一种非接触式多种液体的精确量取与混合系统
2018-06-28 02:55陈旻哲刘守印
计算机与现代化 2018年6期
陈旻哲,熊 诚,刘守印
(华中师范大学物理科学与技术学院,湖北 武汉 430079)
0 引 言
随着人民生活水平的提高,客户对中高端产品需求旺盛,整体市场消费水平明显提高。在这一大环境下,当大家忙于拼产品概念、拼促销时,一种全新的人性化销售服务理念——定制营销,无疑将在满足个性需求、丰富品牌文化内涵、促进销售增长等方面,发挥积极的作用。
消费新变局的背后,有着深刻的工业基础。相比于流水线、标准化的传统工业模式,基于互联网技术的第三次工业革命,正开启更加个性化、小型化的生产和商业模式[1]。定制营销也逐渐被越来越多的美容化妆品商家、食品商家提上议程。越来越多的商铺推出了现场私人定制化妆品、饮品的服务,并获得了一定的成功[2]。但是,目前这种服务大多数依靠人工手动调配化妆品或饮品。这种方式存在4点缺陷:1)需要经过培训的专业调配员,浪费人力物力;2)调配出的混合液体精度低、损耗大、质量低;3)调配时间长,考验用户耐心;4)缺少信息化数据管理。
针对以上问题,本文创新设计了一套基于2种新型装置的液体调配系统。该系统主要服务于家庭或商家,帮助他们即时自动化定制混合液体(如精油、饮料、调味料等),解决了传统手工调配存在的诸多问题,使之具有高度自动化、原液损耗低、调配精度高、调配速度快、系统成本低等优势。
1 系统设计
本文设计并实现了一套液体调配系统,其主要技术包括嵌入式技术、计算机技术和流体控制技术。
系统的整体架构如图1所示。系统共由底层设备、前端客户端和后台数据中心3个部分组成。底层设备为本系统的核心——液体调配仪(简称调配仪)。前端客户端分为PC前端和Android前端。其中,PC前端通过USB2.0与调配仪通信,实现对调配仪的控制以及数据交互等功能;Android前端通过蓝牙4.0与调配仪通信,实现的功能与PC前端基本一致。前端客户端还可以通过公网(如4G、GPRS、以太网等)与数据中心的服务器交互,从而实现数据存储、信息推送和软件更新等功能。
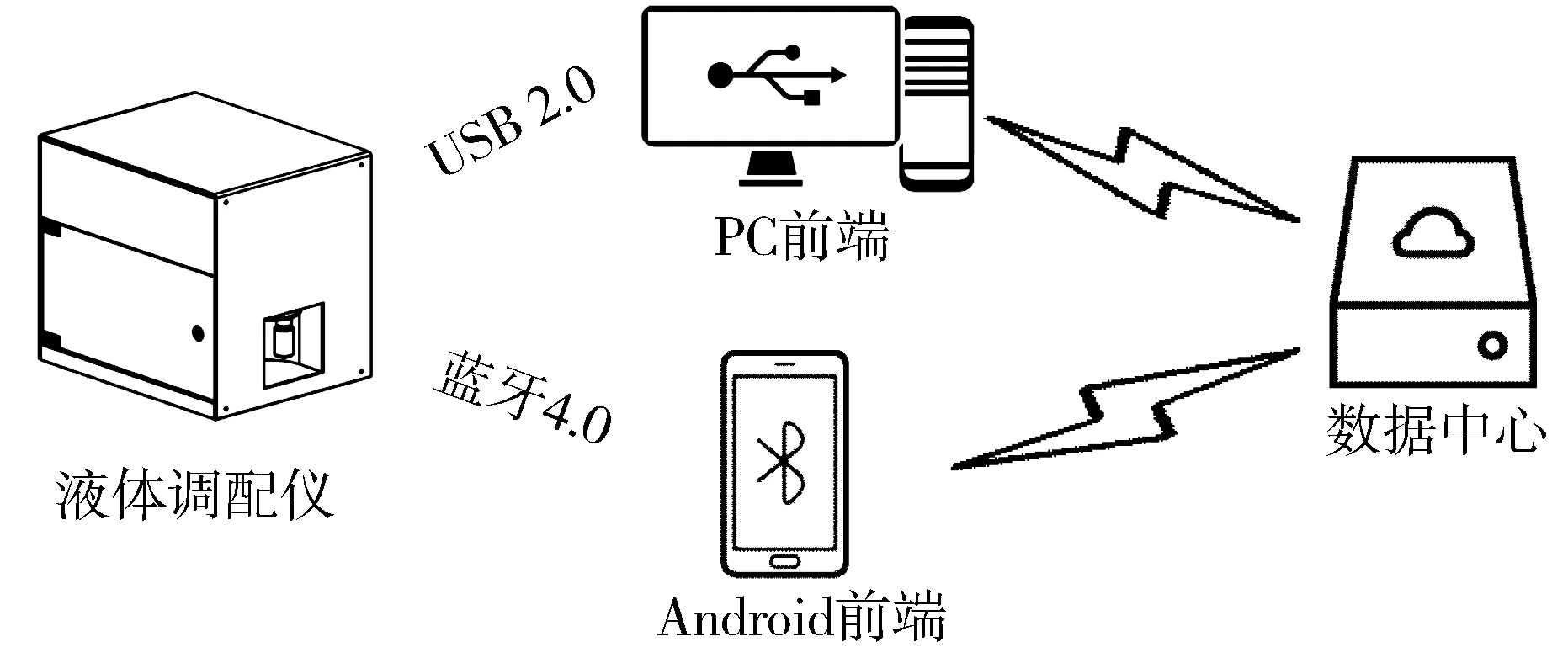
图1 系统架构图
2 底层设备设计
