
大气温室气体探测激光雷达及其标定技术研究进展
2018-06-22 11:27刘晓萌刘勤勇
计量学报 2018年1期
刘晓萌, 刘勤勇, 张 亮
(1. 中国计量科学研究院, 北京 100029; 2. 北京应用物理与计算数学研究所, 北京 100094)
1 引 言
自1860年以来,全球平均气温升高了(0.6±0.2)℃[1]。研究表明,化石燃料排放出的大量温室气体是导致全球变暖的主要原因。其中,二氧化碳含量较多,对全球升温的贡献也最大(约为55%)。因此,温室气体排放问题已经越来越受到世界各国的关注,针对大气二氧化碳、甲烷等气体的探测和研究成为各国温室气体计量研究的重点,我国计量部门也已开展相关研究[2~4]。
激光雷达是远程非接触式探测的有效手段,尤其是在恶劣环境或人类难以到达的区域,激光雷达比传统的采样式探测方法具有不可比拟的优势;同时,激光雷达还可实现面向区域的实时探测,及时获得区域范围内的温室气体排放空间和时间分布;此外,激光雷达无需在被探测点放置任何装置和设备,可以用于温室气体排放的隐形监测,从而有效定量监控污染源的偷排偷放行为和量值。
2 温室气体探测激光雷达的选择
大气探测激光雷达通过探测激光与大气相互作用的辐射信号来获取大气信息。根据激光与大气分子的相互作用机理,常规大气探测的激光雷达可分为米氏散射激光雷达、瑞利散射激光雷达、拉曼散射激光雷达、差分吸收激光雷达、荧光散射激光雷达等。米氏散射和瑞利散射属于弹性散射,具有较大的散射截面,基于此原理的激光雷达可用于探测大气中的尘埃、云雾等气溶胶粒子,但不可区分被探测粒子的组分;拉曼散射和荧光散射均属于非弹性散射,散射截面较小,基于此原理工作的激光雷达虽然可以区分被探测粒子的种类,但其所能接收到的有效回波信号较弱,故而难以提高探测灵敏度,多用于探测大气中含量较多的气体。在激光与大气分子非弹性相互作用的各种机制中,吸收具有较大的相互作用截面,使得利用吸收机制工作的激光雷达能达到10-6~10-8的探测灵敏度,适用于探测大气中含量较少的气体。