基于模糊PID的客车防抱死制动系统硬件在环测试试验研究
2018-06-25 05:53徐博文吴佳伟
计量学报 2018年2期
陆 艺, 徐博文, 吴佳伟, 郭 斌
(中国计量大学 计量测试工程学院, 浙江 杭州 310018)
1 引 言
防抱死制动系统(antilock brake system,ABS)的出现大大提高了汽车的被动安全性。当前针对ABS控制逻辑的研究主要停留在纯数值仿真;针对汽车硬件在环的研究主要集中在偏航稳定性、汽车稳定性等方面,但对客车ABS制动系统方面的研究较少,对实际客车ABS的研究开发缺少借鉴价值[1~5]。由此设计了一种参数自整定模糊PID控制策略,采用模糊推理的方法,对PID参数进行实时整定,使其具有较高的灵活性和自适应能力。基于国家标准利用Matlab/xPC搭建客车ABS硬件在环测试系统[6,7],对客车ABS直线制动进行了仿真测试。
2 系统设计
客车ABS硬件在环测试系统包括xPC目标实时环境、气制动系统和整车动力学模型3部分,其原理如图1所示。其中xPC目标实时环境采用了宿主机-目标机的技术途径,即“双机”模式[8]。宿主机使用Simulink运行整车动力学模型。

图1 客车ABS硬件在环测试系统原理示意图
目标机则用于执行生成的模型代码,宿主机和目标机通过TCP/IP通讯连接而成。在目标机上安装有数据采集卡和运动控制卡。数据采集卡采用研华PCI-1711,A/D分辨率为12位,采样速率为1 kHz。运动控制卡提供电机快速、慢速等多种运动控制方式,模拟驾驶员踩刹车踏板的过程。气制动系统按照真实客车制动系统并配合力传感器搭建,结构如图2所示。ABS调节器有进气阀、出气阀两个高速电磁阀,根据两者开闭状态不同可实现增压、保压、减压3种工作状态,高速电磁阀驱动芯片采用TLE6228。
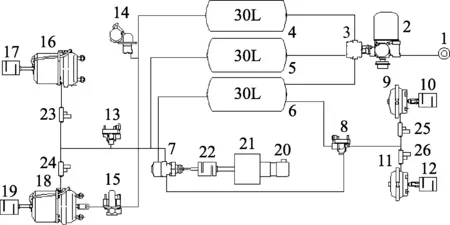