本系统的底层设备为调配仪。调配仪是一款嵌入式智能硬件,其基本功能包括液体调配、数据存储、前端交互等。下面将详细介绍调配仪的机械结构及工作原理、底层硬件设计和底层软件设计。
2.1 调配仪的机械结构及工作原理
调配仪的机械结构共分为亚克力外壳、金属主架和旋转滴壶3个部分,如图2所示。亚克力外壳用于包装调配仪,主要起美观作用。金属主架是调配仪的主体部分,用于安装亚克力外壳、主控板、旋转滴壶以及多个原液瓶、蠕动泵和电机。旋转滴壶是实现液体调配功能的核心,上面安装了红外信号板、一个驱动机构和一个收集瓶。
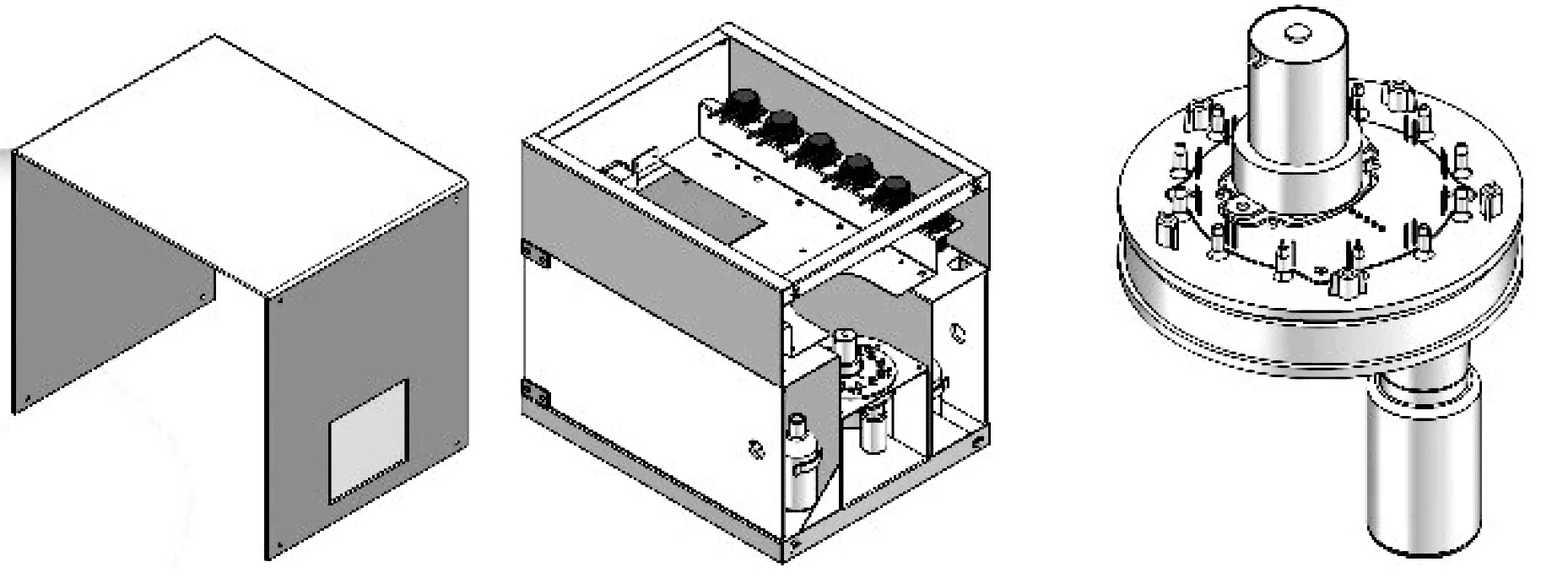
(a) 亚克力外壳 (b) 金属主架 (c) 旋转滴壶图2 调配仪的基本组成图
调配仪的基础功能——液体调配分为液体的精确量取和液体的无损耗混合2个步骤:
1)液体的非接触式精确量取。
本文提出一种非接触式精确量取微量液体装置(简称为取液装置)。该装置主要由蠕动泵、电机、液滴检测装置和主控板组成,其整体结构如图3所示。输液管穿插在蠕动泵内,该输液管的入口插入在原液瓶的液面下。主控板与电机电连接,通过控制电机工作进而控制蠕动泵挤压输液管。输液管的出口连接液滴检测装置。液滴检测装置与主控板电连接,并将内部红外接收管检测到的红外信号转换为电信号反馈至主控板。主控板利用液滴检测算法将反馈信号换算成输出液体体积。该装置成本低,结构简单,安装方便,能实现高精度量取微量液体,并且全程无接触、无污染。
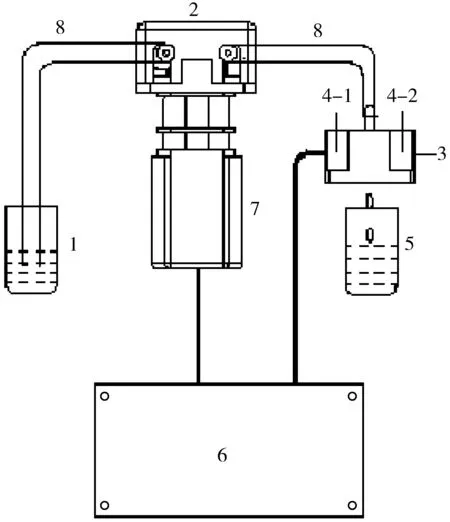
1 原液瓶;2 蠕动泵;3 液滴检测装置;4-1 红外接收管;4-2 红外发射管;5 收集瓶;6 主控板;7 电机;8 输液管
图3 一种非接触式精确量取微量液体装置结构图
2)液体的无损耗混合。
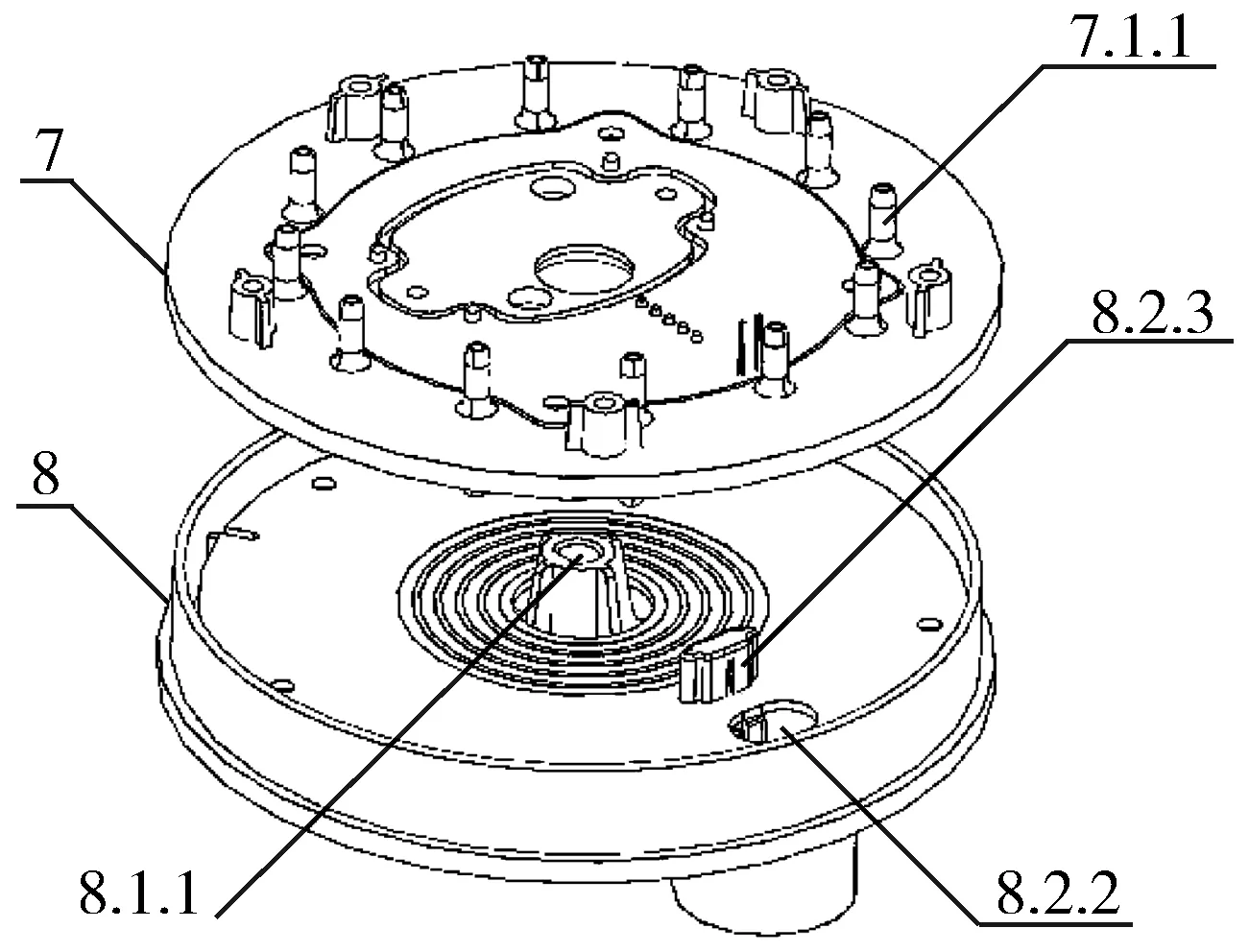
在取液装置的基础上,本文提出一种多通道微量液体精确混合装置。装置主要由底盘、转盘、驱动转盘旋转的驱动机构、收集瓶组成的旋转滴壶、主控板和多个取液装置组成。其整体结构如图4(a)所示。底盘位于转盘上面,转盘以其垂直中轴线为中心旋转。底盘上设有多个液体混合入口。每个入口分别与其对应的取液装置的输液管输出末端连接。转盘上设有一个液体混合出口。出口处设有一对液滴检测红外对管;出口下方设有混合液体收集瓶。转盘上设有一个定位红外发射管,底盘上设有多个定位红外接收管。主控板控制驱动机构驱动转盘旋转,同时能够控制取液装置输送原液瓶内的待混合液体。液滴检测红外对管和定位红外对管与主控板电连接。
