
某型高速无人靶机飞行控制的设计与实现
2018-06-28 08:14:30,,,,
机械与电子 2018年6期
,,, ,
(南京航空航天大学自动化学院,江苏 南京 210016)
0 引言
无人机是一种不搭载人员,通过无线遥控或者程序可以实现自主飞行、远程控制的飞行器。随着科技的不断进步和社会需求的不断提高,无人机的性能也得到不断提升,进而广泛应用于军事和民事领域,如军用无人机用于信息对抗、通信中继等,民用无人机用于航拍摄影、环境监测等[1]。靶机属于军用无人机的一种,在军事演习或军用武器试射时,利用预设好的飞行路径或者处于遥控模式下,模拟敌方的飞行器或导弹,为地空、空空导弹或火炮提供动态目标与射击的机会[2]。高速无人靶机模仿高速移动目标,越来越满足当前军事演习或军用武器试射的需要。
在设计和使用高速靶机的过程中,对靶机飞行控制系统进行半物理仿真来实时模拟飞行过程,是一个不可或缺的试验步骤[3]。本次半物理仿真试验是利用仿真计算机接入飞控系统中的部分实物部件,实时模拟靶机从起飞到伞降整个飞行过程,不仅可以有效地验证系统的控制律,还能检测并排除在实际飞行中可能出现的故障。因此,靶机的飞行仿真试验在设计和使用高速靶机的过程中发挥着至关重要的作用。
1 飞行控制系统整体结构设计及各模块功能
无人靶机飞控系统实现了靶机从准备起飞到伞降着陆整个过程的飞行控制。在机载通信设备与地面通信设备成功匹配连接后,机载飞控系统把飞行状态参数,以及机载电源系统、发动机系统等工作状态参数,通过数据电台下传至地面测控站进行实时显示和监控,方便靶机操纵人员实时掌控机载设备和航电设备的各种信息和飞行状态,从而下达正确的靶机控制指令,保证靶机能够安全稳定飞行和顺利完成靶事任务[4]。
如图1所示,无人高速靶机的飞控系统主要由地面测控部分和机载飞控部分构成。机载飞控部分通过采集飞行状态参数如俯仰角、滚转角和航向角等来控制飞行姿态,从而保持靶机可以高速稳定飞行;地面测控部分主要完成对下传数据的解析处理,发送控制指令以及航迹规划等。其中,机载飞控部分是整个飞控系统的核心,下文中所提及的飞控系统均指的是机载飞行控制系统。
靶机飞控系统主要由控制器、机载传感器和执行机构(舵机)3部分组成。控制器包括中央处理单元、信号输出单元等,用以采集、处理信息;机载传感器主要有GPS、高度传感器和陀螺仪等。按照上述分析,从而得到靶机飞行控制系统整体结构设计如图2所示。