图2 气制动系统硬件组成1-气源; 2-空气干燥器; 3-四回路阀; 4,5,6-储气罐;7-制动总阀; 8-前桥继动阀; 9,11-膜片制动气室;13-后桥继动阀; 14-手制动阀; 15-差动继动阀;16,18-后桥弹簧制动缸; 20-伺服电机; 21-快速气缸; 10,12,17,19,22-力传感器; 23,24,25,26-ABS调节器
整车动力学模型由轮胎模型、7自由度车辆模型、制动器模型等组成,利用Simulink在宿主机中建立。其结构示意图如图1中虚线框内所示。轮胎模型选用GIM轮胎模型。该模型将车轮与地面的接触面长度分为粘着域(0~ε)和滑动域(ε~l)。在粘着域内,附着力由轮胎表面的切线弹性力决定;在滑动域内,附着力有滑动摩擦应力决定,则整个轮胎接地面的纵向附着力为:
(1)
(2)

7自由度车辆模型包括车身的纵向、侧向、横摆以及4个车轮的旋转,其在纵向、横向、垂向自由度上的平衡计算公式为:
(3)
(4)
(5)
式中:Iz为汽车绕相对坐标轴z轴的转动惯量,kg/m2;u为车辆纵向车速,m/s;v为车辆横向车速,m/s;γ为车辆横摆角速度,rad/s;Mz为横摆力矩,N·m;M为整车质量,kg。
制动器模型选取了领从蹄式鼓式制动器,其数学模型表现为制动气室输出力和制动器输出力矩的关系,是气制动系统硬件和仿真模型的连接部分,数学公式为:
Tb=ηκFR
(6)
式中:η为制动器效率系数;κ为制动器效能因素;F为制动气室输出力,N;R为轮胎半径,m。
3 参数自整定模糊PID控制
由于真实的道路情况复杂,而车辆自身又是一个非线性系统,具有很强的时变性。因此结合PID控制和模糊控制的优点,提出参数自整定模糊PID控制作为ABS控制策略。参数自整定模糊PID控制以误差E和误差变化率Ec作为输入,利用模糊推理的方法对PID控制的3个参数Kp,Ki和Kd进行实时整定[9~11]。模糊算法的隶属度函数采用三角形函数。输入量E,Ec和输出量Kp,Ki,Kd的隶属度函数变量等级都为7级,论域都为[-6,-4,-2,0,2,4,6],模糊子集都为{NB,NM,NS,ZE,PS,PM,PB}。其基本原理如图3所示。

