
基于FPGA的超声波阵列测量定位系统设计
2018-06-12 06:41陈志彬宋金堂张娜乔怡豪
现代电子技术 2018年12期
陈志彬 宋金堂 张娜 乔怡豪
摘 要: 为了实现对移动物体进行定位,提高超声波定位的精度,基于可编程逻辑门列阵(FPGA),设计一个SoC硬件测量平台,对超声波信源到超声波接收阵列的角度和距离测量实现高精度定位。为提高系统的测量精度,补偿温度对测量结果产生的影响,增加了温度传感器测量环境温度。在程序设计上将TDoA与AoA融合,并结合MUSIC算法,以提高测量的精度。实际实验测量表明,该测量系统运行稳定可靠,测量速度快、精度高,有一定的实用性和推广价值。
关键词: 超声波阵列; FPGA; TDoA; AoA; MUSIC; 测量系统
中图分类号: TN725.6?34; TB559 文献标识码: A 文章编号: 1004?373X(2018)12?0028?04
Abstract: In order to realize the positioning of the moving object and improve the accuracy of ultrasonic positioning, a system on chip (SoC) hardware measurement platform is designed based on FPGA, on which high?precision positioning for the measurement of angle and distance from ultrasonic source to ultrasonic receiving array can be realized. To improve the measurement accuracy of the system and compensate the impact of temperature on measurement results, a temperature sensor is added to measure environment temperature. In the program design, time difference of arrival (TDoA) and arrival of angle (AoA) are fused, and combining with the multiple signal classification (MUSIC) algorithm, the measurement accuracy is improved. The actual experimental measurement results show that the measurement system operates stably and reliably, and has high measurement speed and accuracy, which has a certain practicality and promotion value.
Keywords: ultrasonic array; FPGA; TDoA; AoA; MUSIC; measurement system
0 引 言
距离和角度是确定两个物体相对位置的量,传统的定位方法包括卫星定位、基站定位、RSSI、WiFi定位、UWB定位等。这些民用定位信号可以达到几米到几十米的精度。但是这些测量方式无法完成最后一段高精度测量。卫星定位受云层和建筑遮挡,基站定位多径干扰严重,无法完成最后一段高精度定位。传统超速波定位只测量距离。没有测量角度,导致测量精度低[1?3]。
本文基于FPGA硬件平台设计一套超声波阵列测量系统,能够通过蓝牙先接收信源发来的同步信号,并采用TDoA(Time Difference of Arrival )的方式分别测量出信源到每个阵元的距离,然后结合阵列的溫度补偿出真正的距离,计算AoA(Arrival of Angle),最后结合MUSIC(Multiple Signal Classification)算法进一步提高波达角的精度[4?7] 。
1 超声波定位原理

超声波一般是指频率大于20 kHz的机械振动波。超声波测距可采用传播时间检测法进行,即测量超声波从发射换能器发出经空气传播到接收换能器的传播时间t,将t与其在空气中的传播速度v相乘,就得到超声波此时的传播距离S。由于超声波在空气中的传播速度与温度相关[8?10],则传播距离为:
2 硬件系统设计
硬件系统由接收端和超声波信源发射端组成。发射端由电源、MCU、温度传感器、超声波发送模块、蓝牙测量同步等组成;接收端由电源、FPGA、多路温度传感器、超声波阵列、蓝牙测量同步等组成。具体接收定位系统如图3所示。
2.1 超声波发送系统
由于本文采用的是TDoA声音单程传播时间测距方式,所以采用一对蓝牙4.2模块做无线时间同步。前面分析电磁波传播速度远大于声音在空气中的传播速度,所以可以忽略同步传播的时间,单片机在处理蓝牙同步和发送超声波的时间长度为τ。实际设计要求定位距离小于8 m,在室温为25 ℃时,声音在空气中的传播速度大约是340 m/s。从发送到接收,声音最大渡越时间(单位:s)为:
所以设置发射端以10 Hz的频率发送超声波,供主机进行连续的TDoA距离测量,进而能提高测量速度,防止丢失信源。
2.2 超声波接收测距定位系统
接收端采用LatticeXO2?4000 FPGA作为主处理器,开发工具为Lattice公司的Diamond 3.8,使用该软件为外部时钟、超声波阵列、温度传感器、蓝牙等模块分配管脚。为了方便将处理后的测量结果输出,设计了一条通用SPI串行总线,这样可以将测量结果传到其他的MCU,DSP,FPGA中,供其二次开发。FPGA的内部框架设计如图4所示。为了提高测量精度,通过CLOCK模块将输入的50 MHz时钟倍频到100 MHz。外部处理器可以通过SPI总线访问内部寄存器,见表1。操作CDR(Control Data Reg)控制数据寄存器,可以对超声波接收定位寄存器的工作模块进行设置。当系统开始测量时,每一次测量的结果都会保存到各自的DR(Data Reg)数据寄存器中,而超声波阵列每个阵元的工作状态则保存到SR(Status Reg)状态寄存器中。超声波阵列(Ultrasonic Array)和温度传感器(Temperature Sensor)则将处理的结果发送到角度距离测量单元(Angle Distance Unit),通过优化的TDoA与MUSIC算法计算出波达,并将结果保存到各自的Data寄存器中。其他外设可以通过SPI总线连接到SPI BusBridge,读写相应的寄存器,控制片上系统实现测距和测量角度功能。
2.3 超声波接收测距定位系统FPGA内部寄存器设计
超声波接收测距定位系统FPGA内部寄存器设计如表1所示。
3 系统程序设计
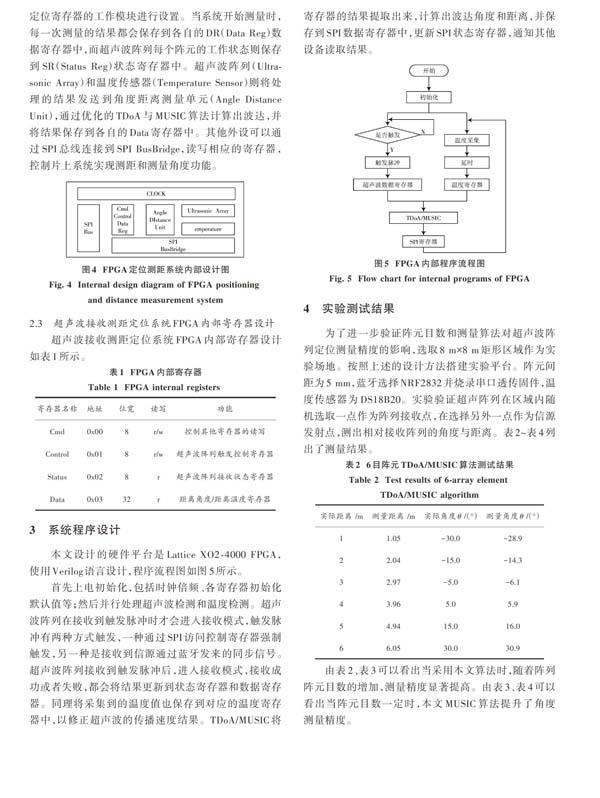
本文设计的硬件平台是Lattice XO2?4000 FPGA,使用Verilog语言设计,程序流程图如图5所示。
首先上电初始化,包括时钟倍频、各寄存器初始化默认值等;然后并行处理超声波检测和温度检测。超声波阵列在接收到触发脉冲时才会进入接收模式,触发脉冲有两种方式触发,一种通过SPI访问控制寄存器强制触发,另一种是接收到信源通过蓝牙发来的同步信号。超声波阵列接收到触发脉冲后,进入接收模式,接收成功或者失败,都会将结果更新到状态寄存器和数据寄存器。同理将采集到的温度值也保存到对应的温度寄存器中,以修正超声波的传播速度结果。TDoA/MUSIC将寄存器的结果提取出来,计算出波达角度和距离,并保存到SPI数据寄存器中,更新SPI状态寄存器,通知其他设备读取结果。
4 实验测试结果
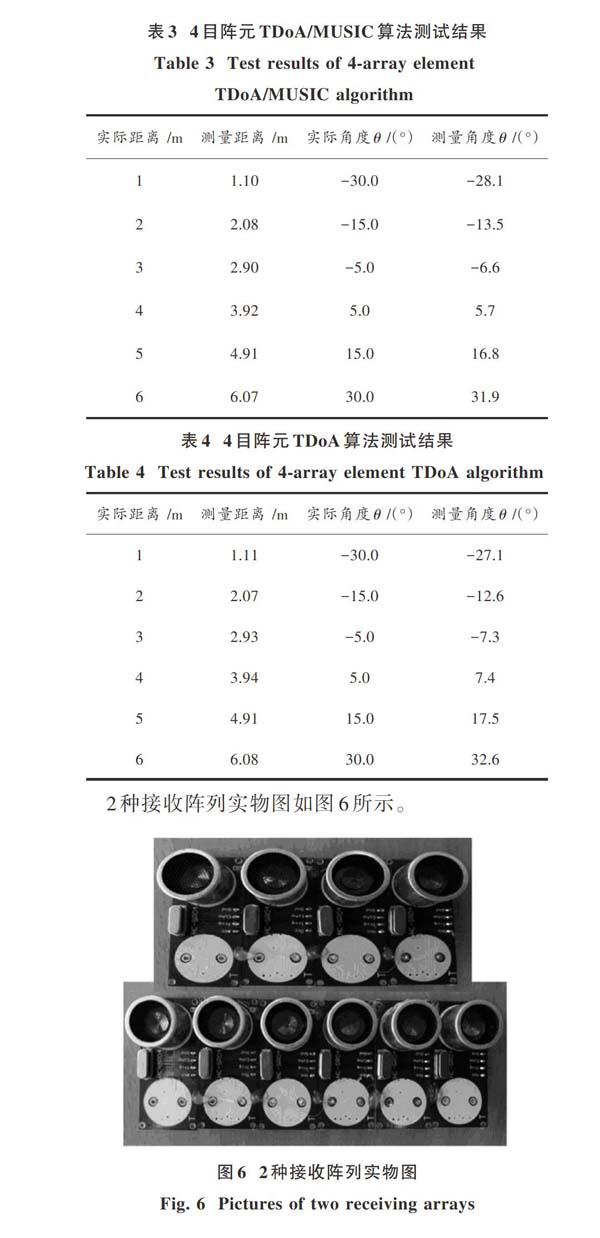
为了进一步验证阵元目数和测量算法对超声波阵列定位测量精度的影响,选取8 m×8 m矩形区域作为实验场地。按照上述的设计方法搭建实验平台。阵元间距为5 mm,蓝牙选择NRF2832并烧录串口透传固件,温度传感器为DS18B20。实验验证超声阵列在区域内随机选取一点作为阵列接收点,在选择另外一点作为信源发射点,测出相对接收阵列的角度与距离。表2~表4列出了测量结果。
5 结 语
本文提出一种以FPGA为核心的超声波阵列测量定位系统。该系统采用先进的MUSIC和TDoA算法,设计SOC硬件平台,使用蓝牙4.2同步发送和接收。而且为了提高精度,采用超声波阵列接收处理信源发来的信号,由FPGA计算出信源相对阵列的距离和角度。实验表明,该系统具有测量精度高、速度快、性价比高等优点,因此具有一定的实用价值和推广价值。
注:本文通讯作者为陈志彬。
参考文献
[1] 刘哲,陈日林,滕鹏晓,等.基于平面传声器阵列的声源定位系统[J].声学技术,2011,30(2):123?128.
