
远程遥控式智能果园喷药机器人的设计
2018-06-08 12:55曹玮鑫张金砖李东坤汪鹏夏旻飞康璐
湖北农业科学 2018年8期
曹玮鑫 张金砖 李东坤 汪鹏 夏旻飞 康璐
摘要:针对果园病虫害防治难的问题,设计了一种适合远程遥控操作的智能喷药机器人。经试验验证,该机田间作业最大爬坡角达33°,作业速度达5.65 km/h,机械臂水平调节角度能达到180°,喷药高度能达到1~3 m,无线控制和视频传输在无遮挡环境下可传输距离200 m,少量遮挡环境下为100 m。该机为果园病虫害防治提供了一种新的方法。
关键词:果园喷药机器人;关键部件;设计
中图分类号:TP242 文献标识码:A 文章编号:0439-8114(2018)08-0114-03
DOI:10.14088/j.cnki.issn0439-8114.2018.08.028
Design on Remote Control Orchard Spraying Robot
CAO Wei-xin,ZHANG Jin-zhuan,LI Dong-kun,WANG Peng,XIA Min-fei,KANG Lu
(School of Engineering,Anhui Agricultural University,Hefei 230036,China)
Abstract: In view of the difficult problem of insect pest control in orchard, an intelligent spraying robot suitable for romote control operation was desigened. After testing the machine field maximum climbing angle of 33 degrees,the operating speed of up to 5.65 km/h,the mechanical arm level adjustment angle can reach 180 degrees,spraying height can reach 1~3 m,wireless video transmission and control in no circumstances can block 200 m transmission distance,a small amount of occlusion under the environment of 100 m. This machine provides a new method for the prevention and control of orchard diseases and insect pests.
