
具有验电与接地一体化的智能挂接地线装置研究*
2018-06-22 08:30:46刘家军韩思丹
电气传动自动化 2018年2期
刘家军,韩思丹
(西安理工大学水利水电学院,陕西西安710048)
1 引言
在接触网线路检修作业中,为了确保检修人员的安全,需在相关作业区间挂接接地线。在传统的操作过程中,检修人员需携带多中绝缘工器具(验电器、接地线等)抵达现场,人工进行验电和放电操作后,确定线路无电后再手动挂接地线,在检修作业完成后,检修人员需要拆除全部接地线后再送电[1-5]。验电器与接地线是检修作业中必不可少的工具,为了保证线路作业人员的安全,验电后挂接地线步骤的连续是十分重要的[6-8]。1接触网日常检修作业的绝缘工器具种类杂,数量多,对于检修人员需要注意工具的携带、保管和维护,增加了工作量。且线路检修多为高空作业,携带多种绝缘工器具也增加了高空作业的作业强度。
文献[9]应用视频监视和远程自动化控制技术,研究了一种接触网验电、放电、接地一体化的全过程快速遥控操作装置,采用直流验电闭锁控制器作为装置的核心控制单元,控制装置验电、放电与接地,并将信息通过通信接口上传至后台系统。但是该装置舍弃了传统的绝缘操作杆,安全可靠性降低。文献[10]研制了一种可带电操作检查螺栓松紧程度的新型装置。该装置采用双管式结构,内部杆件带动头部套筒运动,尾部采用钢制的摇柄。操作杆头部使用了双齿轮结构,通过齿轮传动变换套筒方向,使得操作杆不仅可以紧固顺线路方向的螺栓还可以操作横线路方向的螺栓。该绝缘操作杆仅适用于检查螺栓松紧程度的作业。文献[11]设计了一种遥控多功能验电器,伸缩杆体顶部设置验电器,采用红外信号传递信息,电机驱动齿轮和伸缩齿条实现杆体的自动伸缩。该装置红外信号易受到干扰,且驱动装置采用齿轮和伸缩齿条增加验电杆本身的重量,增加作业人员的作业负担。
针对上述问题,本文设计了具有验电与接地一体化的智能挂接地线装置,通过可伸缩的验电杆实现在不用更换绝缘工器具的情况下,完成先验电,后挂接地线。有效减少操作人员携带检修工具的种类,提高线路日常检修工作的效率
2 总体方案设计
2.1 设计方案