当用户在前端输入配方,即输入各个通道的原液所占的混合比例后,调配仪通过USB或蓝牙收到命令,开始工作。首先,主控板控制驱动机构使旋转滴壶上的转盘旋转,直至转盘上的液体混合出口和配方中第一个比例大于0的原液对应的液体混合入口在同一垂直线上。之后,主控板驱动对应取液装置的蠕动泵工作,进而从原液瓶中抽取原液至液体混合入口处滴下。在原液滴下至收集瓶的过程中,液体混合出口处的红外对管不断向主控板反馈电信号进行液滴计数。当该通道的原液输出量达到由配方换算得到的原液体积时,主控板立刻停止驱动蠕动泵的电机并回转一小段时间,然后控制驱动机构将转盘旋转至下一原液对应的液体混合入口,直至本次调配完成。装置以一种新型结构实现了非接触式多通道微量液体精确混合。这种混合方式相较于传统的混合装置,最后的液体混合精度完全依赖于液体量取精度,在混合过程中既不会降低精度也不会损耗液体。
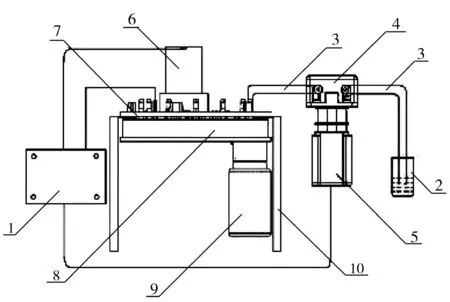
(a) 装置整体结构图
(b) 底盘和转盘结构图
1 主控板;2 原液瓶;3 输液管;4 蠕动泵;5 电机;6驱动机构;7 底盘;7.1.1 液体混合入口;8 转盘;8.1.1 电机固定口;8.2.2 液体混合出口;8.2.3 定位红外发射管;9 收集瓶;10 支架
图4 一种多通道微量液体精确混合装置结构图
2.2 底层硬件电路设计

图5 硬件电路设计框图
调配仪中的底层硬件电路共分为2个部分,即安装在金属主架上的主控板和安装在旋转滴壶上的红外信号板。系统硬件电路设计如图5所示。
1)主控板。
对于本系统的核心控制器来说,其需要以一个较低的成本支持USB及其它各种通信,以保持与上位机及其他模块间的交互;此外,根据用户需求的不同,调配仪需要从多个原液瓶中取液,这就要求控制器能够拥有多个IO口去控制每一个原液瓶对应的蠕动泵,以及多路模数转换器(Analog-to-Digital,A/D)采样通道去采集旋转滴壶底盘上的多个定位红外接收管和转盘上的一个液滴检测红外接收管的电信号,从而实现液体的精确量取与混合。因此,本系统的核心控制器选用Microchip公司的PIC18F65J50单片机。