二氧化碳和甲烷等温室气体均属于大气物质组成的原有组分,但其在大气中的体积比分别只有0.032%和0.000 2%,属于痕量气体,所以,针对二氧化碳和甲烷等温室气体的探测研究,不仅需要识别气体种类,更需要较为灵敏的探测手段。因此,基于吸收机制工作的差分吸收激光雷达是最佳选择。2014年,英国国家物理实验室(NPL)第一台差分吸收大气二氧化碳探测激光雷达研制成功[5]。与此同时,美国国家标准技术研究院(NIST)也开始了第一台快速扫描大气温室气体探测激光雷达的研制工作,并已实现对大气中激光途径区域的甲烷、二氧化碳和水蒸气的初步探测[6]。
3 差分吸收温室气体探测激光雷达的发展
激光雷达主要由激光光源、激光准直发射系统、望远镜接收系统、弱光探测系统、数据采集和分析系统组成,见图1。通常,差分吸收激光雷达光源发出两束频率相近的探测光,一个在被探测组分气体吸收峰位置,一个在吸收谷位置,见图 2(a)。通过测量这两束不同频率光的后向散射光子数,可获得该频率激光在大气空间中往返距离的衰减量,比较两个频率激光衰减量可间接推算出该气体的组分浓度。
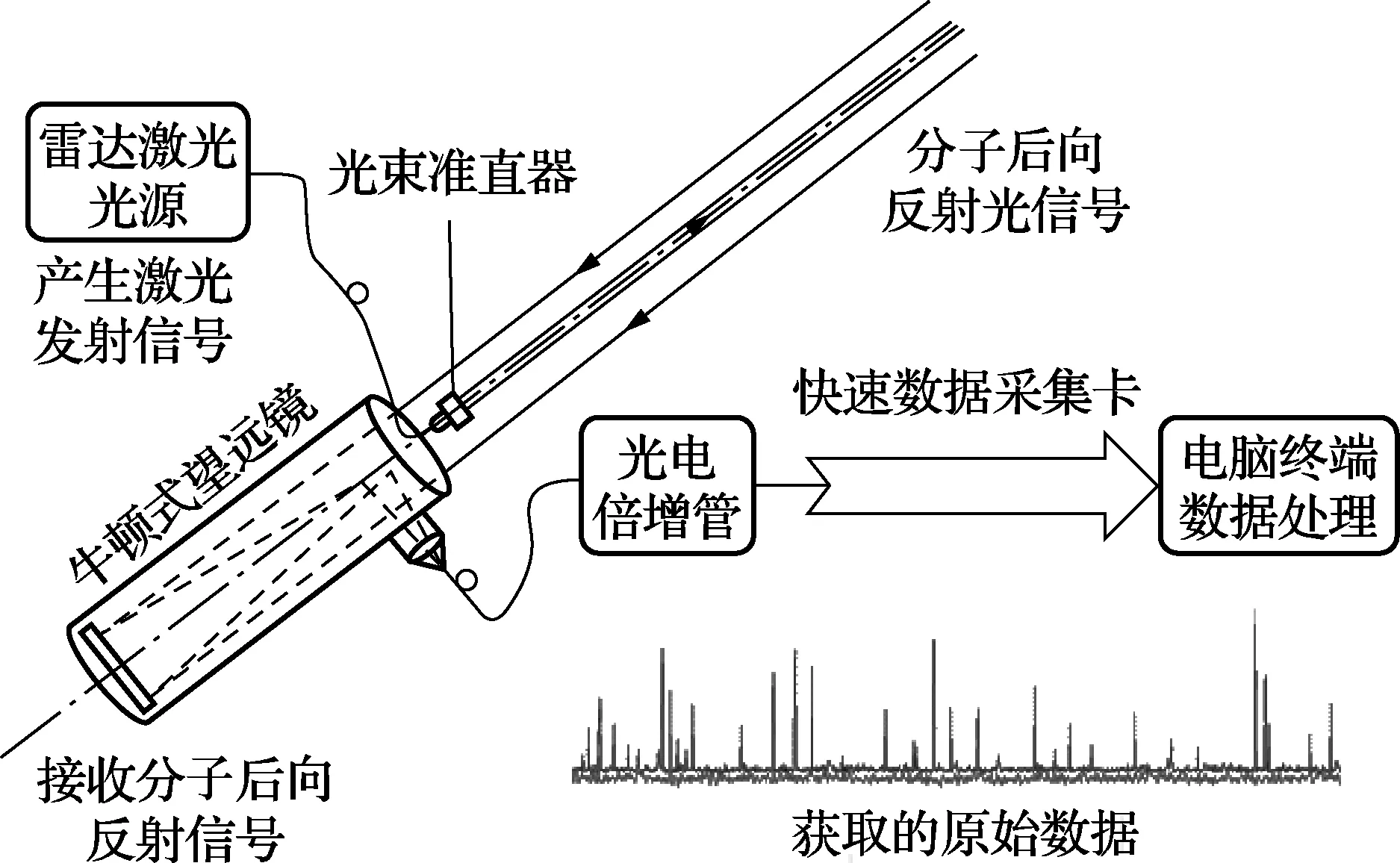
图1 大气温室气体探测激光雷达结构示意图
作为主要温室气体的二氧化碳其最常用吸收波段在2.1 μm附近,要实现在该波长附近的可调谐激光输出,通常采用染料激光器作为激光光源。然而,染料激光器体积大、能量转换效率低、能耗高,而且波长调谐的速度较慢;此外,大多作为激光介质的染料对人体的健康有一定影响。固体激光器相比于染料激光器具有体积小、稳定性好、易于操作、能量转换效率高、频率调谐速度快等特点,但很难具有染料激光器那样在保证大功率输出的情况下,同时拥有较宽的频率调谐范围;而且,要实现2.1 μm波长附近的可调谐窄线宽固体激光输出也不容易。于是,美国NIST提出了使用1.6 μm附近二氧化碳吸收峰进行光谱实验的方法[6,4],如图 2(b)所示,在 6 030~6 400 cm-1的频率区间,不仅拥有二氧化碳(CO2)的较为明显的吸收峰,同时还涵盖了其它几种温室气体甲烷(CH4)、水蒸气(H2O)和笑气(N2O)的可分辨的吸收峰,这使得使用固体激光器作为温室气体探测激光雷达的激光光源成为了可能。