图1 接触网地线杆
现有接触网地线杆如图1所示,在实际现场作业时,三节绝缘杆通过螺纹连接使用,以此达到操作距离,三节绝缘杆均为环氧树脂制成的中空杆。
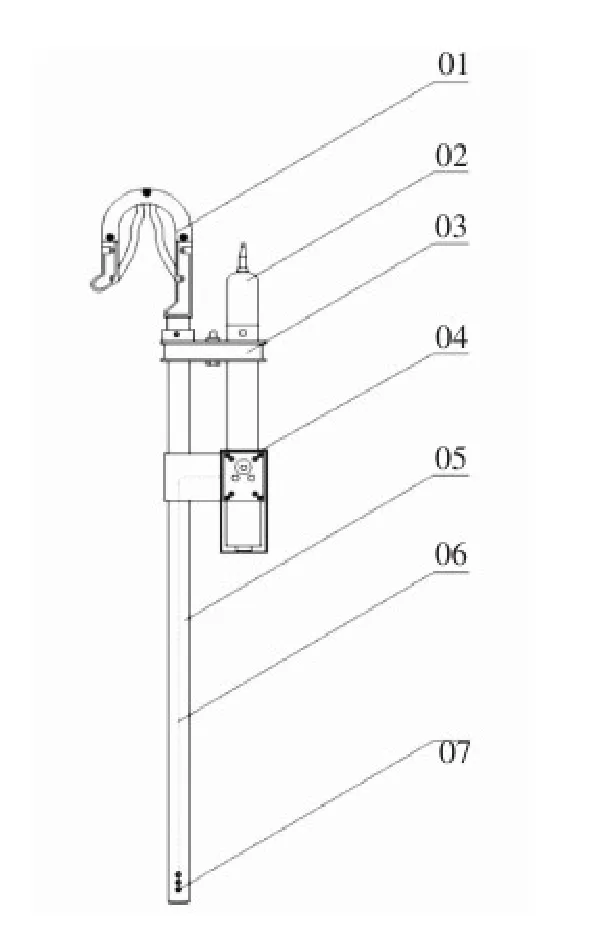
图2 装置结构示意图
具有验电与接地一体化的智能挂接地线装置如图2所示,该装置由五部分构成:地线挂钩、地线杆、验电器和伸缩式验电杆。伸缩式验电杆在验电前后处于缩回状态,如需验电,按钮控制伸缩机构运动,验电杆随着伸缩机构伸长到操作高度。在验电工作完成后,地线挂钩和地线杆用来挂接地线。这样在验电与挂接地线中间无需更换绝缘工器具。验电器与验电杆通过螺纹连接固定。该结构相对简单,操作方便,便于检修人员使用。
2.2 工作原理
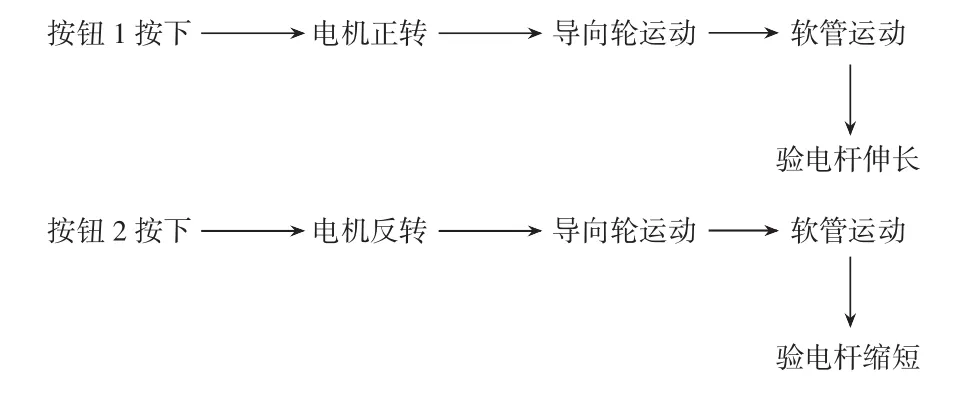
图3 机构运动传递简图
如图3所示,在进行验电杆伸缩的时候,首先按钮给单片机信号,单片机控制电机正转提供动力,使导向轮旋转运动,带动软管直线运动,验电杆伸长。同理,当电机反转时,验电杆缩回。
3 伸缩式验电杆设计
伸缩式验电杆由电机、双导向轮、PU空心软管以及三节伸缩杆组成。双导向轮与电机设置在验电杆尾部,电机提供原动力,控制双导向轮转动。PU空心软管带动三节伸缩杆伸缩。
导向轮是带有滑轮结构的器件,主要用于对软体管道或者软体线性物体(钢丝、尼龙绳等)移动过程中的方向引导。在某些项目或产品中使用导向轮可以起到省力的作用。本文导向轮伸缩机构中导向轮起传动作用,将旋转运动变换为直线运动,它是构成导向轮伸缩机构的重要组成部分[12-14]。
双导向轮,一个作为主动轮,一个作为从动轮。电机给主动轮动力后,两轮接触面间将产生法向力,由法向力产生的摩擦力将带动从动轮转动。主动轮与从动轮的转动方向相反。如图4所示,在两导向轮中间放置PU空心软管,软管管径需和双导向轮之间空隙直径相等。当主动轮顺时针转动带动从动轮逆时针转动时,与软管外壁产生摩擦力,使得空心软管向下移动。同理,当主动轮逆时针转动带动从动轮顺时针转动时,空心软管向上移动。
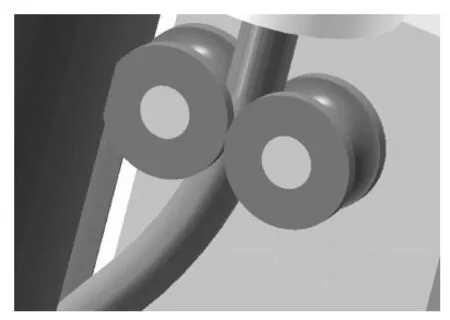
图4 导向轮伸缩机构结构简图
通过分析导向轮伸缩机构中导向轮与空心软管之间的接触应力,为二者的尺寸大小设计提供一定的理论依据。
根据赫兹接触理论可得,当导向轮与空心软管接触时,由于二者的接触部分为线面接触,所以受力后接触面形状为矩形,而且该接触面的压应力分布为一个半椭圆体,如图5所示。设矩形的长度为L,宽度为2b,图中F为外部载荷,R为导向轮半径。
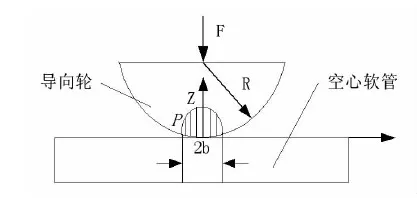
图5 导向轮与空心软管接触图
由于矩形接触面的宽度2b≪R,所以可以将接触面上的任一点按照弹性力学理论中的半无限平面来进行分析,一般圆柱体与平面的接触公式为:

则导向轮和空心软管接触部位的b和p0为
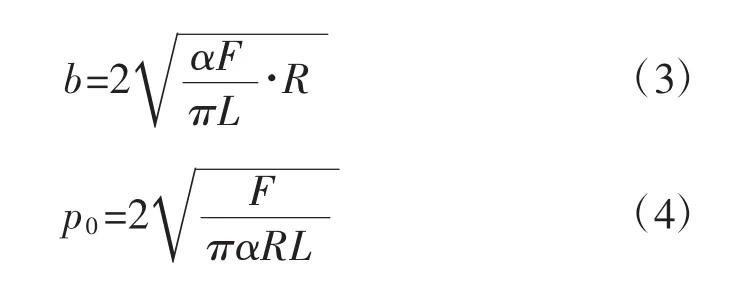
由式可得:矩形接触面的半宽度b与F、R的平方根成正比,和L的平方根成反比;最大接触应力p0与F的平方根成正比,与R、L的平方根成反比。
因而在设计时,结合双导向轮与PU空心软管之间的运动以及应力分析,选择外径19mm,绳槽半径为4mm的U槽导向轮。PU空心软管选择外径8mm,内径6mm,以此保证二者之间的相对运动。
三节伸缩杆采用钓鱼竿的结构,即杆套杆式伸缩结构,该结构是由多个同轴圆筒依次嵌套构成,且圆筒直径依次减小。第一节管嵌套在第二节管里,第二节管嵌套在第三节管里。软管固定在第一节管顶部,当空心软管向上运动时,将带动三节伸缩杆的伸长。
同理,当空心软管向下运动时,将使第一节管缩回,同时带动三节伸缩杆缩回。第一节管顶部固定有验电器。
综合考虑重量,绝缘,价格等因素,三节伸缩杆均采用PC高强度管,第一节管长度为0.68m,外径35mm,内径29mm,第二节管长度为0.7m,外径24mm,内径18mm,第三节管长度为0.71m,外径18mm,内径12mm。
4 控制系统设计
4.1 电机选择
由于步进电机适合微电脑和单片机控制,且耐用,成本低,综合考虑实际使用及性价比,本文选用步进电机作为动力源。步进电机是一种用来精确控制位置和速度的电机。步进电机的最大特点是其“数字性”,对于接收到的一个脉冲信号,步进电机在驱动器的推动下将运转一个固定的角度。如接收到一串脉冲信号,步进电机将连续运转一段距离。同时要想改变电机的转速,可以通过改变脉冲频率实现。
步进电机的选择主要是以负载的阻力矩为依据,电机的扭矩大于负载的力矩,电机才可带动负载运转。本文通过估算的方法来确定负载阻力矩。计算中摩擦阻力为主要考虑因素,在设计中选取的是PU空心软管,其摩擦系数为 0.08-0.12,计算中取其值为0.1。