图2 靶机飞行控制系统整体结构设计
如图2所示,以TMS320F28335控制器为核心,搭载机载传感器,包括双GPS、角速率陀螺仪、垂直陀螺仪、磁航向陀螺仪、速度传感器和气压高度表等,与执行机构(舵机)共同构成靶机的飞行控制系统,从而实现无人靶机飞行姿态、航向和高度的稳定。
控制器是机载飞控系统的核心,因此必须具备强大的数据处理能力,同时也要有丰富的外围接口,本次设计的控制器采用TMS320F28335处理芯片。
TMS320F28335是TI公司推出的32位浮点DSP,具有150 MHz的高速处理能力,6个DMA通道,18路PWM输出,其中有12路16通道ADC,6路为TI特有的HRPWM,具有低成本、低功耗、外围接口丰富、高集成度和高性能等特点。因此,它具有强大的数字信号处理能力,广泛应用于处理速度和精度要求较高的领域[5]。
无人靶机的飞行控制系统的硬件采用模块化的设计方案,根据各模块在飞控系统中发挥的作用可以将飞控系统划分为以下几部分:主控制器、电源供电模块、电源变换模块、信号调理模块、开关量输入输出模块、数据通信模块、发动机控制模块和靶机组合导航模块等。其中,主控制器是飞控系统中最为核心的部分,控制器的好坏直接影响到靶机飞行性能的好坏[6]。
机载传感器模块可以实时采集当前靶机飞行状态信息,其性能好坏会影响到地面靶机操纵人员的指令决断。机载电台数据传输距离也将影响实验效果。本次高速无人靶机设计所选择的机载传感器和数字电台如下:陀螺仪采用L3G4200D三轴数字陀螺仪,用来测量并输出无人靶机的三维角速度;气压高度表选择BMP085数字式气压传感器,能应用在无人靶机飞控系统中,测得实时温度、气压;GPS可以实时输出靶机当前经度、纬度、海拔高度、飞行速度、高度变化率(升降率)和可接收到的卫星数等信息;采用GE MDS系列数字电台,可以实现无人靶机与地面测控台的双向长距离数据传递。
地面测控系统中综显计算机主要用来显示靶机下传状态信息和数据,而核心部分测控计算机为重要的人机交互界面[7]。有时,地面靶机操纵人员为提高效率,将综显计算机和测控计算机合二为一,在同一交互界面既可以实时地监控靶机飞行的状态,也可以通过操纵杆、油门杆、指令按钮对飞机发送控制指令进行人在回路控制。
2 飞行控制系统的控制规律及软件设计
2.1 飞行控制系统的控制规律
此次高速无人靶机飞行控制系统主要运用经典控制理论中的PID控制算法。飞控计算机接收到机载传感器下传的测量数据后,实时地进行信号处理、姿态解算并输出相应的控制信号。控制输出的信号,实时在线反馈到输入端,与预期的值相比较,不断纠正偏差,从而可以有效地在线修正无人靶机的飞行姿态,使其可以按照预定的飞行航线实现自动飞行[8]。
如图3所示,Ψ为航偏角,d为航偏距。靶机在理想飞行状态下,由航点K飞至航点K+1过程中,航偏角Ψ与航偏距d均为0,而在实际飞行中,由于风扰或者靶机自身因素,会出现偏航现象。为使得航偏角Ψ趋近于0且航偏距d趋向航偏距dα,这里需引入控制律进行飞行姿态的修正。dα为该型靶机飞行控制程序中的既定航偏距,是靶机贴近航线飞行时所容许的最小航偏距(即偏航距在dα内默认为压航线飞行)。
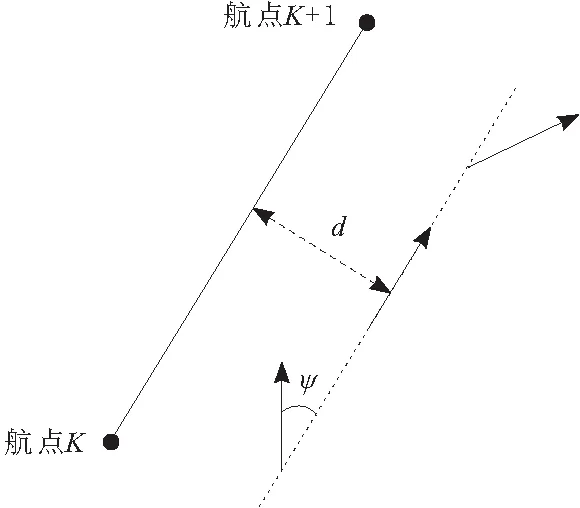
图3 靶机飞行航线图
如图4所示,根据机载传感器下传的实际飞行航迹与无人靶机的预定航迹进行对比,能够求出靶机在实际飞行中的航偏距、航偏角等信号,将其作为输入信号,依据飞行控制系统中的PID控制规律得到相应的输出信号。本次设计中,通过限幅环节将靶机滚转角输出限定为-16~16°之间,用以修正靶机飞行姿态。

图4 PID控制律
2.2 飞行控制系统的软件设计
本次设计飞行控制系统软件使用DSP配套Code Composer Studio(CCS)开发平台进行编写,采用中断通信方式。同时在理解TMS320F28335硬件结构的基础上,进行靶机飞控系统的软件设计。
DSP 芯片软件程序采用了模块化设计[9],模块化的目的是降低飞控程序的复杂度,使程序在设计、调试和维护过程中操作简单化。其中,主要有系统初始化模块、管理决策模块、输入输出子系统模块、数据通信模块和故障监测与诊断模块。TMS320F28335芯片采用定时中断模式,在中断服务程序中执行功能模块化的任务。
3 配套地面测控程序的开发与应用
高速无人靶机地面测控是整个无人靶机系统中不可或缺的组成部分,是地面靶机操纵人员与靶机交互的渠道。一个完整的地面测控程序拥有包括航迹规划、实时监测、通信连接、指令操控等集通信、控制和数据处理于一身的综合能力,是整个高速无人靶机系统的地面指挥控制中心[10]。
本次设计的高速无人靶机地面测控台主要由1台集测控与综显于一体的计算机、1个地面操纵面板(DSP操纵台)和1个数字电台组成。其中,综显、测控计算机主要用来实时监测并显示靶机当前的各种飞行参数;地面操纵面板(DSP操纵台)由油门杆和指令按钮组成,用以控制指令的发送;电台采用GE MDS系列长距离传输数字电台,用以保障靶机参数与地面指令的稳定传输。
本次地面测控程序的开发基于VC++6.0下的MFC开发平台,利用NI Measurement Studio AppWizard控件,开发一套高速无人靶机的地面测控程序,用以本次设计的无人靶机的半物理仿真试验。
创建友好的人机交互界面是开发地面测控站的关键所在。如图5所示,地面测控台由数据监测模块、航迹规划模块和指令控制模块组成。数据监测模块可以实时显示高速无人靶机地飞行参数和机载设备状态,地面靶机操纵人员主要关注飞行过程中俯仰角、滚转角和航向角变化情况,通过GPS参数栏也可以读取由机载GPS解算的下传数据,包括当前经纬度、飞行高度、飞行高度变化率、距离起飞点的东向距离和北向距离等。初始化、GPSA、GPSB、遥控、遥测和开伞指示灯便于靶机操纵人员对靶机进行故障诊断。航迹规划模块实时显示靶机的实际飞行航线。指令控制模块便于地面操纵人员在线修正靶机的航迹,确保其顺利完成飞行任务。