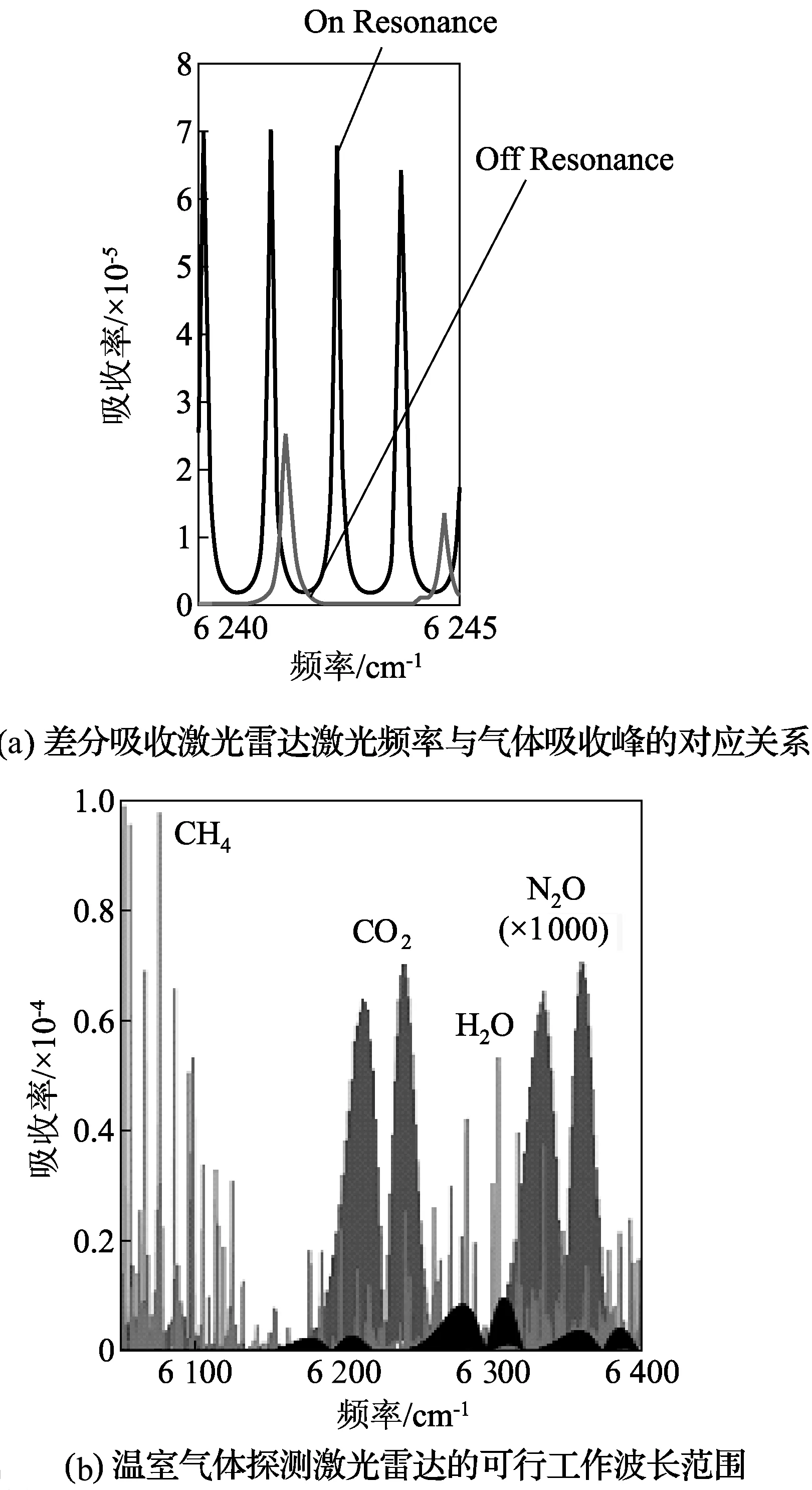
图2 温室气体探测差分吸收激光雷达的波长选择
光参量振荡器(optical parametric oscillator,OPO)是实现固体激光变频的重要技术。早期,由于OPO的功率相对较小,且可实现的变频范围小,染料激光器常作为激光雷达变频激光光源的首选。2011年,NIST的Douglass等人首先实现了大功率OPO激光器,并将其应用于温室气体探测[6],通过OPO产生脉宽4.2 ns、脉冲能量50 mJ的探测激光光源。
虽然OPO在频率调谐的速度上已经具有了一定的优势,但由于大气环境受气流影响较大,大气的温度、湿度、折射率、各种组分气体的浓度等均可在较短时间内发生变化,因此,对于大气组分探测激光雷达,更高速的变频技术必然会进一步缩短单次测量的数据采集时间,获得更准确的探测结果。NIST的Plusquellic的实验团队提出了一种能够实现更高频率扫描速度的快速频率扫描激光光源[7],该光源在25 μs内可以输出125个脉冲,目前使用的自由波形发生器(AWG)产生的脉冲间频率差为300 MHz,在25 μs内可以完整扫描37.5 GHz的频率范围,克服了传统方法中频率扫描过慢的缺点。快速扫描的意义不仅在于被测大气区域在一个测量时间段内基本特性保持恒定,而且由于扫描速度加快,可以通过多次测量来减少测量误差,104次测量二氧化碳的误差可减少到2×10-6,见图3。
不同于传统的差分吸收雷达使用的双频率光源,快速扫描激光光源可以在较短的时间内完成一段频域的扫描[8],更完整描述出整个气体吸收峰附近频率范围的完整吸收曲线,而传统的双频率差分吸收激光雷达只能提供2个频率处的吸收数据。所以,快速扫描激光雷达的探测数据通过与HITRAN数据库的拟合比对,可获得所需测量大气温室气体组分的浓度值,进一步缩小探测误差,见图4。
