
地铁盾构施工穿越高速铁路车站变形监测技术
2018-06-28 02:03程岩
铁道建筑 2018年6期
程 岩
(中国铁路上海局集团有限公司 上海枢纽指挥部,上海 200071)
沪宁高速铁路设计最高速度350 km/h,目前运营最高速度300 km/h。正线线间距4.8 m。轨道结构采用CRTS-Ⅰ型板式无砟轨道,到发线采用宽枕轨道结构。地铁盾构区间下穿沪宁高速铁路常州火车站路基,基本正交,2股正线和2股到发线下方已采用混凝土板+钻孔灌注桩+CFG桩进行加固,如图1所示。图中Ⅰ,Ⅱ股道为高速铁路正线,3,4,5,6股道为到发线。
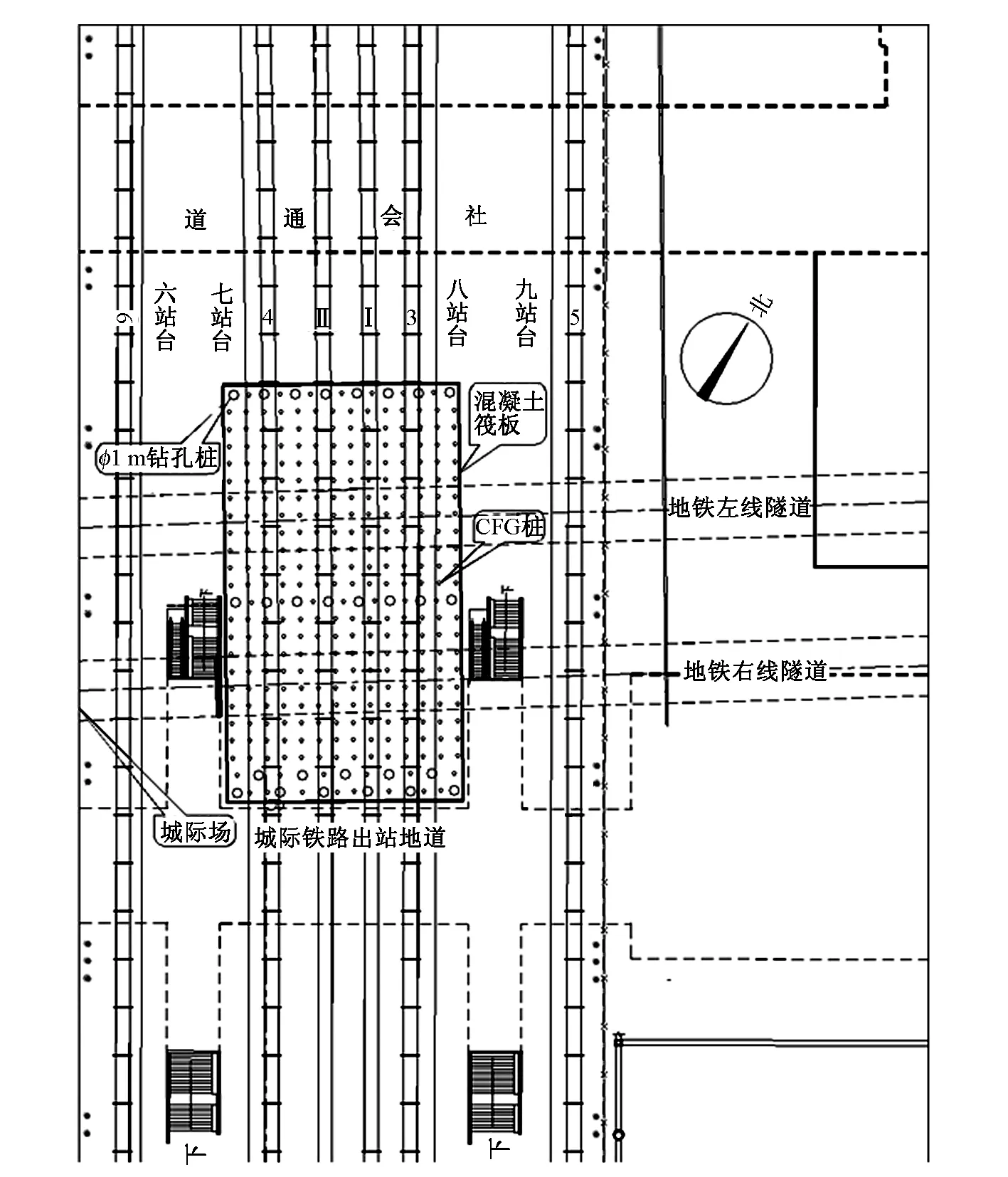
图1 地铁盾构施工与高速铁路及附属设施关系平面示意
地铁盾构穿越高速铁路车站的监测,还没有成熟的规范和标准,国内外也没有成熟的经验可以借鉴。本文以新建地铁盾构区间穿越沪宁高速铁路常州站的变形监测为例,在计算分析盾构施工对运营期高速铁路的结构和附属设施变形影响的基础上,结合运营高速铁路的特点,设计变形监测方案。采用基于机器人型全站仪的三维实时自动变形监测系统对高速铁路结构和附属设施进行数据采集,并对监测数据及时处理与分析,指导盾构施工,确保铁路行车安全,形成一套完整的监测方案。
1 地铁盾构穿越高速铁路变形影响分析
高速铁路行车对轨道不平顺性要求严格,需严格控制地铁盾构工程所引起的铁路沉降与变形以及对附属建筑物的变形影响。因此需要对盾构施工影响高速铁路变形进行理论分析和模拟计算,主要内容为:①计算分析地铁盾构施工对高速铁路的影响,评价轨道沉降与变形是否满足铁路安全运营要求,分析混凝土筏板与桩基的变形是否满足安全要求,并提出铁路安全保护措施与建议。②计算分析地铁区间盾构施工对高速铁路相关建构筑物的影响,评价建构筑物沉降与变形是否满足安全要求,并提出保护措施与建议。③提出铁路保护监测要求。