PIC18F65J50是一款采用纳瓦技术的64引脚高性能1MB闪存USB单片机。PIC18F65J50除了拥有PIC18F系列单片机的固有优点(具备出色的计算性能和丰富的功能)之外,还拥有一个兼容USB2.0的串行接口引擎、12路通道的10 bit A/D、2个增强型USART等[3-5]。对于本系统来说,PIC18F65J50无疑是市场上性价比最高的一项选择。
2)红外信号板。
红外信号板共有2块,分别安装在旋转滴壶底盘和转盘上。2块红外信号板通过底盘红外信号板上的金属弹针和转盘红外信号板上的环形铜片保持底盘旋转时的电连接。2块红外信号板上装有若干红外发射管和红外接收管。旋转滴壶上转盘旋转位置的确定以及液滴的检测皆通过红外光电传感技术实现。
红外对管正常工作时,发射管发射红外光,红外光直射接收管,接收管将接到的光强转化为相应大小的电流。若红外光受到干扰或者遮挡、偏移时,光强损失大,接收管转换的电流较弱[6]。在这一原理的基础上,设计如图6所示的电路,将电流变化转化为电压变化,通过主控制器的A/D采样口对该电压进行采样,从而将红外对管检测到的光强信息转化为电压信号波形。
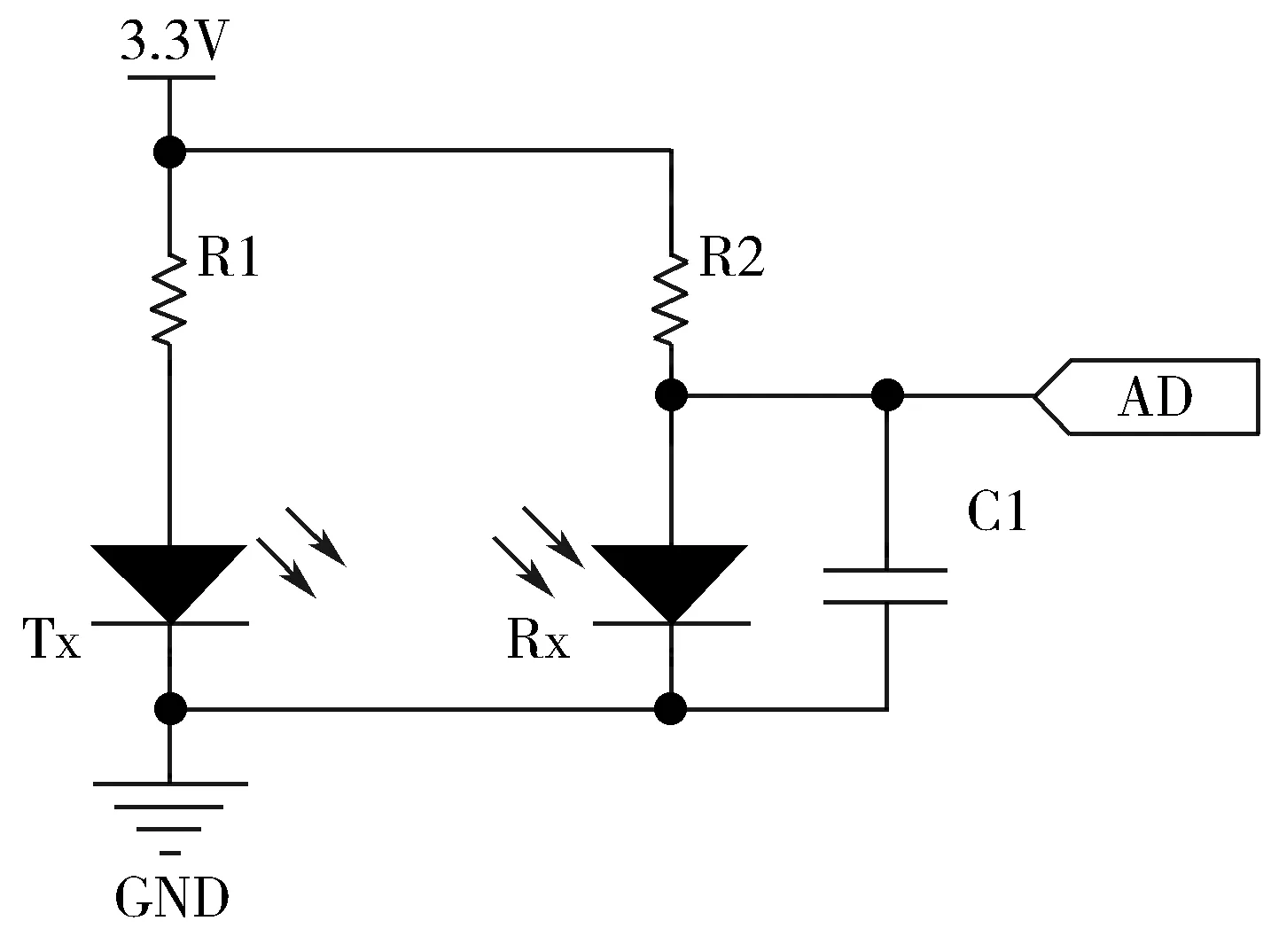
图6 红外对管电路原理图
对定位红外对管来说,当且仅当某一液体混合入口和液体混合出口处于同一垂直线上时,该液体混合入口对应的定位红外接收管才会收到定位红外发射管的直射红外信号,产生一个相对较强的电流;其他时候,定位红外接收管则一直处于几乎接收不到任何红外信号的状态,电流极弱。由此,主控板通过同时判断多个通道的定位红外接收管的电流反馈信号来控制底盘的旋转角度。
对液滴检测红外对管来说,在液滴的形状大致相同的情况下,当有液滴从对管间滴下时,红外信号会发生特定的光强变化,相应地主控板AD采样到特定的电压信号波形。主控板利用液滴检测算法计算输出液体的总体积。
2.3 底层软件设计
底层软件实现的主要功能包括与前端软件的通信交互以及对调配仪的控制。在底层软件主程序的基础上,涉及的主要算法为液滴检测算法。
1)底层软件工作流程。
底层软件的主要工作流程如图7所示。
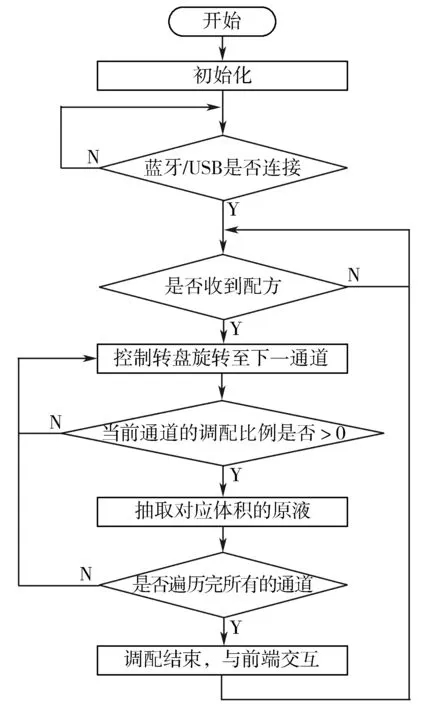
图7 底层软件工作流程图