4 大气探测激光雷达标定技术的研究进展
大气探测激光雷达标定技术是确保各种形式、各种工作原理的激光雷达所测量数据准确、一致、可再现的有力保障。常用于雷达标定的技术有很多,例如对雷达各部件分别标定实现对整套系统的标定、采样标定、重叠带标定以及自标定等[9,10]。
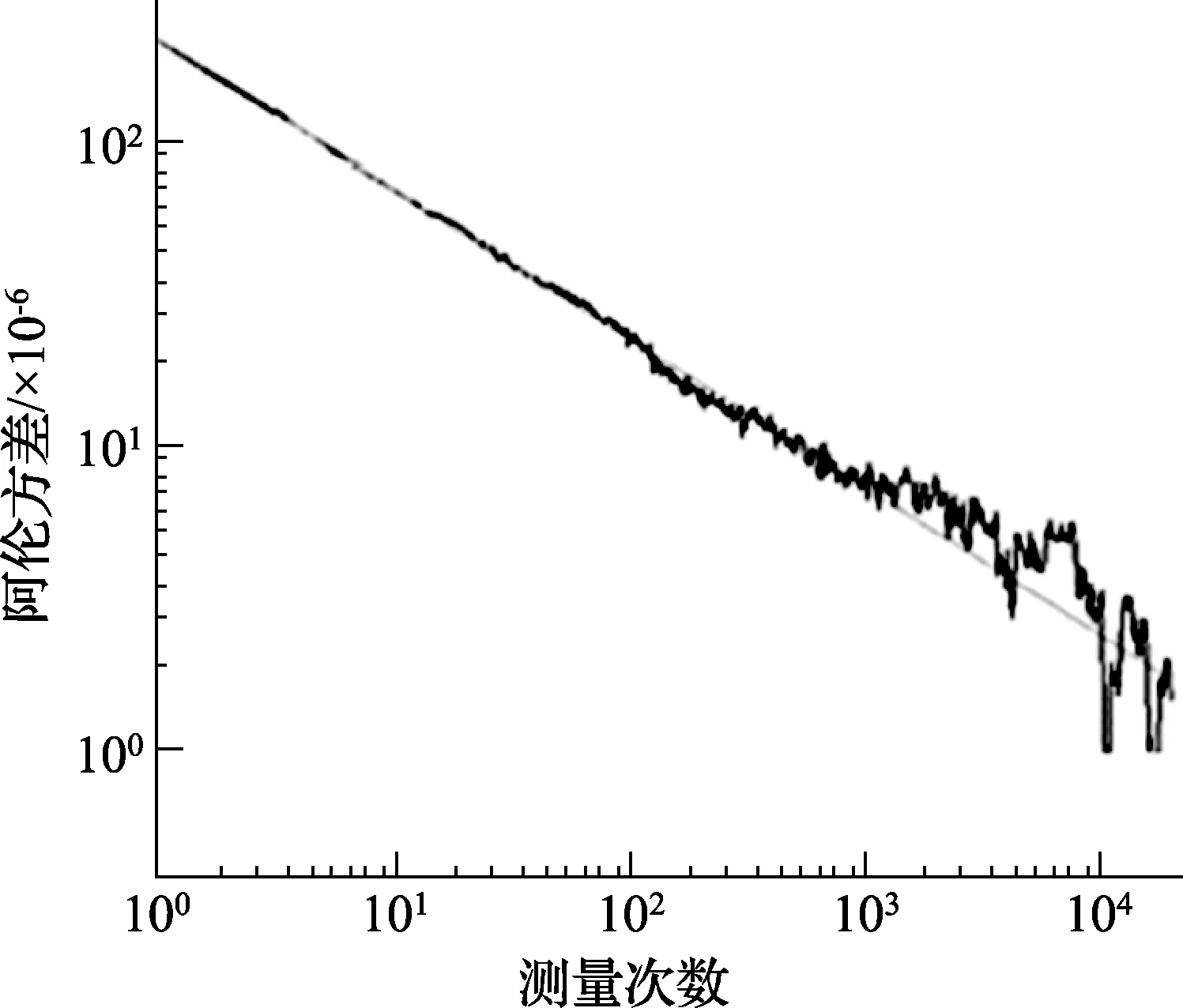
图3 CO2气体测量次数与阿伦方差的关系
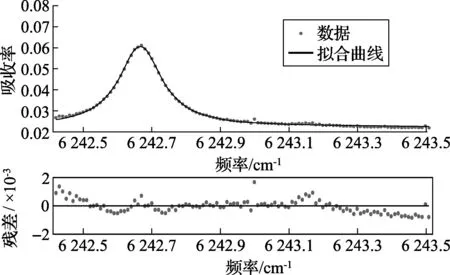
图4 快速扫描激光雷达对CO2气体 探测数据与HITRAN数据拟合
针对低空大气探测激光雷达的标定技术,直接模拟大气的标定方式更为直接,因此逐渐成为激光雷达标定的主流方法。特别是针对可区分气体组分的拉曼散射激光雷达和基于吸收原理工作的激光雷达而言,通过纳米或化学手段产生人造标准气体的方法越来越受到青睐。目前,英国NPL和美国NIST针对温室气体探测激光雷达的标定主要使用开放式大型气体池。气体池内充入已知组分、浓度或粒径的气体,通过雷达系统对该气体池内气体浓度的探测结果与已知充入标准气体浓度的比较,标定雷达数据的准确度。图5所示为美国NIST建造的激光雷达标定装置示意图,30 m测量区为两端开放区域,用于充入已知浓度的标准气体,从差分吸收激光雷达实验室发出的激光束经自由空间传播进入30 m测量区,最终在激光吸收室被黑体吸收。英国NPL的方案同样是通过建造大型气体池(长 10 m, 直径1 m)对激光雷达进行标定。
我国在此领域刚刚起步,并正在与NIST和NPL进行多种形式的合作。由于大型开放式气体池移动性差,且在标定过程中会造成二次污染,在很大程度上限制了大型气体池的使用地点和标定频率。中国计量科学研究院在充分吸收NIST和NPL研究成果的基础上,针对我国的激光雷达标定需求,计划建造小型封闭式气体池。该气体池使用多程反射室增加探测光与被测气体的作用长度,把长度约10 m的气体池缩小到小于1 m的空间,同时确保探测光与标定气体的作用距离不小于激光雷达空间分辨率(约10 m)。由于气体池体积减小且封闭,极大降低了更换气体所耗费的时间和费用;此外还可大幅降低甚至避免标定气体对大气环境的污染。