采用有限元软件MIDAS计算出施工对线路变形的影响范围和大小。所建立的有限元模型如图2所示,模型原点位于中间2#灌注桩处的地表。
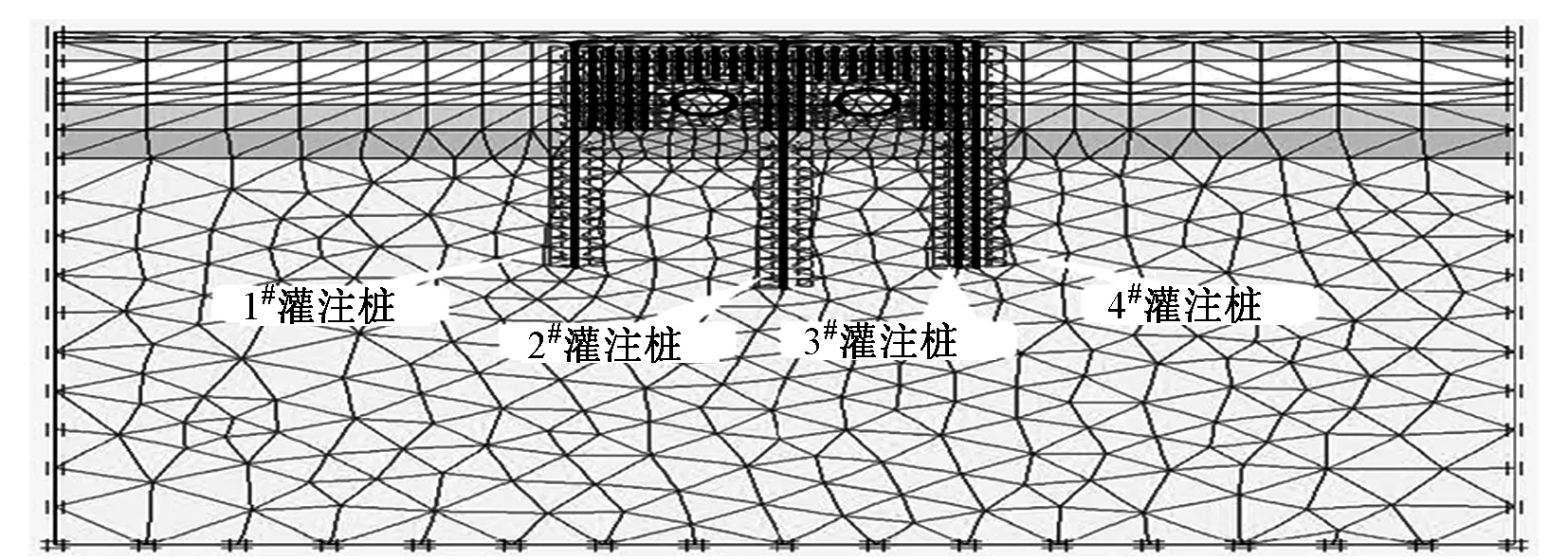
图2 盾构区间对高速铁路影响计算模型
经过计算得出:盾构施工造成沪宁高速铁路路基沉降最大值小于6 mm,可满足保护控制要求。施工过程中10 m 弦长路基沉降最大矢量差小于4 mm,可满足计划维修的静态轨面平顺性管理标准限值要求。
2 监测方案
2.1 监测范围、内容和频率
根据数值模拟计算结果,盾构穿越期间监测东西方向上的范围应为隧道中心向两侧(东西沿铁路轨道方向)各50 m的范围内的站台、路基、轨道、接触网立柱、雨棚柱及其他受影响铁路相关的建(构)筑物,南北方向上的范围为最外侧股道中心线向外30 m。
行车条件下盾构穿越期间铁路线路监测频率见表1。盾构穿越期间,根据实际情况可加密监测频率,对位移变化异常的特殊工况要适当加密观测次数,必要时进行实时跟踪监测。监测结果及时反馈到相关人员。另外,在盾构穿越期间,有专职人员昼夜对站场环境巡视,及时观察异常情况。
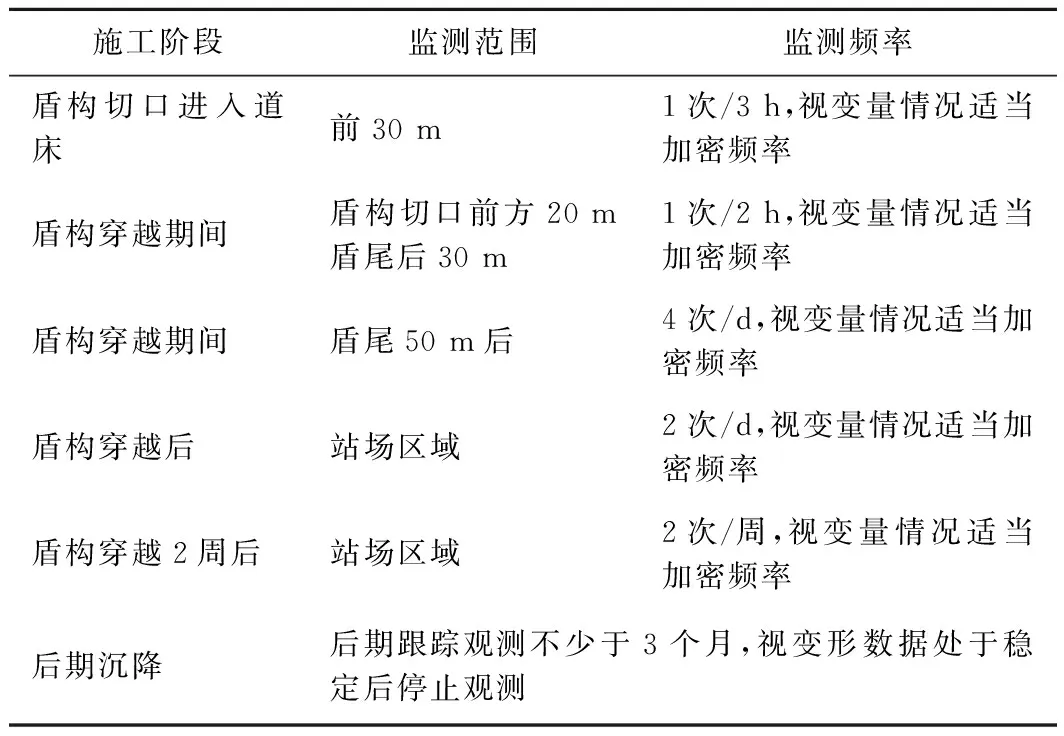
表1 盾构穿越期间铁路线路监测频率
2.2 监测精度等级
建筑变形测量应以中误差作为衡量精度的指标,并以二倍中误差作为极限误差[1-2]。本项目根据盾构施工穿越影响区内的建筑类型、变形测量等级以及项目勘察、设计、施工方案,结合JGJ 8—2016《建筑变形测量规范》的要求,采用表2的观测精度等级。