Key words: orchard spraying;key component;design
植保機械以其高效率、低污染的优势在现代农业发展的病虫害防治及粮果高产方面起到了关键作用,国内外相关学者在植保机械方面进行了各方面的研究。如龚艳等[1]建立了植保机械适用性综合评价指标体系,为植保机械的推广应用提供了科学依据,王杰等[2]从风机的性能、模拟及试验研究方面分析了植保机械专用风机的研究现状,蔡晨等[3]研制出了小型助力推车式果园喷雾机,邱白晶等[4]对变量喷雾技术进行了研究分析。此外,在植保机械的喷雾机性能关键技术、动力底盘、喷雾机喷杆结构优化、喷雾机机架减震设计、自动对靶喷雾控制系统、远程控制系统设计等方面亦进行了大量研究试验[5-10]。国内诸多学者对植保机械进行了大量研究,取得了丰硕的成果,但针对果园智能喷药机械尚需进一步研究。
本研究针对果园智能喷药机械,设计研发了一种远程遥控式智能喷药机器人,该机采用橡胶履带行走机构具有转弯半径小、接地面积大、跨沟越埂能力强等特点,采用喷药机械臂机构具有根据不同果树调节喷头喷药形式达到喷药分布均匀的优势。
1 整机结构
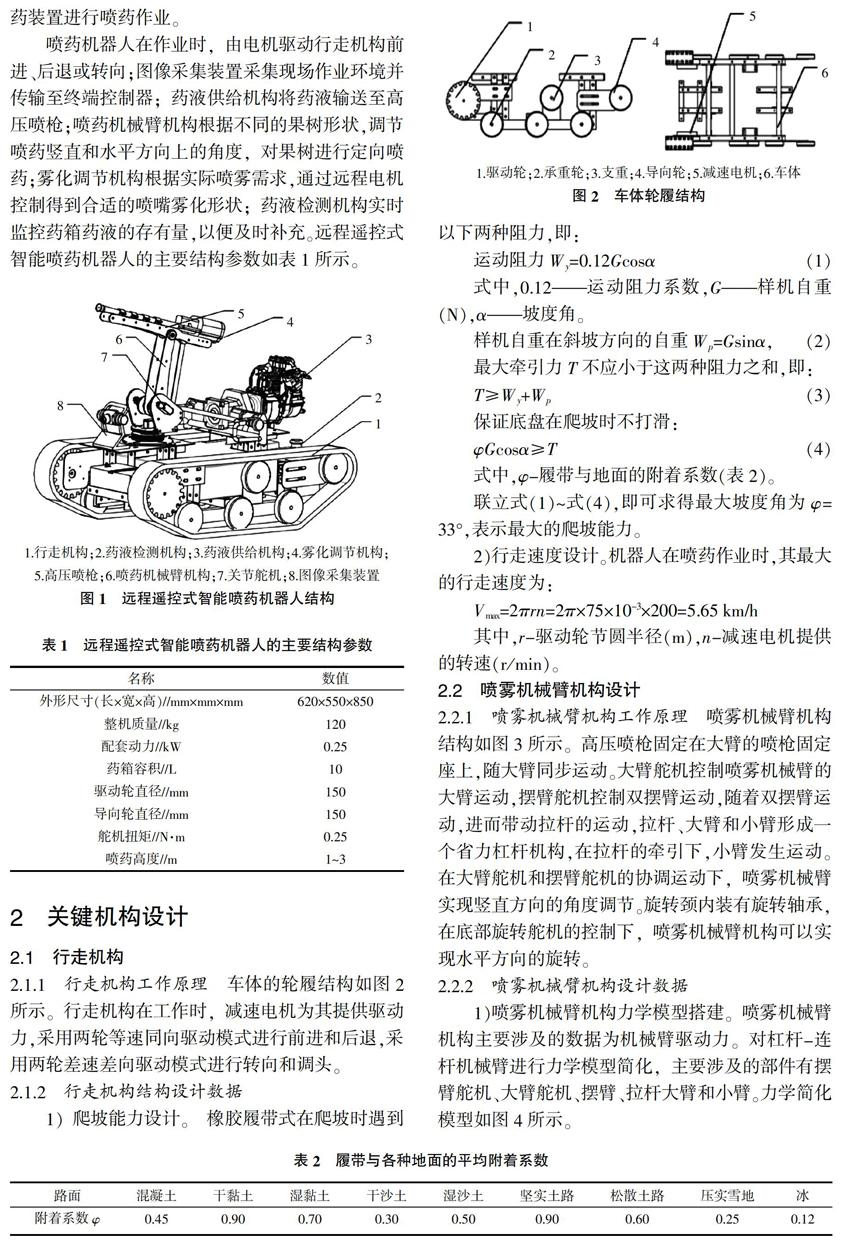
远程遥控式智能喷药机器人的结构如图1所示,主要由行走机构、药液检测机构、药液供给机构、雾化调节机构、喷雾机械臂机构、图像采集装置和终端控制器组成。其中,喷药装置和图像采集装置均固定安装在行走机构上并随着行走机构的移动而移动;喷药装置用于喷射药液;图像采集装置用于采集行走机构的行走路况视频;终端控制器用于获取图像采集装置所采的信息,并根据获取的信息控制喷药装置进行喷药作业。
喷药机器人在作业时,由电机驱动行走机构前进、后退或转向;图像采集装置采集现场作业环境并传输至终端控制器;药液供给机构将药液输送至高压喷枪;喷药机械臂机构根据不同的果树形状,调节喷药竖直和水平方向上的角度,对果树进行定向喷药;雾化调节机构根据实际喷雾需求,通过远程电机控制得到合适的喷嘴雾化形状;药液检测机构实时监控药箱药液的存有量,以便及时补充。远程遥控式智能喷药机器人的主要结构参数如表1所示。