图3 参数自整定模糊PID控制的基本原理
4 硬件在环仿真测试结果及分析
硬件在环仿真试验时保持制动系统管路压力在0.7 MPa,高附着系数路面的滚动附着系数为0.84,滑动附着系数为0.75;低附着系数路面的滚动附着系数为0.3,滑动附着系数为0.22。高附着系数路面和对接路面的制动初速度为75 km/h;低附着系数路面的制动初速度为55 km/h。仿真试验的ABS客车参数如表1所示。
根据GB 7258—2012对客车制动效能的规定,对客车制动的制动距离、制动减速度等进行测试,制动减速度计算公式为:
(7)
式中:dm为充分发出的平均减速度;vb=0.8v0,ve=0.1v0,v0为试验车辆制动初速度;sb为试验车速从v0到vb之间行驶的距离;se为试验车速从v0到ve之间行驶的距离。
引入附着系数利用率θ作为评判一个防抱死制动系统是否满足安全要求的指标。
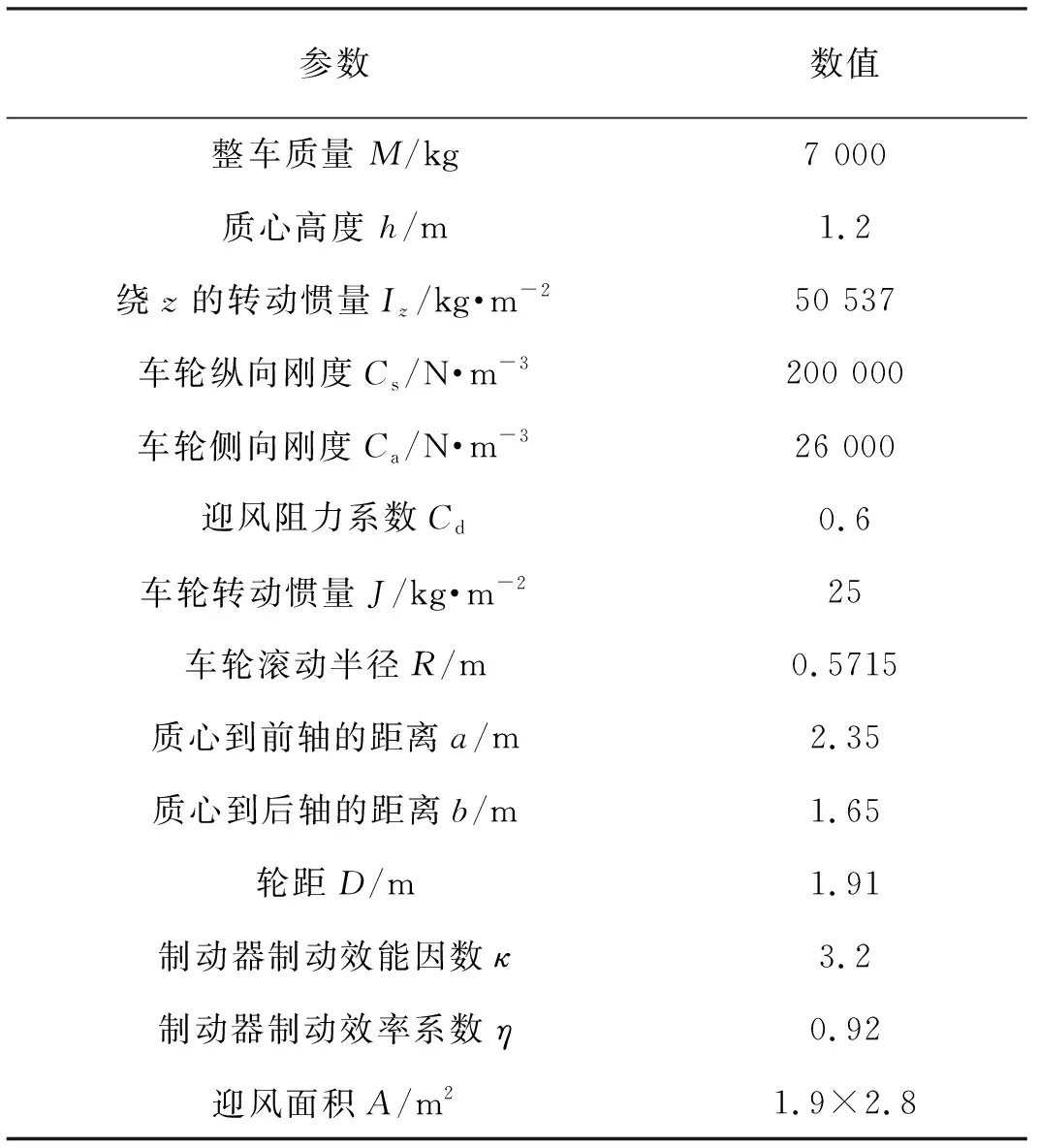
表1 ABS客车仿真参数
(8)
式中:KM为仿真模型中设置的路面附着系数;ZAL为最大制动因数,ZAL的计算方法为让车辆以不低于55 km/h的初速度开始制动,测定车速从45 km/h降低到15 km/h所需的时间,取测试3次的平均值tm,计算最大制动因数ZAL:
(9)
若防抱死制动系统满足θ>0.75,则应认为它是满足安全要求的。θ应在附着系数小于或等于0.3和大于或等于0.8的路面上测试得到。
4.1 高附着系数路面直线制动测试结果