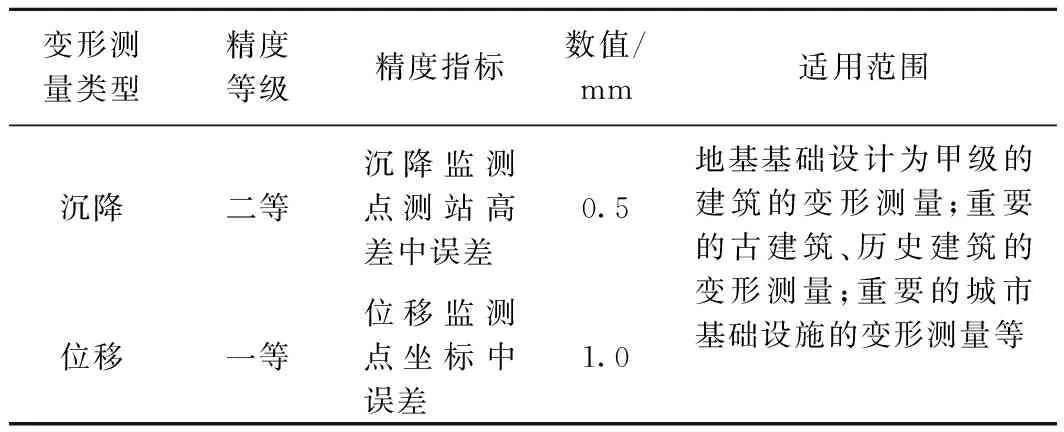
表2 变形监测精度等级
2.3 现场安全监测控制标准
监测变形控制指标应在环境调查的基础上,根据其重要性和安全性进行综合评估,并结合产权单位的要求进行确定。本工程的监测控制标准最终以施工图设计文件确定的控制标准为准。具体指标见表3。
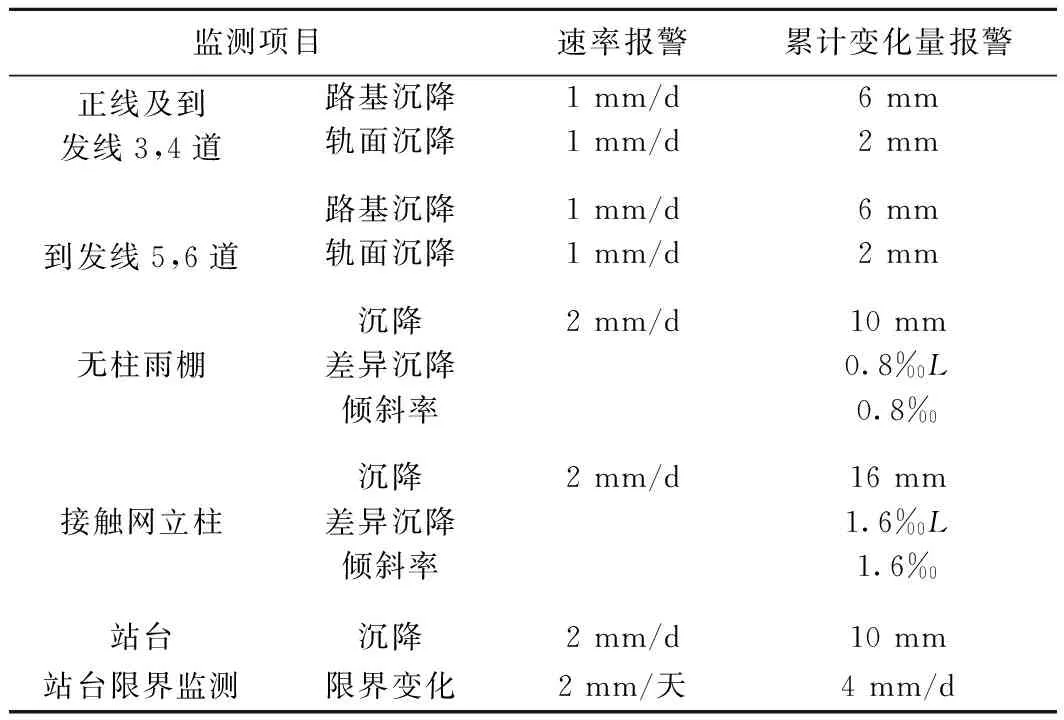
表3 一般监测项目控制指标及预警值
注:L为两测量点间距离,mm。
2.4 三级预警机制的建立
监测贯穿于施工的全过程,按照规定的程序,监测结果要及时通报各参建单位。对于发出预警的情况,各参建单位通过会商及时调整施工措施,确保安全。严格按照三级预警机制组织施工,三级预警状态判定见表4。
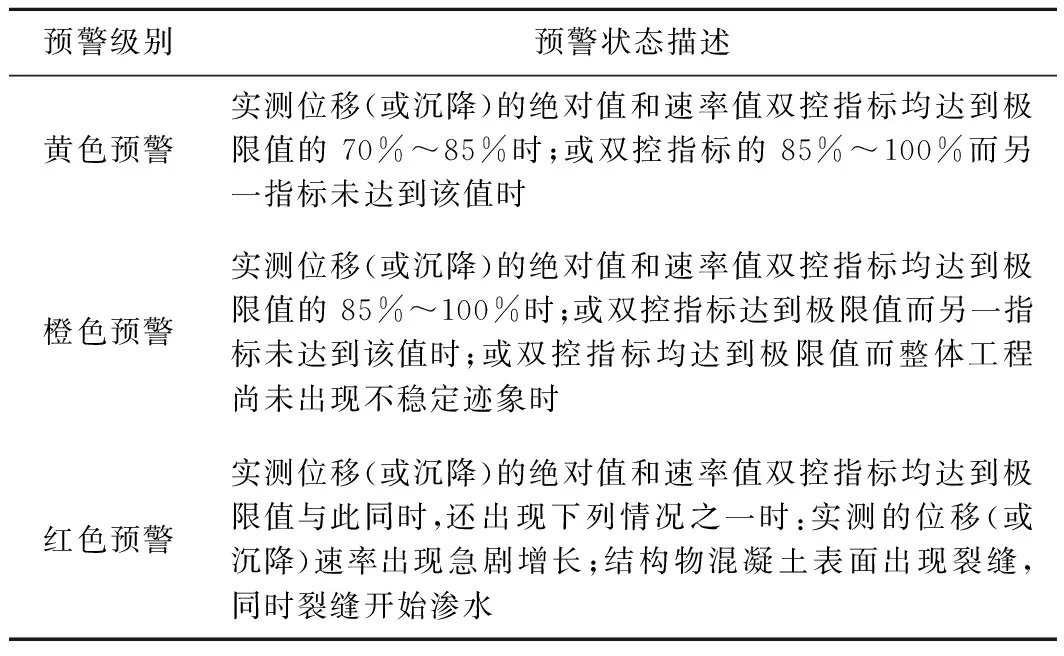
表4 三级预警状态判定
3 实时三维动态自动化监测技术
3.1 全站仪三维自由设站法
由于变形监测区域不稳定且环境复杂,因此基准点或工作基点通常设置在距离变形监测区域较远的相对稳定区域,从而限制了变形监测网的网形设计,实际观测中也易受到更多的误差源影响。而全站仪自由设站法不需要在基准点或工作基点上设站,可通过灵活的设站选择来优化监测网形,削弱误差源的影响,有效提高控制网的可靠性和精度[3-4]。
3.2 自由设站三维整体平差函数模型
三维整体平差的全站仪自由设站方法理论严密,将全站仪的直接观测值(天顶距、斜距和水平方向值)作为原始数据建立观测方程,从而得到误差方程并依据最小二乘原理进行求解[5-6]。三维整体平差模型是一种对全站仪的水平方向值、天顶距和斜距进行直接处理的平差函数模型。