式中:F—摩擦阻力,N;
μ—摩擦系数;
M—工作负荷(即为验电杆重力),N。

式中:T—阻力矩,N·m;
L—阻力作用点到转轴距离,m。则:
T= μ×M×L=0.1×0.35×9.8×1.38=0.47
通过对比价格、质量、安装尺寸等因素,最终选择42BYGH40-1.2A步进电机,其参数如表1所示。

表1 步进电机参数
4.2 电机驱动模块
步进电机驱动系统由步进电机和驱动器构成。步进电机使用时不能直接接到工频交流或直流电源上,必须通过专业的驱动器,驱动器采用单极性直流电源供电。要使步进电机步进转动,需要按合适的时序给步进电机的各项绕组通电,就能使步进电机步进转动。为配合已选用步进电机的使用,本文选择电机驱动模块L298N,其参数如表2所示。

表2 驱动模块参数
4.3 控制模块

图6 系统流程图
综合考虑已选用的步进电机和驱动模块,最终选取基于ARM Cortex-M3内核的STM32处理器。该处理器的数据处理能力为 1.25DMips/MHz,相比于同类型芯片,STM32在数据处理能力方面有着非常明显的优势;相较于51、AVR系列单片机,STM32具有结构简单、开发难度低、功能强等优势,在各领域STM32的应用十分广泛。本文通过三个按钮开关分别控制电机的正转、反转及停止,三个按钮不可同时按下,一个按钮控制一个状态,从而实现验电杆的自动伸缩。步进电机的转向同其绕组的通电顺序有关,将按钮开关信号作为系统的输入信号,ARM单片机控制输出相应的脉冲信号和方向信号,该信号通过驱动器功率放大,达到步进电机所需要的驱动电压和驱动电流,从而控制步进电机动作。
芯片选购完成后,进行编程,具体程序结构如图6所示。
5 三维建模
SolidWorks软件是最有影响力的三维软件之一,它具有非全约束的特征建模技术,为设计者修改模型提供便利,在设计的过程中修改部分设计,其他与之相关联的部分也会随之改变[15]。它集成设计、分析、加工和数据管理,通过查看模型的属性可以获得分析和加工模拟结果,在特征管理器中详细地列出了相关数据信息,作为设计者修改、优化设计的依据。SolidWorks是机械设计经常使用的建模软件之一,可以很方便地完成各种复杂模型的设计。本文采用SolidWorks进行绝缘操作杆的三维建模,所建模型如图7所示。

图7 绝缘操作杆三维模型
6 结束语
本文在对现有挂接地线装置结构分析的基础上,通过合理的机械设计和单片机控制,设计了具有验电与接地一体化的智能挂接地线装置,解决了传统接触网验电放电接地模式存在的安全隐患和不足。该装置集验电与接地功能于一体,减少了绝缘工器具的数量,极大地缩短了操作时间,提高了操作的安全性和可靠性。
(1)采用电机控制双导向轮的结构,在摩擦力的作用下实现验电杆的自动伸缩,综合考虑多种因素,确定零件型号;
(2)利用步进电机和单片机所组成的控制系统,实现验电杆伸缩。
(3)通过使用三维建模软件SolidWorks进行建模仿真,确定了装置的结构,证明了本次设计的合理性与可行性,为后续实物制作奠定了基础。
猜你喜欢
电力安全技术(2022年9期)2022-11-09 06:10:12
电气技术与经济(2022年3期)2022-07-09 08:54:12
农村电气化(2021年12期)2021-12-23 05:51:44
科学导报(2021年86期)2021-12-19 15:49:57
电气工程学报(2021年3期)2021-11-19 09:23:30
电子世界(2021年15期)2021-09-27 08:57:18
光源与照明(2021年5期)2021-03-27 03:21:49
电力安全技术(2021年1期)2021-03-20 04:50:16
油气田地面工程(2020年6期)2020-06-12 06:19:56
电气化铁道(2017年1期)2017-04-16 06:00:17
