电阻R2. 串联单片机的所需I/O引脚与电阻R1串联接到三极管Q1的基极B. 2种二极管分别代表2种不同的训练状态,红色二极管点亮时代表“引体向上未成功状态”,绿色二极管点亮时代表“引体向上成功训练状态”. 红色发光二极管和电阻R2串联后连接到+5 V电源VCC上. 同理绿色发光二极管和电阻R3串联后连接到电源VCC. 继电器线圈的一端接到三极管的发射极E,另一端接到电源VCC上. 二极管 IN4148联在继电器线圈两端,用于吸收释放继电器线圈断电时产生的反向电动势,防止反向电势击穿三极管及干扰其他电路. 当训练者并未成功完成引体向上,需要一定的配重力,I/O引脚输出高电平时,三极管饱和导通,继电器线圈两端电压为电源电压,继电器吸合,继电器的常开触点闭合,水泵开始工作,此时红色三极管点亮只是未成功状态. 反之,当配重力足以使训练者完成引体向上时,I/O引脚输出低电平,三极管处于截止状态,继电器线圈两端由于没有电位差而释放衔铁,继电器的常开触点释放,水泵停止工作[7]. 系统的水泵可以采用目前市面上常见的220 V供电水泵,该水泵出水量适中,满足引体向上时对配重力精准度的要求,模块电路见图2.

图2 水泵控制模块电路图
1.2.4 压力检测模块
压力检测模块由压力传感器、放大电路、A/D转换器组成,与STC89C52RC 型号单片机相连接,构成完整的压力检测系统. 压力传感器选用S型梁体结构称重传感器,一端与绳子相连,另一端与上水桶相连,该S型梁体结构称重传感器有配套的转换模块,便于单片机采集数据.
该模块的工作原理是当总开关被打开后,在训练者成功完成引体向上动作时,上水桶到达地面,压力传感器感知上水桶重量,产生力学量,接着将力学量转换成具有特定函数关系的电信号,经放大电路、A/D 转换电路后送单片机进行处理[9-10]. 为了延长压力传感装置的寿命,可以在其外围加上保护套. 由于水桶重量已知,当前水桶质量减去初始质量即为配重. 配重信息被单片机暂存,并通过蓝牙通信传递给训练者手机. 检测流程图如图3所示.

图3 压力检测流程图
1.2.5 蓝牙通信模块
当今4种主流的短距离无线数据网络通信技术分别是近距离无线传输(NFC)、ZigBee、无线局域网(WiFi)、蓝牙(Bluetooth). 与其他三者比较,蓝牙4.0拥有耗电量较少、传输信息量大、模块体积较小等优点[11]. 该器械的通信模块核心控制器为TI公司的CC2540蓝牙芯片. 该芯片使用了最新的BLE4.0技术. 它包含了8051内核的RF收发器,可编程闪存,8 kB RAM,以及其他功能十分丰富的配套特征及外设等. 训练者使用该器械时,打开手机蓝牙,与蓝牙模块连接蓝牙,以串口的方式与单片机进行信息传递[12]. 流程示意图如图4所示,箭头方向代表数据传输方向. 在光电传感器和压力传感器正常工作时,可以将引体向上的成功数和配重量实时传递给手机设备,完成人机互动.