全站仪三维自由设站时,需后视不少于2个已知控制点,即已知值一般多于6个,而全站仪设站的未知值仅4个,故需采用最小二乘平差的方法来求解全站仪设站的未知参数[7-8]。在实际进行监测时,为确保成果的可靠性,已知控制点要多于2个,同时,为了实时的显示监测成果,必须实时解算。首先利用已知点坐标,运用最小二乘法计算设站点的坐标(X,Y,Z)及定向角(T),然后便可利用极坐标法计算出监测点的坐标。
3.3 自由测站变形监测的精度
自由测站方法的优势在于设站灵活、精度可控。自由测站的精度可根据监测需要,通过设站位置的选择以及监测点交会的次数来灵活控制,使之能够满足高速铁路工程变形监测的需要[7]。由于监测区域具有较大的施工干扰,且地质条件不稳定,因此高速铁路平面位移监测网常布设为如图3所示。
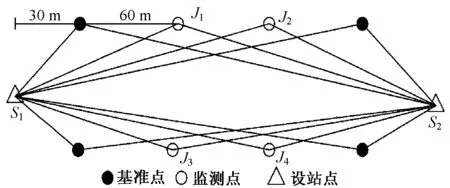
图3 高速铁路平面位移监测网
按照图3监测网形,以1″级测角精度、1 mm+每千米1 mm测距精度的观测精度在S1和S2测站上各观测2个测回。经过对多组模拟数据的平差计算,4个监测点的精度均可达0.5 mm。实际监测中,监测结果会受到大气环境、监测点重复安装误差(以CPⅢ点的重复安装为例,一般不超过0.4 mm)等的影响。通过合理设置监测网网形,采用高精度的测量机器人,则该监测方法能够将平面位移监测精度控制在1 mm内。
3.4 实时三维动态自动化监测系统
采用自主研发的实时三维动态自动化监测软件系统,程序自动驱动LEICA TM30全站仪完成多测回观测,观测时可完成各项限差指标控制。电子原始观测文件通过网络传输至服务器,在服务器端,将原始观测数据存放至数据库,并对其进行严密平差,得出各监测点的三维坐标。将结果按时序存储,系统会自动生成成果报表,客户端可查询监测的各项数据和报表。当监测成果超限时系统还会自动提醒报警(如图4所示)。