LIU Zhe, CHEN Rilin, TENG Pengxiao, et al. Sound source localization system based on planar microphone array [J]. Technical acoustics, 2011, 30(2): 123?128.
[2] 李昌禄,苏寒松.超声波定位系统的研究[J].实验室研究与探索,2013,32(2):39?44.
LI Changlu, SU Hangsong. An ultrasonic positioning system [J]. Research and exploration in laboratory, 2013, 32(2): 39?44
[3] 董永峰,王安娜,周艷聪,等.一种新的基于RFID的室内移动机器人自定位方法研究[J].计算机应用研究,2016,33(3):749?753.
DONG Yongfeng, WANG Anna, ZHOU Yancong, et al. Research on novel self?localization method for indoor robot based on RFID [J]. Application research of computers, 2016, 33(3): 749?753.
[4] MEDINA C, SEGURA J C, TORRE A D L. Ultrasound indoor positioning system based on a low?power wireless sensor network providing sub?centimeter accuracy [J]. Sensors, 2013, 13(3): 3501?3526.
[5] 仲崇庆,杨录,张艳花.高精度超声回波渡越时间算法研究[J].仪表技术与传感器,2016(3):108?110.
ZHONG Chongqing, YANG Lu, ZHANG Yanhua. Algorithm study of high?precision ultrasonic echo signals [J]. Instrument technique and sensor, 2016(3): 108?110
[6] 关维国,高阳,姚清志.基于最优线性无偏估计的TDOA定位算法[J].计算机应用研究,2015,32(8):2472?2474.
GUAN Weiguo, GAO Yang, YAO Qingzhi. TDOA location algorithm based on best linear unbiased estimation [J]. Application research of computers, 2015, 32(8): 2472?2474.
[7] 寇海洲.基于超声波的定位系统研究与实现[J].数据通信,2008,11(3):49?52.
KOU Haizhou. Research on localization algorithm of wireless sensor network based on ultrasonic [J]. Data communications, 2008, 11(3): 49?52.
[8] 杨秀增,杨仁桓.基于FPGA的高精度超声波测距仪设计[J].现代电子技术,2017,40(1):137?139.
YANG Xiuzeng, YANG Renhuan. Design of high?precision ultrasonic range finder based on FPGA [J]. Modern electronics technique, 2017, 40(1): 137?139.
[9] 卜英勇,王纪婵,赵海鸣,等.基于单片机的高精度超声波测距系统[J].仪表技术与传感器,2007(3):66?68.
BU Yingyong, WANG Jichan, ZHAO Haiming, et al. Ultrasonic distance measure system with high precision based on single?chip microcomputer [J]. Instrument technique and sensor, 2007(3): 66?68.
[10] 王浩,谭振文,王治彪,等.基于STM32的分体式超声测距与目标定位系统[J].仪表技术与传感器,2017(2):58?61.
WANG Hao, TAN Zhenwen, WANG Zhibiao, et al. Separated ultrasonic ranging and targeting system based on STM32 [J]. Instrument technique and sensor, 2017(2): 58?61.
[11] 刘永勤.对称矩阵特征值分解的FPGA实现[J].现代电子技术,2017,40(12):15?18.
LIU Yongqin. Implementation of symmetric matrix eigenvalue decomposition with FPGA [J]. Modern electronics technique, 2017, 40(12): 15?18.
[12] 何子述,黄振兴,向敬成.修正MUSIC算法对相关信号源的DOA估计性能[J].通信学报,2000,21(10):14?17.
HE Zishu, HUANG Zhenxing, XIANG Jingcheng. The performance of DOA estimation for correlated signals by modified MUSIC algorithm [J]. Journal of China Institute of Communications, 2000, 21(10): 14?17.