2)液滴检测算法。
当外界环境相对稳定时,所输原液在液体混合入口处形成的液滴的大小只与所输液体本身的表面张力有关,与滴管的直径和滴流速度无关。因此,大致可以认为液体混合入口滴下的每一滴液滴的体积相同[7]。本文以纯净水为例,在口径为1.5 mm、蠕动泵电机空载转速为20 r/s的情况下,多次测量滴下1000滴液滴的液体总体积,求得1000滴液滴的总体积平均为45.01 ml,由此计算出每一滴液滴的体积平均为0.045 ml。因此,只要调配仪能够检测并记录当前通道已经抽取的总液滴数N,即可通过公式(1)算得当前已抽取的总液体体积V:
V=0.045×N
(1)
在本系统中,调配仪通过采集转盘上的液滴检测红外对管反馈的电压信号,再利用液滴检测算法来计算N的值。传统的利用红外光电传感技术的液滴检测方案大多在硬件上对信号进行了复杂的处理,如将发射信号调制、将转换得到的电压信号放大、整形,最后输出标准的脉冲信号供给单片机检测。每当单片机检测到一个脉冲,即为检测到一滴液滴[8-10]。但是这种方案对连续落下的液滴的状态要求严格,一旦液滴出现不规则的形状,或者出现气泡炸裂,这种方案将极易带来误判。因此在这种方案中对蠕动泵的要求非常严格,甚至需要使用步进电机驱动蠕动泵。但这样一来方案的成本和体积会变得难以控制。除此之外,也有许多研究使用其他传感器来进行液滴检测,如电容、摄像头、光纤等[11-14]。这些方案通过微控制器提取这些更复杂的传感器的反馈信号,并进行算法检测,从而实现超高精度的液滴检测。但这些方案对传感器和微控制器的要求均较高,从而造成成本的提高。
因此,本文综合考虑成本、体积和精度,设计了一种红外液滴检测的改进方案。方案采用普通的直流电机来驱动蠕动泵工作,进而通过蠕动泵来抽取原液。待蠕动泵的输液管输出液滴时,输液管输出端的红外接收电路将变化的红外信号转换为电压信号后不做任何硬件信号处理,直接通过主控板的A/D采样口进行电压信号的采集,最后通过软件中的液滴检测算法对采样波形进行检测,从而判断是否滴下一滴液滴。这种方案相较于传统的液滴检测方案具有成本低、体积小的优点,是一种在牺牲一定取液精度的情况下,性价比极高的一种方案。

图8 液滴电压信号波形
通过实验测得,当有一滴液滴落下时,PIC18F65J50单片机A/D采样得到的电压信号大致如图8所示。在对波形进行了均值滤波后,本系统的液滴检测算法主要运用了滑动时间窗口和滑动阈值法来进行液滴检测[15-16]。