图4 实时三维自动化监测工作示意
4 工程应用
盾构穿越期间实时三维动态自动化监测系统在21 d内完成了对站台沉降、轨道沉降与位移、路基沉降与位移、雨棚柱和接触网立柱的沉降与位移共144个监测点,每个点227次的观测。盾构穿越后,自动监测系统继续对每个监测点在100 d内跟踪监测74次。系统每15 min内对1组监测目标完成数据采集,实时平差计算得到监测点的三维坐标并生成成果报表。
选取盾构中心线正上方高铁正线间路基的5个监测点数据统计结果和CGJ1208点位沉降时程图进行分析,见图5。图中CGJ1208号监测点位于盾构中心线正上方,正线路基间,下穿工点为竖曲线上坡,分为3个阶段,即盾头切入阶段(10月25日—11月8日)、盾尾脱离阶段(11月8日—11月15日)和注浆阶段(11月15日—11月28日)。
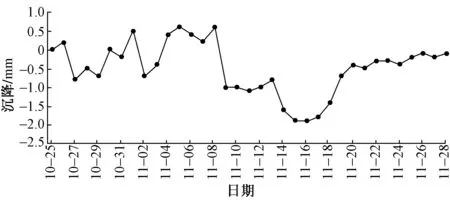
图5 高铁正线间CGJ1208测点路基沉降时程曲线
由图5可知,盾头进入后挤压土层等综合作用下路基总体略有隆起,此时在实时监测数据指导下施工单位及时调整土压平,同时要求坡度保持相对的平稳,控制纠偏量,减少对土体的扰动,整个变化由10月27日的-0.6 mm变化到11月8日的+0.6 mm(以下沉降数值为“+”均为隆起,“-”均为下沉),累计变化量为+1.2 mm,沉降速率为+0.09 mm/d。其中11月2日—11月3日为盾构机械故障期,盾构掘进停滞,在掘进过程中隆起的路基有所回落,沉降变化由11月2日的+0.5 mm到11月3日为-0.7 mm,累计变化量为-1.2 mm,沉降速率为-1.2 mm/d。