在高附着系数路面上,试验从紧急踩下制动踏板开始,直至ABS停止工作,制动结束为止。图4为试验结果。从图4可以看出,车辆在1.3 s时开始制动,在4.3 s时制动停止。由于后轮制动力矩大于前轮制动力矩,所以制动开始后后轮的滑移率增加先于前轮。由于ABS的作用,制动过程中没有发生抱死现象,4个车轮的滑移率维持在高附着系数路面最佳滑移率0.2附近,在4.0 s之后滑移率略有上升,在0.25附近振荡。车辆制动距离为30.66 m,制动过程中无跑偏现象发生。根据式(7)计算可得dm为8.31 m/s2,根据式(8)可得附着系数利用率θ为97.90%,远远大于75%的要求。ABS控制策略制动效果较好。
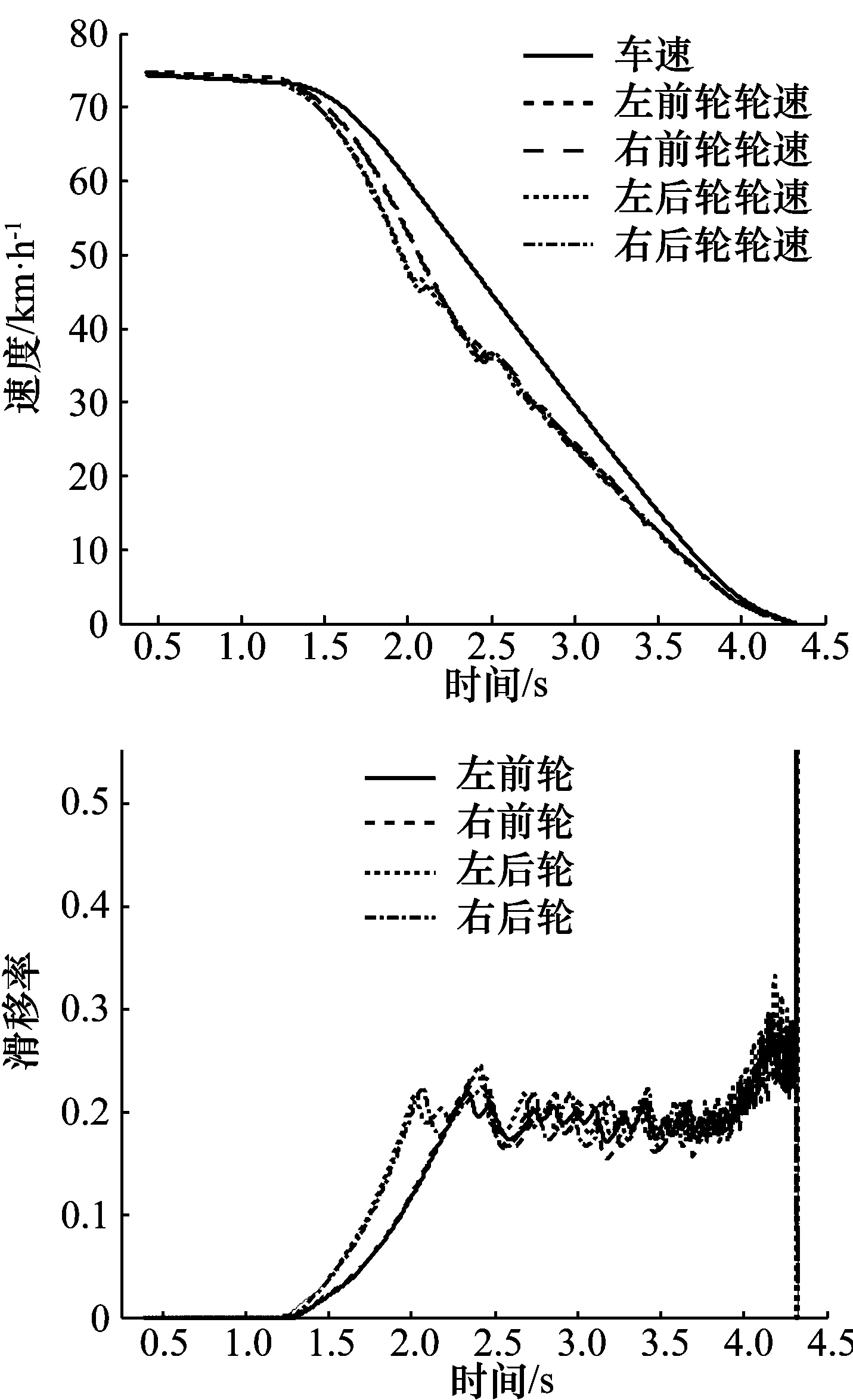
图4 高附着系数路面测试结果
4.2 低附着系数路面直线制动测试结果
图5为低附着系数路面测试结果。相比高附着系数路面,车辆的制动时间更长,在1.2 s时开始制动,9.7 s时制动结束,历时8.5 s。制动开始后,车轮滑移率快速上升至0.13左右,之后基本维持在低附着系数路面的最佳滑移率0.1附近。由于路面附着系数低,车轮与路面的作用力减小,很小的制动力矩即能改变车轮轮速,导致滑移率曲线振荡较快,制动后期滑移率曲线振荡幅度略有增大。因此,在低附着系数路面上更容易发生车轮抱死,从而发生侧滑、甩尾等事故。制动距离为48.06 m,制动过程中无车轮抱死、跑偏现象发生。根据式(7)计算可得dm为2.28 m/s2,根据式(8)可得附着系数利用率θ为95.31%,完全满足安全要求。ABS控制策略制动效果良好。
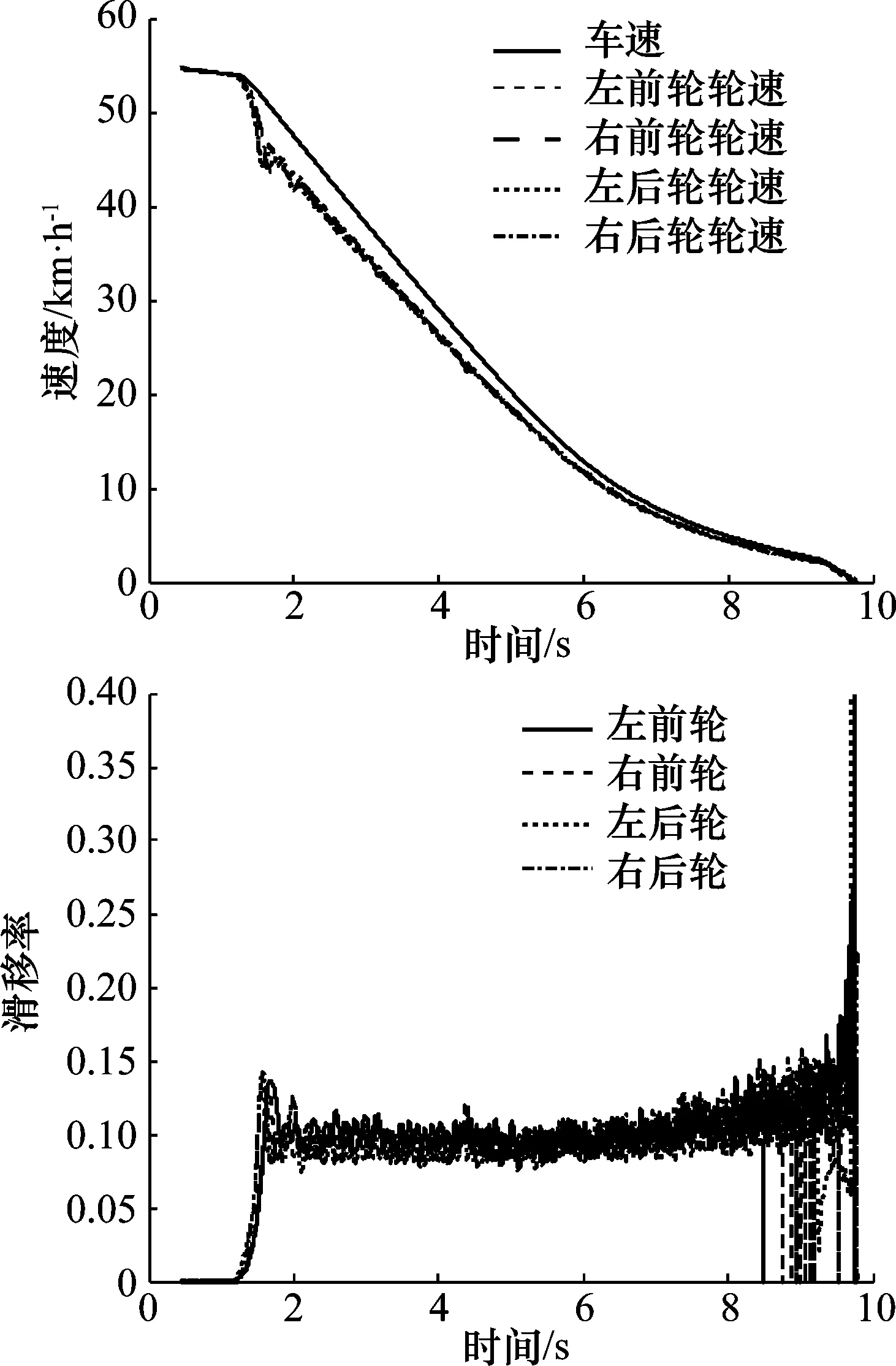
图5 低附着系数路面测试结果
4.3 与无ABS客车制动效能测试结果对比
为了测试制动效能,在同样的路面附着系数和制动初速度条件下对无ABS客车的制动距离和充分发出的平均减速度dm进行了试验,其试验结果与有ABS客车对比如表2所示。
