
足球机器人视觉系统的目标识别方法研究
2018-06-25 05:57王利利李卫国曲宝福葛素霞任超群
现代商贸工业 2018年21期
王利利 李卫国 曲宝福 葛素霞 任超群
(1.内蒙古工业大学,内蒙古 呼和浩特 010051;2.固阳县职业教育中心,内蒙古 包头 014200)
0 前言
视觉系统是对整个机器人系统信号进行检测的机构,是机器人系统最关键的组成部分之一,相当于机器人的“眼睛”,是获取外界信息的唯一途径。其主要作用是通过摄像头装置采集到比赛场上的实时图像,经过图像的分析、处理,得到特定目标的实时信息,如球的位置、角度,机器人自己的位置,目标识别等,并将这些信息送入决策系统以便对机器人的运动做出决策。
1 图像识别
在机器人视觉系统中,当图像经过分割并被描述成有效特征后,需要对目标进行识别,为以后的决策提供依据。目标识别时,主要是根据目标的有效特征对图像进行筛选而达到一些目的,如足球机器人视觉系统就是利用颜色信息筛选场地图像来识别出哪个物体符合球的颜色模式。
2 区域连接及特征提取
像素需要进行连通域的分析,以达到识别目标的目的。本文为我校科研项目,在本项目的研究过程中进行了大量的实验,主要对像素的邻接性和又称编码法进行了深入的研究,最终决定采用游程编码法连接区域,通过连通标记法分析像素连通性。
像素的邻接性这一过程有4-邻接和8-邻接两种情况。如图1所示为4-邻接和8-邻接。

(a)4-邻接 (b)8-邻接
实验对4-邻接及8-邻接的图像像素进行扫描分析,采用连通标记法对整幅图像的所有像素都进行一次扫描,把同一颜色类的相邻像素连成色块,因为图像上的像素点都要被处理,所以这种方法的计算量是很庞大的,而且对于多目标的彩色图像其标记也比较复杂需要占用大量的存储空间来储存标记及标记以后的像素,于系统实时性不利。
本文最终决定采用游程编码的方法。这种方法的优点是很明显的,区域合并的计算量由像素级变为游程级,处理维数从二维降到了一维,大大减少了计算量,也保证了系统的实时性。该方法的整个过程为:首先,对已经过颜色分类的图像进行行向扫描,由于在机器人视觉中,其图像中的相邻像素是很少变化的,所以我们可以对同一行中属于同一颜色类的相邻像素用同一个游程编码表示,这将加快后面图像处理的速度(因为后面图像的处理是基于游程的而不是单独的像素)。由于图像中行方向上的像素已经被水平游程编码而连通,因此当进行后面的区域合并时,只需要考虑图像垂直方向上(即列方向)连通性。在进行游程编码的过程中要同时记录游程的长度、起始位置以及所属类别。第二阶段,从上到下纵向的扫描游程,判断相邻两行处于同一通道的游程是否邻接,来构成游程有向的图结构。每一个游程都是图的一个根,刚开始其父指针是指向自己的,对图像从上至下从左至右进行扫描,把同颜色类的相邻的游程合并,同时形成一个有向邻接表。再进行一次从上到下的游程扫描,根据邻接表将所有相连父指针都指向和它们相连的第一个根节点,依次完成图像中所有游程的指向,区域合并结束。每个区域把自己的第一个根节点地址作为区域标识。利用游程编码方法进行区域连接的过程见图2。
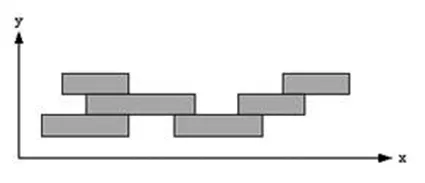
(a)生成独立的游程

(b)扫描游程的邻接关系
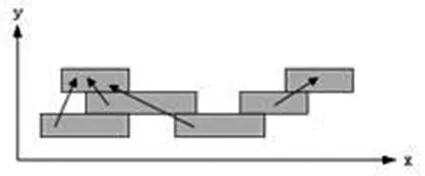
(c)父指针指向最顶根节点

(d)更新后者父指针

式中,n表示区域中游程个数,a表示游程起始像素的横坐标,l表示每个游程的长度,h表示每个游程的纵坐标。
3 目标识别
3.1 足球识别
在上述区域连接和特征提取后,对全部区域按面积由大到小的顺序进行排列,面积较大的区域有可能是目标,而面积太小的区域被认为是干扰。本文采取的方法:通过黄色区域面积的大小来识别,但是为了防止识别错误,需要增加判断条件,第一个条件是看检测到的黄色区域是否与绿色场地区域相邻接,当这两个区域不邻接说明是干扰,若邻接就认为这个黄色区域可能是球;如果通过第一个条件判断后,符合条件的黄色区域不止一个时,就进行第二个条件的判断来识别球,第二个条件是利用检测到的黄色面积与距离的平方成反比关系Ad2>d'来判断,A表示黄色区域的面积,d表示球与机器人的距离,d′是设定的阈值,如果区域满足这个条件就判定它为干扰,否则就是球。球的识别如图3所示。

图3 足球识别、白线识别实物图
3.2 白色标示线识别
白色标示线具有明显的特征:在比赛场地上,随处可见白色标示线,由于机器人的全向视觉可以观察到周围360°范围的景物,而且按照比赛场地的设置,白色标示线在场地上的分布具有明显的几何特征,如白线组成的中圈、球门区、禁区等具有圆弧、拐角等几何信息。
机器人足球比赛中,大多数比赛队伍都是利用白色标示线的信息来实现机器人的自定位,因为白色标示线受干扰少对实现精确、稳定的定位比较有利。本文利用白色标示线与绿色场地的明显对比,来识别白线。检测白色区域是否与绿色区域相邻接来识别白色区域是否为白色标示线。这种方法简单可靠,能识别出场地上大部分的白色标示线,由于采用的是逻辑判断没有复杂的数值运算,因此实时性比较好。白色标示线的识别如图3所示。
4 结语
在足球机器人视觉系统中,实时性、快速性是图像处理技术的两大特点。本文根据图像分割后的有效特征对目标识别方法进行了较深入研究,包括足球和比赛场地中的白色标示线。最终采用游程编码的方法进行区域连接,较一般的连通标记法其实时性是显而易见的,并具体的给出了足球识别和白色标示线识别的方法。
[1] 张生.机器人的目标识别与定位研究[D].合肥:安徽大学,2013.
[2] 周熬宸.基于有限配置下中型足球机器人对不确定色球识别的研究[D].天津:天津师范大学,2012.
[3] 潘亚宾,刘国栋.一种改进的类人足球机器人彩色目标识别算法[J].计算机应用研巧,2011,28(3):1195-1198.
[4] 穆颖,马晶.基于DSP的足球机器人目标识别[J].自动化与仪器仪表,2012,2(4):91-92.
猜你喜欢
高技术通讯(2021年3期)2021-06-09
文体用品与科技(2021年7期)2021-04-09
安庆师范大学学报(自然科学版)(2019年2期)2019-08-26
电测与仪表(2017年24期)2017-12-19
北京航空航天大学学报(2017年12期)2017-04-23
中国卫生统计(2016年2期)2016-06-24
铁路通信信号工程技术(2014年5期)2014-02-28
河池学院学报(2014年5期)2014-02-27