11月8日—11月15日盾尾完全通过后,路基出现明显下沉,根据监测数据的变化趋势,沉降量由11月3日的+0.6 mm,变化到11月15日为-1.9 mm,累计变化量为-2.5 mm,变化速率为0.3 mm/d,盾构施工单位及时调整盾构参数,11月15日—11月28日在监测数据的指导下进行二次注浆,下沉的路基逐渐向正常值回弹,逐步解除报警。沉降量由11月15日的-1.9 mm,变化到11月28日为-0.1 mm,累计变化量为+1.8 mm,变化速率为0.12 mm/d。为防止二次注浆过量或注浆量不足,在二次注浆过程中施工单位根据监测数据的沉隆变化的情况,采取多次少量注浆的方式,最终使路基及轨道的沉降接近正常值。
盾构穿越期间监测数据验证了前期有限元模拟计算结果的正确性,以及提出的相应铁路安全和保护性措施的正确性。
5 结语
1)对穿越运营高速铁路的地铁盾构施工,在目前没有成熟监控测量规范标准的情况下,应先进行高速铁路变形影响分析,结合高速铁路控制保护标准提出监控测量的范围、内容和频率,并据此制定监控测量方案,同时采用测量机器人自动化三维监测系统,是一种有效的技术方法,经实践检验可行,具有较高的应用推广价值。
2)采用实时三维自动化监测系统,可以克服运营高速铁路行车密度大、上下车旅客多、监测点位埋设困难、数量大、监测频次密集等不利因素,可高效开展工作。
[1]黄志伟,刘晓华,龚率,等.基于三维平差的基坑监测数据处理方法探讨[J].测绘工程,2015(2):51-54.
[2]赵宗智,荆敏,王旭.上软下硬地层Ⅴ级围岩超浅埋隧道开挖技术[J].铁道建筑,2017,57(7):81-84.