从表2中可以发现,在高附着系数路面上有ABS客车比无ABS客车在制动距离和dm上有不同程度的减小。而在低附着系数路面上,ABS客车的制动距离反而要比无ABS客车长,这是由于当车轮与地面之间的附着力较小时,若车轮抱死则极易导致丧失转向能力、侧滑甩尾等现象,有ABS客车相比无ABS客车牺牲了制动效能,但杜绝了上述现象的发生。因此,参数自整定模糊PID控制策略在紧急制动中对提高客车被动安全性具有明显作用。

表2 无ABS客车与有ABS客车制动效能对比
5 结 论
本文根据客车ABS制动测试要求设计了参数自整定模糊PID控制策略,并在搭建的客车ABS制动硬件在环测试系统上分别就高附着系数路面、低附着系数路面制动情况进行了试验,取得了良好的制动效果。可以发现,通过实时整定Kp,Ki,Kd的参数自整定模糊PID控制策略具有良好的控制精度和鲁棒性。对比无ABS客车制动测试结果,有ABS客车在提高制动效能,防止车轮抱死等方面效果明显,对保证客车行车安全具有重大作用。参数自整定模糊PID控制策略应用于客车ABS控制是可行的,试验结果对ABS控制策略的研发具有重要意义和价值。
[参考文献]
[1] 孙骏, 尹安东, 蒋维龙, 等. 基于卡尔曼滤波的ABS轮速信号与处理[J]. 计量学报, 2011, 32(3):266-268.
[2] 吴利军, 王建强. 汽车驾驶辅助实时仿真系统的整车动力学模型[J]. 农业机械学报, 2008, 39(10):10-14.
[3] Gawthrop P J, Virden D W, Neild S A,etal. Emulator-based control for actuator-based hardware-in-the-loop testing [J].ControlEngineeringPractice, 2008, 16(12):897-908.
[4] Guvenc B A, Karaman S. Robust Yaw Stability Controller Design and Hardware-in-the-Loop Testing for a Road Vehicle[J].VehicularTechnology,IEEETransactions, 2009, 58(2): 555-571.