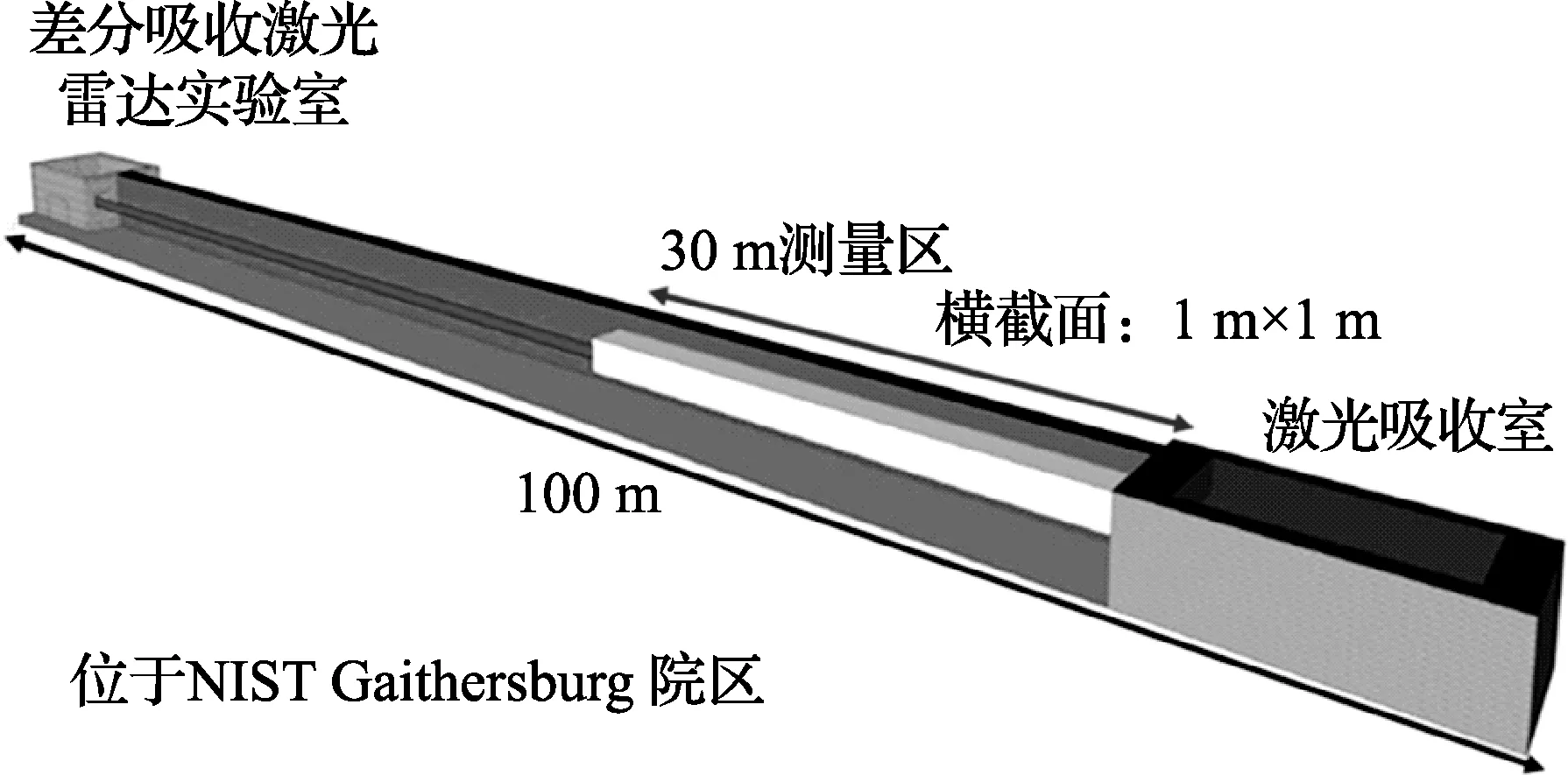
图5 NIST的激光雷达标定气体池示意图
5 温室气体探测激光雷达的应用
温室气体探测激光雷达可根据其载体分为地面雷达、车载雷达、舰载雷达、机载雷达和星载雷达。地面温室气体激光雷达通常用于组建环境监测地面基站,多个地面环境基站可组建温室气体监测基站网,通过各雷达采集数据进行网点性监测,也可进行反演模型[3]计算获得大区域范围内的被监测温室气体分布、流动等信息。车载温室气体激光雷达具有移动便利的特点,可用于发现和监测温室气体污染源;在不需要常年监测的地点,采用汽车载体可有效利用雷达系统,使同一雷达系统可用于多点、多区域测量;由于汽车的机动性强,既便于短途移动,又便于长途通过飞机或货轮运输,因此,其监测点甚至可以覆盖更广的区域,如英国NPL研制的差分吸收激光雷达(DIAL)车就已在多个国家和欧美两洲进行监测作业。机载温室气体激光雷达可以在测量范围上拓展地面短距离测量激光雷达的能力。舰载雷达则主要是用于海洋区域的探测。最受关注的是星载激光雷达,要想实现星载,激光雷达的体积、重量、能耗、稳定性等均需要达到严格的要求。虽然美国国家航空航天局(NASA)已经拥有了星载的大气探测激光雷达,但针对温室气体(如二氧化碳)探测的星载激光雷达至今还未实现。
6 温室气体探测激光雷达的发展方向
温室气体探测激光雷达的发展方向主要集中在环境治理和监测领域,其标定技术的发展也将会进一步提高激光雷达的探测准确度,使其在应用中发挥更重要的作用。温室气体探测激光雷达有望成为环保考核、污染源追踪以及碳交易领域的重要技术手段。