[3]杨雪峰,刘成龙,罗雁文.基于自由测站的基坑水平位移监测方法探讨[J].测绘科学,2011,36(5):153-154.
[4]杨松林,刘维宁,王梦恕,等.自动全站仪隧道围岩变形非接触监测及分析预报系统研究[J].铁道学报,2004,26(3):93-97.
[5]LI B F.Surveying Network Design and Adjustment for Ballastless Track HSR:Case Study with the First HSR in China[J].Journal of Surveying Engineering,2016,142(3):1-11.
[6]马洪磊,刘成龙,宋韬,等.自由测站方法在平面控制网测量中的应用[J].测绘工程,2014,23(5):51-54.
[7]李博峰,刘成,石德斌,等.无碴轨道铁路控制网的Helmert方差分量估计[J].同济大学学报(自然科学版),2010,38(2):302-306.
[8]刘成龙,金国清,杨雪峰,等.自由测站边角交会网在隧道内平面控制中的应用研究[J].西南交通大学学报,2014,49(1):1-7.
猜你喜欢
高速铁路技术(2022年4期)2022-09-24
新型工业化(2022年5期)2022-06-17
高速铁路技术(2022年2期)2022-05-05
高速铁路技术(2022年1期)2022-03-17
建材发展导向(2021年11期)2021-07-28
铁道建筑技术(2021年4期)2021-07-21
建材发展导向(2021年24期)2021-02-12
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
模具制造(2019年7期)2019-09-25