3 前端设计
为了适应各种应用场景,调配仪除了能够通过USB和PC前端进行有线通信外,还能通过蓝牙4.0和Android前端进行无线通信。在系统内2种通信机制之间互锁,并且2种前端实现的基本功能大致相同。前端主要工作流程如图9所示。
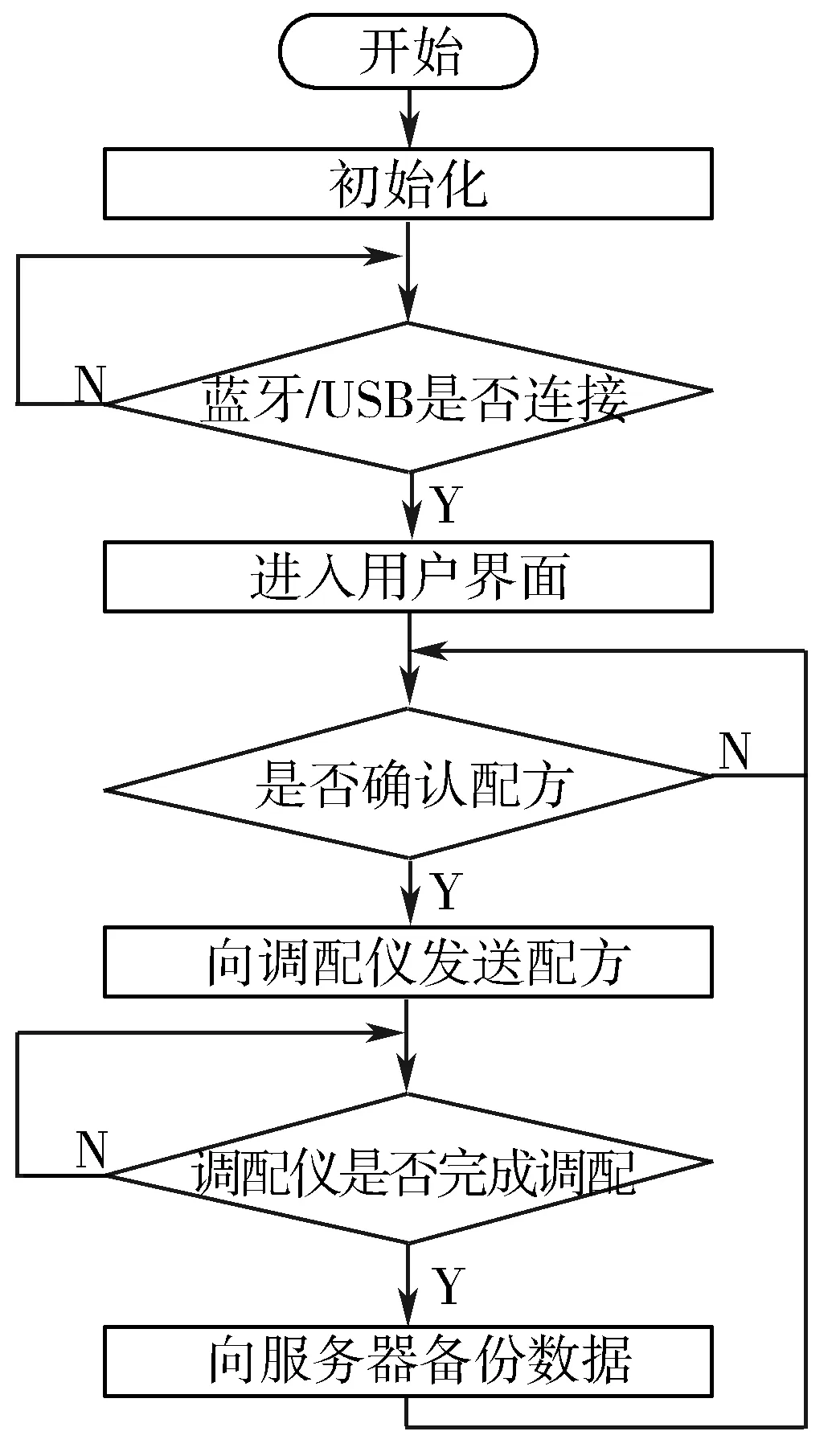
图9 前端工作流程图
同时,本系统还开发了相应的后台服务器,来进行数据存储、信息推送和软件更新。
4 系统分析
4.1 人机交互界面
本文设计的PC前端和Android前端的用户界面和功能界面如图10所示。整个前端功能完整、运行流畅,在与用户进行充分交互的前提下,可按设定要求控制调配仪工作。
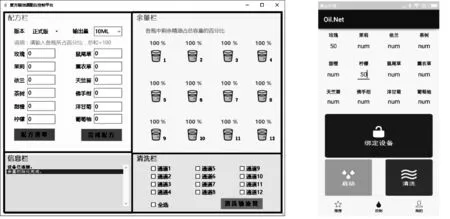
(a) PC前端 (b) Android前端图10 前端控制界面
4.2 调配仪液体量取精度分析
由于调配仪的设计原理是以液滴滴数来计算液体体积,因此这里将0.045 ml作为一滴液滴的标准体积,在前端输入多种理论输出体积,在每种情况下通过10次实验测量了实际液滴滴数和实际输出液体体积的平均值。
表1 各液体输出体积下液滴滴数及液体体积误差

理论体积/ml理论滴数/滴平均实际体积/ml体积误差/%平均实际滴数/滴滴数误差/%51114.813.801100.90102229.752.502210.451533314.702.003300.903066729.601.336610.9050111149.550.9011040.63
由表1可见,滴数越多的情况下,最后输出的液体体积误差越小;而液滴滴数精度一直维持在一个较为稳定的精度(误差≤1.00%),能充分满足家用或商用液体调配的真实需求。
5 结束语
在如今这个资源丰足、产品选择多样甚至供过于求的社会状态下,消费者在精神层面上对有别于他人的个性倾向和自我意识的表达有了更高的追求[17]。特别是在化妆品、食品等消耗品行业内,“私人定制”已经成为一种发展趋势。这时,设计一款成熟的家用或商用的液体调配系统是十分有必要的。