图4 蓝牙数据传输
1.3 软件设计

(a)从开始到第1个引体向上成功

(b)从第2个引体向上到结束图5 软件设计流程
图5所示的流程图说明在使用者无法依靠自己力量完成完整引体向上动作时,单片机通过继电器控制水泵以辅助使用者完成动作的过程. 程序主要有初始化模块、光电检测模块、水泵控制模块、配重力测量模块和蓝牙通信模块. 训练者打开总开关,系统上电,单片机复位,程序运行到主函数开始处进行各模块初始化,在训练者完成第1个引体向上之后,程序在while语句的死循环中一直运行,直到训练者关闭总开关.
2 “互联网+”功能实现
本智能引体向上训练器融合了“互联网+”[13]概念,既有相关APP可供训练者了解训练信息,也有大数据服务平台进行相关的数据挖掘. 该训练器可以与不同训练者进行“一对一”的相互交流,实现智能化效果.
2.1 APP主要功能和界面设计
2.1.1 登录界面
登录界面时,训练者需要输入登录账号和密码,供服务端进行登录验证. 训练者在登录后可以按照操作填写个人数据,包括身高、体重、年龄、职业等信息. 这些信息被储存到云端训练者信息数据库,供相关人员使用.
2.1.2 主界面
手机APP系统的实现采用WeX5作为开发工具,WeX5开发的手机应用移植性好,也可以调用本地的硬件资源,用户体验优良[14]. 在APP主界面(如图6所示),训练者可以看到本次训练的引体向上次数、负载配重量及训练时间等信息. 训练者点击左下方的“周月年”还可以查看训练状况,训练状况以曲线图的形式展现,并在当前界面给出训练评估和建议. 手机与训练器之间保持蓝牙连接,数据互相同步并被储存到云端,避免训练者数据丢失.

图6 APP界面
2.2 服务平台的设计
本引体向上训练器融合大数据理念,训练者进行用户登录后点击云端保存按键,数据就会通过互联网上传至学校的数据中心,并在学校的数据中心储存[15]. 这些数据被汇总后,被传递到后台对数据进行复杂的识别、分析和处理. 大数据服务平台能够预测训练者者的身体健康状况的趋势,并通过APP给出有价值的指导意见. 此外,系统为商家赞助提供广告与数据服务,可以通过手机上的APP应用,为赞助商提供精准广告服务和大数据的支持. 如图7所示,空心箭头代表训练时长,引体向上次数和配重力等信息的传输方向,实心箭头代表训练分析与指导信息的传输方向. 并通过无线数据传输到学校的数据中心,利用专用软件与互联网的大数据,进行处理与分析,再把处理结果反馈给训练者,并对其运动进行科学的指导,完成教学督导任务.

图7 服务平台模型
3 设备测试及结果分析
3.1 研究对象
实验选取大学二年级非体育专业本科男生50人,平均年龄19.5岁,其中有38人引体向上成绩未达到《国家学生体质健康标准(2014年修订)》(以下简称标准).
3.2 实验指标
本实验测试指标是体重、上臂放松围和紧张围、胸围和引体向上次数.
3.3 实验分组
根据标准测试50名大学生的引体向上成绩.
完成次数≥7的18名学生为A组,平均完成次数7.4个;完成次数<7的32名学生为B组,平均完成次数3.9. A组平均随机分成2个小组,由A1和A2组成,B组平均随机分成2个小组,由B1和B2组成,训练周期为1个月,在课余时抽出时间进行训练,每周训练2次,每次训练4组,每组间隔5 min,每组限定时间为30 s.
A1组每次完成4组训练,每组一开始就使用引体向上训练器使之达到极限次数. A2组只完成4组极限次数训练,不增加配重力训练. B1组每次完成4组训练,每组训练先不开启引体向上训练器,而是在达到极限次数后马上开启,直到到达训练极限次数. B2组一直开启引体向上训练器,始终在配重力的协助下完成4组训练.
3.4 实验结果
3.4.1 A组引体向上训练前后成绩对比
依据标准,对A组训练前后进行数据对比分析,大二学生引体向上10次以上达标准要求,A 组参训前平均次数7.4个,有11人已达标及格,7人未合格. 训练后平均完成11.0个,达标率100%,且上臂围及胸围均有显著性增加,实验证明训练使肌肉体积和力量均有增加.

表1 A组训练前后各指标平均值的变化
注: (1)P<0.01,(2)P< 0.05.

表2 A1和A2组训练前后各指标平均值的变化
注: (1)P<0.01,(2)P< 0.05.
3.4.2 B组引体向上训练前后成绩对比
B 组训练前平均成绩3.9个,全部没有达到及格标准,训练后测试成绩平均7.9个,20人达标,12人仍未达标及格. 从中可以看出,使用该引体向上训练器可以使使用者训练次数达到明显提升. 训练者上臂紧张围度和放松围有所增加,但无显著性增加,胸围有显著性增加.