[5] 陆艺,朱蔷,夏文杰,等. 基于解析模型的气制动系统泄漏故障诊断研究[J]. 计量学报,2016,37(4): 402-405.
[6] 国家质量监督检验检疫总局. GB 7258—2012, 机动车运行安全技术条件[S]. 2012.
[7] 国家质量监督检验检疫总局. GB 12676—1999, 汽车制动系结构、性能和试验方法[S]. 1999.
[8] 杨涤, 李立涛, 杨旭, 等. 系统实时仿真开发环境与应用[M]. 北京:清华大学出版社, 2002:249-252.
[9] 席本强, 何毅, 丘文森. 汽车ABS的模糊自适应PID控制[J]. 辽宁工程技术大学学报(自然科学版), 2014,33(11):1551-1554.
[10] 于振中,郑为凑,丁亮,等. 动态高精度伺服称重计量秤及其智能PID控制[J]. 计量学报,2013,34(3):231-236.
[11] 付荣荣, 李东玉, 时培明. 有约束复杂随动系统模型建立与控制研究[J]. 计量学报, 2017, 38(4): 444-448.
猜你喜欢
小读者(2019年24期)2020-01-19
山东冶金(2019年3期)2019-07-10
汽车观察(2019年2期)2019-03-15
汽车观察(2019年2期)2019-03-15
汽车观察(2018年12期)2018-12-26
汽车观察(2018年10期)2018-11-06
消费导刊(2018年10期)2018-08-20
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
北京汽车(2017年3期)2017-10-14
山东工业技术(2016年15期)2016-12-01