本文针对上述市场需求设计了一款基于PIC18F系列单片机的液体调配系统。系统通过创新设计调配仪内的非接触式精确量取微量液体装置和多通道微量液体无损耗混合装置,配合相应的软、硬件设计,实现了对多种液体的个性化、精确、快速、无污染、无损耗、自动化调配。整个调配仪成本低、体积小、结构简单、外形美观,适用场景包括液态化妆品调配、饮品调配、调味料调配等。同时,本系统还配套开发了相应的前端和后台,让整个系统功能完整、可移植性强、扩展性高,具有广阔的市场前景。
参考文献:
[1] 海川. 新消费催生中国消费新变局[J]. 新经济导刊, 2017(z1):37-41.
[2] 陈曦. LotionSPA“定制”出来的化妆品专营店——专营店探索的成功案例[J]. 中国化妆品(行业), 2009(5):69-71.
[3] 钱淘. 基于PIC18F87J10电能表费控自动测试装置设计[D]. 洛阳:河南科技大学, 2015.
[4] 钱鹏,秦会斌. 基于PIC18F65K90的低功耗数字压力表设计[J]. 电子设计工程, 2015(6):142-145.
[5] Valderas M G, Garcia M P, Lopez C, et al. Extensive SEU impact analysis of a PIC microprocessor for selective hardening[J]. IEEE Transactions on Nuclear Science, 2010,57(4):1986-1991.
[6] 刘刚,凌强,徐俊,等. 基于STM32的输液监控系统设计与实现[J]. 微型机与应用, 2016(1):91-94.
[7] 王功利,刘景,蒋建华. 红外对管及其在测量滴流速度方面的应用[J]. 电子技术应用, 1996(5):31-33.
[8] Da Sliva M J, Hampel U.Capacitance wire-mesh sensor applied for the visualization of three-phase gas-liquid-liquid flows[J]. Flow Measurement and Instrumentation, 2013,34:113-117.
[9] 上官光华. 高精度输液监控系统[D]. 杭州:杭州电子科技大学, 2015.