表3 B组训练前后各指标平均值的变化
注: (1)P<0.01,(2)P< 0.05.

表4 B1和B2组训练前后各指标平均值的变化
注: (1)P<0.01,(2)P< 0.05.
4 结束语
本文以智慧校园中的运动辅助及督导成果中的智能引体向上器为实例,具体阐述了其软硬件实现过程以及实验结果. 使用该引体向上训练器后,训练者的训练效果有了明显提升. 训练者使用手机APP也可以得到专业化、个性化的指导. 采集的训练者数据也为学校的体育管理机构提供了有用的数据分析基础. 从高校教育层面来讲,智慧校园中的运动辅助及督导应用实例相较传统引体向上训练器的先进之处在于结合当下“互联网+”的趋势,打造从训练者APP到云端数据存储的一站式服务,并给予一定的运动指导意见. 运动辅助及督导与“互联网+”的结合不仅是校园体育运动信息化建设的新阶段,更是新形势下校园体育运动建设的新变革.
参考文献:
[1] 郭宇歌,郭彤,郭岩岩. 一种引体向上督导方法、装置及具有督导功能的单杠. 中国:CN106730570A[P]. 2017-05-31.
[2] 郭宇歌,郭彤,郭岩岩. 一种跑步督导方法和系统. 中国:CN106504360A[P]. 2017-03-15.
[3] 雷永利,张霈,郭子明. 消防官兵单杠引体向上正手宽握与中握动作的肌电特征比较[J]. 北京体育大学学报,2012,35(2):59-61,66.
[4] 赵东胜,艾英伟,黄辉. 不同训练方法对引体向上成绩的影响[J]. 军事体育进修学院学报,2010,29(2):75-77.
[5] 冯利军,陶大锦,冉康康. 基于89C52的腕关节康复评估系统设计[J]. 电子器件,2013,36(1):124-127.
[6] 周钦河. 浅谈光电传感器在自动控制中的应用[J]. 科技创新与应用,2013(28):24.
[7] 何伟宏,郑首易,毛锦庚,等. 基于单片机的智能浇花系统设计与实现[J]. 电子制作,2016(2):20-21.
[8] 滕春阳,魏雨辰,戴喜良. 电阻应变式传感器在自动浇花器中的应用[J]. 硅谷,2011(7):137.
[9] 李秉荣,刘夫云,程雄,等. 自动称重系统的设计与实现[J]. 电子器件,2010,33(2):245-248.
[10] 苏凤,王选诚,陈政,等. 基于单片机的数字式称重仪设计[J]. 传感器世界,2015,21(12):21-25.
[11] 郑劲松,黄振奋. 基于蓝牙4.0的校园可穿戴智能终端设计[J]. 宁德师范学院学报(自然科学版),2017,29(1):83-89.
[12] 杨潞霞. 基于STC89C52RC的智能浇花系统设计与实现[J]. 山西电子技术,2017(6):46-49.
[13] 汪端德. 大学生在“互联网+”时代的创新创业研究[D]. 武汉:华中科技大学,2016.
[14] 马宁生,吕军,方恺. 大数据背景下的大学物理实验教学改革[J]. 物理实验,2016,36(12):26-30,34.
[15] 郭平生,柴志方,崔璐,等. 手机APP系统在大学物理实验教学中的应用[J]. 物理实验,2016,36(11):28-31.
猜你喜欢
防爆电机(2022年4期)2022-08-17
工业设计(2022年7期)2022-08-12
机械设计与制造(2022年5期)2022-05-19
水泵技术(2021年5期)2021-12-31
昆钢科技(2021年1期)2021-04-13
装备制造技术(2020年1期)2020-12-25
商情(2019年37期)2019-08-21
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
汽车与新动力(2012年1期)2012-03-25
