
满足DP3动力定位能力要求的饱和潜水支持船配电系统设计
2018-06-21 03:14
机电设备 2018年3期
(天海融合防务装备技术股份有限公司,上海 201612)
0 引言
近年来,海上油气资源开发向更深海域发展,对高规格深水船舶的需求日益增加。饱和潜水支持船是海工支持船舶中的高端装备,能够为潜水人员创造适宜的工作环境,使其能在高压强条件下完成水下安装、检查、维修等作业。该船广泛应用于海底施工、水下资源勘探、搜救等领域,具有广阔的市场前景。
1 工程概况
本船为一艘具有DP3动力定位能力的300 m水深饱和潜水支持船,可在满足规定的海区作业环境条件下进行作业,并可在无限航区航行(除极区外),其效果图如图1所示。

图1 300 m饱和潜水支持船效果图
该船配备24人双钟饱和潜水系统,可搭载24名潜水员分批次进行最大水下深度300 m的饱和潜水作业;配备满足3000 m水深抢险打捞要求的ROV系统,能在超过3000m水深的海域进行各种水下抢险打捞和深海作业;配备了带升沉补偿的250 t起重机(最大作业水深3000 m),可进行深水大型结构物的起吊和安装。饱和潜水系统可联合ROV系统进行海底作业,起重机可联合ROV系统来执行深水打捞作业。
本船入DNV GL和CCS双船级。DNV GL入级符号为 DNV+1A1–E0, SF, DYNPOS AUTRO, SPS, CLEAN DESIGN, NAUT AW, DK(+), HELDK-SH, CRANE,COMF-C(3) V(3), BIS, DSV-SAT, DSV-SURFACE,BWM-T, RECYCLABLE, ECA (SOx-A)[1]。本船需按照DNV GL船级社的规范要求提供 ERN数据,经计算为ERN(99.99.99.93),动力定位能力较高。
CCS入级符号为CCS*CSA, SPS,DSV-Sat, DSV-Air,Strengthened for Deck Cargoes, Loading Computer (S,I,D),Helicopter Facilities, Lifting Appliance, DP-3, In-Water Survey, COMF(NOISE 3, VIB3)*CSM, AUTO-0, LSFO,OMBO, Clean Plus, BWMP, BWMS, GPR[2]。
2 电站及配电系统
2.1 电站及重要设备配置
电站及重要设备配置包括:1)4台3490 kW主发电机,1台900 kW停泊发电机,1台450 kW船用应急发电机,1台750 kW潜水用应急发电机;2)2台3250 kW主推进器,2台1400 kW首管道推进器,2台1600 kW首伸缩推进器;3)本船配备双钟24人饱和潜水系统;4)1台250 t主起重机,1台30t辅助起重机;5)1套月池ROV系统,1套舷边ROV系统[3]。
2.2 配电系统
2.2.1 满足DP3规范要求的配电系统分区设计
本船动力定位系统满足双船级社DP3动力定位规范的要求,即在预设的定位环境条件下,当任意部件或系统发生单点故障,甚至包括由于失火或进水造成1个舱室的完全损失后,仍能自动保持船舶的位置和首向[2]。所以本船的配电系统结构必须满足 DP3动力定位系统的要求,即电站与推进器的分组必须保持一致。
规范对DP3动力定位的要求是:电站及配电系统应至少在两个舱室进行合理布局。因此,本船设计有2个独立的机舱和 2个独立的配电板室。机舱之间具有A60及水密分隔,每个机舱内的发电机组及辅助系统都可独立运行,互不影响。配电板室之间及与各相邻机舱之间全部为A60及水密分隔。
机舱、配电板室及推进器舱分区如图2所示。

图2 机舱、配电板室及推进器舱分区图
2.2.2 配电系统结构设计
本船在设计之初根据发电机的容量,经过初步的短路电流估算,最终选择了电网的电制:
1)AC690V,用于电站电源设备、推进系统主设备、主起重机、辅助起重机;
2)AC440V,用于工程作业设备,包括潜水设备及ROV设备、泵组、风机、辅助生活设备等;
3)AC230V,用于小风机、辅助生活设备等。
根据系统特性及设备配置,共设计了12块配电板,包括:2块AC690V主配电板、2块AC440V辅助配电板、2块AC230V辅助配电板、2块ROV及收放系统配电板、2块潜水配电板、1块船用配电板、1块潜水用应急配电板。
配电系统基本配置如图3所示。
根据机舱及配电板室的分区,全船动力设备完全分开为前后2个系统。前机舱1号及3号主发电机连接至前AC690V主配电板,后机舱2号、4号主发电机及停泊发电机连接至后AC690V主配电板。
前 AC690V主配电板供电负载为左主推进器、1号首管道推进器、1号首伸缩推进器、辅起重机、主起重机2号电机、1号配电板变压器、1号潜水设备供电变压器、1号ROV及甲板设备供电变压器。后AC690V主配电板供电负载为右主推进器、2号首管道推进器、2号首伸缩推进器、主起重机1号和3号电机、2号配电板变压器、2号潜水设备供电变压器、2号ROV及甲板设备供电变压器。
在DP模式下,2块AC690V主配电板之间的母联开关全部断开,各自独立运行,分别给各自DP区内的设备供电。同时,2块AC440V辅助配电板、2块AC230V辅助配电板、2块ROV及收放系统配电板、2块潜水配电板之间的母联开关也全部断开,保证了电力系统运行的安全性、可靠性和一致性。
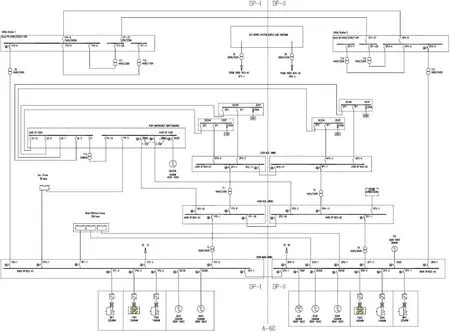
图3 配电系统单线图
由于 2套电力系统分区独立运行,相应分区的发电机容量必须满足分区用电设备、保证人员安全。通过采用需要系数法对各种 DP工况下的发电机负荷率进行计算,2个DP分区发电机容量满足使用要求。电力负荷计算结果如图4所示。

图4 电力负荷计算书
2.2.3 配电系统冗余设计
本船采用的分开独立运行式配电系统无论从结构型式上还是冗余度上都能满足DP3规范要求。2套配电系统独立运行,结构型式清晰明了,各DP分区设备由分区内的配电板供电,保证了供电的独立性及安全性。用于保持定位能力的设备独立运行,不受另外分区设备影响。即使1个分区完全损失,也不会对另外1个分区造成影响,冗余度较好。
但是,分开运行的配电系统会产生较多的故障穿越风险。所谓故障穿越,即为当1个分区发生故障时,通过共同连接的系统将故障输送至另 1个分区,从而导致2个分区均产生故障,将故障扩大化[1]。这在DP3船舶设计中是不允许发生的。
2.3 故障穿越的风险及预防
基于本艘船舶设备的特点,下列 2种情况会带来故障穿越的风险:1)对大功率设备供电时,如果使用单边供电会导致 2段电网的极度不平衡,从而影响到部分负载的使用,进而对动力定位能力产生影响,在这种情况下,只能采用不同分区的配电板供电;2)设备较多,由于空间的限制,不可避免地出现了 2个分区配电板供电的设备放置在1个舱室内的情况。
以本船在设计过程中遇到的实际情况为例,讨论当出现上述2种情况时应采取什么措施避免故障穿越。
1)大功率设备2段电网供电
本船250 t主起重机共设有3台主驱动电机,功率均为925 kW。如果采用同一DP分区内的配电板供电,会导致该区域负荷率超出发电机容量,从而导致起重机不能全功率使用。如起重机全功率使用,则其他设备将会受到影响,导致定位能力的损失。而另一分区的发电机会轻载运行。
为避免出现这种情况,经综合考虑,采用2个DP分区配电板同时供电的方案。其中前机舱主配电板给主起重机 2号主驱动电机供电,后机舱主配电板给主起重机1号和3号主驱动电机供电。后机舱由于设有停泊发电机,如起重机全功率运行,则可以将停泊发电机与主发电机并车使用。
但是,采用这种设计方法就会出现前面所描述的故障穿越问题。当主起重机本体发生火灾,则会导致2路供电电缆短路,短路故障会影响到2个DP分区的配电板而导致 2个分区全部失电。因此,必须采取措施来避免故障的发生。