[10] Thariyan K K, Verma S, Taneja S R, et al. Design and development of unique drop sensing unit for Infusion pump[J]. Journal of Scientific & Industrial Research, 2002,61(10):798-801.
[11] 朱月明,李霞,李斌. 新型液滴式雨量检测与计量装置实现[J]. 仪表技术, 2006(2):27-29.
[12] 马慧,高晶敏,杨鸿波. 一种基于边缘检测的液滴检测与体积计量方法[J]. 北京信息科技大学学报(自然科学版), 2013,28(4):69-73.
[13] Rosenkranz S, Tropea C, Zoubir A M. Detection of drops measured by the time shift technique for spray characterization[C]// IEEE International Conference on Acoustics, Speech and Signal Processing. 2016:2214-2218.
[14] 成顶. 光电液滴分析系统研究与应用[D]. 南京:南京信息工程大学, 2016.
[15] 李文峰,姚丙盟. 基于单三轴加速度传感器的人体活动状态识别[J]. 华中科技大学(自然科学版), 2016,44(4):58-62.
[16] 陈国良,张言哲,杨洲. 一种基于手机传感器自相关分析的计步器实现方法[J]. 中国惯性技术学报, 2014,22(6):794-798.
[17] 潘子林,崔淼. 互联网时代汽车个性化定制模式探索[J]. 包装工程, 2015(2):21-25.
猜你喜欢
控制与信息技术(2022年3期)2022-07-08
纺织科学研究(2021年1期)2021-12-03
节水灌溉(2021年2期)2021-02-25
纺织科学研究(2020年10期)2020-11-09
纺织报告(2020年4期)2020-08-14
物联网技术(2020年2期)2020-04-10
休闲读品·天下(2020年4期)2020-02-04
电子制作(2019年13期)2020-01-14
火控雷达技术(2012年3期)2012-06-05