2 关键机构设计
2.1 行走机构
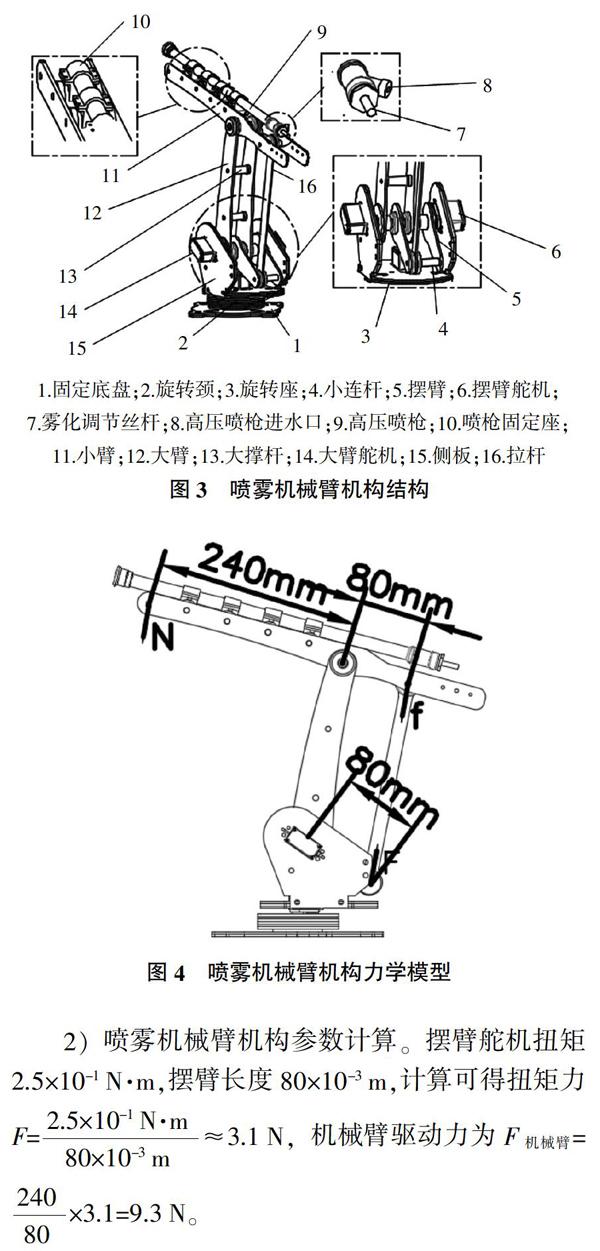
2.1.1 行走机构工作原理 车体的轮履结构如图2所示。行走机构在工作时,减速电机为其提供驱动力,采用两轮等速同向驱动模式进行前进和后退,采用两轮差速差向驱动模式进行转向和调头。
2.1.2 行走机构结构设计数据
1)爬坡能力设计。 橡胶履带式在爬坡时遇到以下两种阻力,即:
运动阻力Wy=0.12Gcosα (1)
式中,0.12——运动阻力系数,G——样机自重(N),α——坡度角。
样机自重在斜坡方向的自重Wp=Gsinα, (2)
最大牵引力T不应小于这两种阻力之和,即:
T≥Wy+Wp (3)
保证底盘在爬坡时不打滑:
?渍Gcosα≥T (4)
式中,?渍-履带与地面的附着系数(表2)。
联立式(1)~式(4),即可求得最大坡度角为?渍=33°,表示最大的爬坡能力。
2)行走速度设计。机器人在喷药作业时,其最大的行走速度为:
Vmax=2πrn=2π×75×10-3×200=5.65 km/h
其中,r-驱动轮节圆半径(m),n-减速电机提供的转速(r/min)。
2.2 喷雾机械臂机构设计
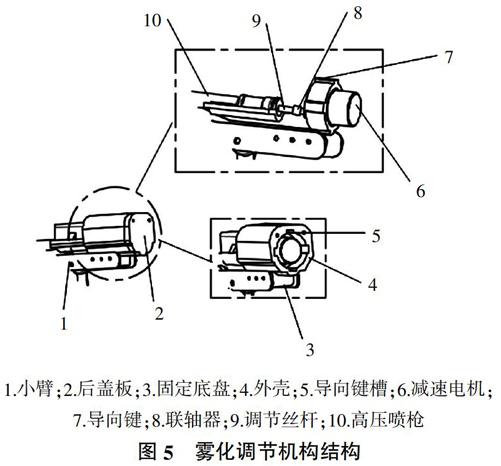
2.2.1 喷雾机械臂机构工作原理 喷雾机械臂机构结构如图3所示。高压喷枪固定在大臂的喷枪固定座上,随大臂同步运动。大臂舵机控制喷雾机械臂的大臂运动,摆臂舵机控制双摆臂运动,随着双摆臂运动,进而带动拉杆的运动,拉杆、大臂和小臂形成一个省力杠杆机构,在拉杆的牵引下,小臂发生运动。在大臂舵机和摆臂舵机的协调运动下,喷雾机械臂实现竖直方向的角度调节。旋转颈内装有旋转轴承,在底部旋转舵机的控制下,喷雾机械臂机构可以实现水平方向的旋转。
2.2.2 喷雾机械臂机构设计数据
1)喷雾机械臂机构力学模型搭建。喷雾机械臂机构主要涉及的数据为机械臂驱动力。对杠杆-连杆机械臂进行力学模型简化,主要涉及的部件有摆臂舵机、大臂舵机、摆臂、拉杆大臂和小臂。力学简化模型如图4所示。
2)喷雾机械臂机构参数计算。摆臂舵机扭矩2.5×10-1 N·m,摆臂长度80×10-3 m,计算可得扭矩力F=■≈3.1 N,机械臂驱动力为F机械臂=■×3.1=9.3 N。
2.3 雾化调节机构