本船采取了 3种方法以避免发生故障:(1)主起重机改变滑环结构型式,滑环型式不推荐使用在 DP3分网运行的船舶上,本船采用的是拖链型式,进线采用装在筒体内的接线盒型式;(2)从前配电板供电至主起重机2号主驱动电机的电缆全部在A60绝缘通道内敷设,直至筒体内的接线盒;(3)筒体内安装 2个火警探头,当 2个探头同时报警时,输出开关量信号至前后配电板,切断主起重机主电机所有供电开关。
2)同一舱室内的2个设备由2个分区配电板供电
本船配备2套ROV收放系统,1套为月池收放系统,1套为舷边收放系统,每套收放系统都配有1台脐带缆绞车,2台脐带缆绞车均布置在WROV绞车房。
根据设备本身的要求,当船舶发生最大单点故障,即船舶损失一半动力后,任何 1套收放系统还可回收ROV,速度减半。因此,每套脐带缆绞车都设有 2台电机,每台电机配有1台起动器,1台电机起动器由左舷 WROV配电板供电,而左舷 WROV配电板由前AC690V配电板经过变压器供电;另1台电机起动器由右舷WROV配电板供电,而右舷WROV配电板由后AC690V配电板经过变压器供电。这样就导致1个舱室内即有前机舱供电设备,又有后机舱供电设备,当这个舱室本身发生火灾或进水故障时,会导致 2个分区配电板短路,最终导致船舶损失所有电力系统。虽然电机供电开关设有短路保护,可在短路瞬间切断开关,但是短路时的瞬态压降会在很大程度上触发跟 DP相关的设备供电开关或接触器保护动作。
因此,为了避免1个舱室损失的故障影响2个分区,本船在WROV绞车房设置了火警探测和进水探测装置。当绞车房内的火警探头报警或者进水探测传感器达到设定值时,均送出开关量切断信号送至左舷WROV配电板,同时切断配电板上的每台脐带缆绞车的1台电机起动器供电开关,相当于切断1个分区的供电,避免故障穿越情况的发生。
另外,还有一种情况可能会导致故障穿越。例如本船主起重机设有 1台辅助电机,此电机要求在主电机工作时必须工作。由于主电机由2个DP分区供电,因此辅助电机必须保证在 1个分区失效后仍能保持工作。为满足这种情况,设计了手动切换箱。1个分区配电板均供电至手动切换箱,手动切换箱输出至辅助电机。当辅助电机的供电电源损失,可通过手动切换至另 1分区配电板供电,不影响主起重机的正常运行。虽然这样可以满足使用要求,但是可能也会带来故障穿越的问题。当手动切换箱发生火灾,短路故障会影响到 2个分区供电配电板。因此,必须在供电至手动切换箱的两个分区配电板开关上设置联锁,当 1个开关供电时,另外1个开关必须保证断开。
3 结束语
本艘饱和潜水支持船配电系统的设计既要满足动力定位DP3要求,又要注意避免分段运行的电网出现故障穿越,这种情况具有一定的代表性。文章分析了DP3船舶配电系统的设计思路,介绍了避免故障穿越的措施,可为以后同类型船舶的设计提供设计参考。
[1] DNV GL. Rules for Classification OF Ships[S].2015.
[2] 中国船级社. 钢制海船入级规范[S]. 2012.
[3] 中国船舶工业集团公司, 中国船舶重工集团公司,中国造船工程学会. 船舶设计实用手册 电气分册[M]. 北京: 国防工业出版社, 2013.
猜你喜欢
中外文摘(2022年19期)2022-12-17
大众科学(2022年5期)2022-05-18
环球时报(2022-03-29)2022-03-29
中国特种设备安全(2019年7期)2019-09-10
中国特种设备安全(2018年10期)2018-12-18
知识经济·中国直销(2018年7期)2018-07-27
数学大王·低年级(2017年8期)2017-08-04
学苑创造·A版(2017年7期)2017-06-24
文理导航·趣味课堂(2016年6期)2016-09-09
人间(2015年11期)2016-01-09