它可以作为碳计量中区域排放源排放的直接监测手段,对垃圾填埋场、污水处理厂、大型畜牧场等区域的温室气体排放进行监测;也可以结合风速,在一个或多个点排放源的下风口,对排放源排放的污染气体的面通量进行实时监测,从而确定其排放总量;还可以监控大型输运工程或高压气站的安全。未来,也将用作区域尺度、城市尺度、国家尺度乃至全球尺度的温室气体或污染物排放模型的区域点数据采集方法,以及碳源、碳汇分析模型的基础数据采集方法。
[参考文献]
[1] IPCC. 2001: Climate Change 2001. Summary for Policymakers[R]. the IPCC Third Assessment Report,2001.
[2] 郑荣伟,冯晓娟,伍肆,等.近临界区二氧化碳声速的精密测量研究[J]. 计量学报,2017,38(1):1-6.
[3] 胡鹤鸣,王池,张金涛.城市区域碳排放测量反演研究国际进展[J]. 计量学报,2017,38(1):7-12.
[4] 赵欣月,林鸿,杨雷,等.1.6微米附近氮气展宽的一氧化碳分子线形的研究[J]. 计量学报,2017,38(1):13-18.
[5] Robinson R A, Gardiner T D, Innocenti F,etal. First measrements of a carbon dioxide plume from an industrial source using a ground based mobile differential absorption lidar[J].EnvironSciProcessesImpacts,2014, 16:1957-1966.
[6] Douglass K O, Maxwell S E, Plusquellic D F,etal. Construction of a high power OPO laser system for differential absorption LIDAR[J].ProcofSPIE, 2011, 8159:81590D-1-81590D-9.
[7] Douglass K O, Maxwell S E, Truong G-W,etal. Rapid scan absorption spectroscopy using a waveform-driven electro-optic modulator in the 1.6~1.65 μm region[J].JOptSocAmB, 2013, 30(10):2696-2703.
[8] Truong G-W, Douglass K O, Maxwell S E,etal. Frequency-agile, rapid scanning spectroscopy[J].NaturePhotonics, 2013, 7: 532-534.
[9] Bang K I, Habib A F, Müller M. LIDAR system calibration using overlapping strips[J].BoletimDeCienciasGeodesicas, 2009, 15(5):725-742.
[10] Habib A F, Bang K I, Shin S W,etal. LiDAR system self-calibration using planar patches from photogrammetric data[C]// The 5th International Symposium on Mobile Mapping Technology MMT’0. Italy Padua, 2007.
猜你喜欢
数学杂志(2022年5期)2022-12-02
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
新世纪智能(数学备考)(2021年5期)2021-07-28
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
中国惯性技术学报(2017年1期)2017-06-09