图5 高速无人靶机地面测控台
4 高速无人靶机的半物理仿真试验
此次高速无人靶机试验已在半物理仿真平台[11]上实现。首先使用仿真计算机来模拟飞行的状态,将仿真数据如俯仰角、滚转角、实时速度等靶机飞行时的参数信息通过电台发送给飞控系统,飞控系统反馈当前舵面信息给仿真计算机,然后数据发送给测控计算机,由测控计算机实时显示飞行数据并记录下来。
靶机仿真航迹如图6所示。靶机在预定飞行航线上进行自主飞行,从仿真航迹图可以看出转弯半径约为0.7 km,以飞机起飞点作为坐标原点,在靶机巡航1周后进入返航状态,并在预定的返航点进行伞降着陆操作。
如图7所示,靶机弹射起飞进入航线,待靶机速度降至65 m/s时增大发动机转速,靶机速度得以爬升,稳定后飞行速度约为98 m/s。巡航1周后,靶机收到伞降着陆指令,进行开伞操作,速度突变减小。
如图8所示,高速靶机弹射起飞后高度不断爬升,随即进入预定飞行高度260 m。定高巡航1周后,靶机进行伞降着陆,其高度发生突变减小。

图6 靶机仿真航迹

图7 靶机仿真飞行速度
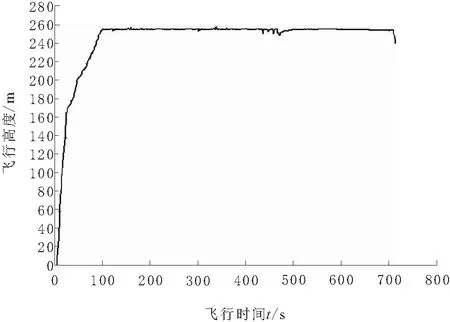
图8 靶机仿真飞行高度
如图9所示,靶机弹射起飞时升降率瞬时值很大,但随着高度不断稳定爬升,升降率逐渐减小。当靶机进入预定飞行高度260 m,升降率即趋于0。巡航1周后,靶机伞降着陆,升降率突变减小。
从整个仿真飞行过程可以看出,高速无人靶机在飞直线段和转弯段时偏航距都比较小,能够很好地按照预定航线飞行,满足军事打靶的要求。

图9 靶机仿真飞行升降率
5 结束语
根据高速无人靶机的设计要求,提出了飞行控制系统的整体设计思路,采用了TMS320F28335芯片为主控制器来进行飞控系统的设计,介绍了飞行控制系统的控制律和软件开发过程,同时开发了配套的高速无人靶机地面测控站,最后通过地面半物理仿真试验验证了本次设计。试验的结果表明,该飞行控制系统可以稳定运行,各种飞行参数均符合设计要求,能够完成高速无人靶机的飞行任务。
参考文献:
[1] 赵泽轩.无人机发展前景及实用性[J].科技创新与应用, 2016(25):95.
[2] 张翼麟,张绍芳,李鹏飞.2012年世界军用无人机发展动向及评述[J].飞航导弹, 2013(7):69-72.
[3] 郑涛,高正红,孔祥骏.无人机系统的仿真建模研究[J].飞行力学,2002,20(3):25-28.
[4] 殷奎龙.高速无人机飞行控制系统设计及软件开发[D].大连:大连理工大学,2014.
[5] 姚睿,付大丰,储剑波.DSP控制器原理与应用技术[M].北京:人民邮电出版社,2014.
[6] 仲筱艳,雷仲魁.基于DSP的无人机飞行控制系统的硬件实现[J].世界电子元器件,2003(11):60-62.
[7] 吴益明,卢京潮,魏莉莉,等.无人机地面控制站系统的应用研究[J].航空精密制造技术,2006,42(3):48-50,53.
[8] 胡寿松.自动控制原理[ M].4版.北京:科学出版社,2001.
[9] 殷奎龙.高速无人机飞行控制系统设计及软件开发[D].大连:大连理工大学,2014.
[10] 杨国梁,王玮,郭宗本.小型无人机地面控制站软件的设计与实现[J].遥测遥控,2008,29(3):12-15.
[11] 赵祯俊,钟韶君,李佳乐,等.无人机飞行控制地面仿真[J].兵工自动化,2013,32(8):32-34.
猜你喜欢
家庭影院技术(2021年3期)2021-05-21 02:15:00
铁道通信信号(2020年5期)2020-09-21 09:21:34
青年歌声(2019年12期)2019-12-17 06:32:32
无人机(2019年9期)2019-11-29 19:06:24
无人机(2018年4期)2018-09-10 20:44:28
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
铁道通信信号(2016年10期)2016-06-01 12:10:51
小学科学(2015年10期)2015-10-20 22:09:11
舰船科学技术(2015年8期)2015-02-27 15:38:47