雾化调节机构结构如图5所示。雾化机构主要由减速电机、导向键槽、导向键和调节丝杆四个部分组成。喷雾作业时,根据实际喷雾需要,减速电机通过联轴器带动调节丝杆,减速电机在导向键槽内前进或者后退,完成调节丝杆的松紧。当减速电机正向旋转时,调节丝杆变紧,电机在导向键槽内前移,喷嘴液滴为团雾状;当减速电机反向旋转时,调节丝杆变松,电机在导向槽内后移,喷嘴液滴为射流状。
2.4 药液检测机构
药液检测机构原理如图6所示。药液检测系统具体实现功能步骤为:通过液位传感器检测液位,检测到最低液位(药箱药液的10%)和最高液位(药箱药液的90%)时,然后将信息通过主机WiFi模塊上传给从机的WiFi模块,从机收到后进行相应的处理,当液位处于最低和最高液位时,蜂鸣器不报警;否则,蜂鸣器报警。
3 实证试验
3.1 试验条件
2016年11月于安徽农业大学农萃园对样机进行了速度测定、机械臂水平调节角度测量、喷药高度、雾化状况测试、药液检测测试以及传输距离测试。试验用液体为不含悬浮杂质的清水,液体温度和场地温度均为19 ℃,自然风速小于1 m/s。
3.2 试验结果与分析
根据试验数据计算获得的试验结果参数如表3所示。样机试验表明,喷药机器人喷药较为流畅,能够实现预期的各项作业功能。
4 结论
1)根据果园作业特点设计了一种远程遥控式智能喷药机器人。该机能提高机器在各种作业环境下的通过性能,具有能应对喷雾作业过程中振动的能力,同时能适应不同高度果树的施药作业要求,也能调节高压喷嘴的雾化形状,以达到喷药分布均匀的优势。
2)该机行走速度能达5.65 km/h,机械臂水平调节角度能达到180°,喷药高度能达到1~3 m,药箱液位达到最低液位(药箱药液的10%)和最高液位(药箱药液的90%)时能自动报警。该机可实现果园喷药作业的自动化,同时可降低劳动力成本,避免药物对作业人员造成健康伤害。
参考文献:
[1] 龚 艳,张 晓,刘 燕,等.基于层次分析法的植保机械适用性综合评价方法[J].农业机械学报,2016,47(9):73-78.
[2] 王 杰,陶振洋,茹 煜,等.风机在农林植保机械中的应用研究现状及展望[J].中国农机化学报,2016,37(9):67-74.
[3] 蔡 晨,薛新宇,丁素明.小型助力推车式果园喷雾机的研制[J].中国农机化学报,2013,34(1):134-136.
[4] 邱白晶,闫 润,马 靖,等.变量喷雾技术研究进展分析[J].农业机械学报,2015,46(3):59-71.
[5] 林立恒,侯加林,吴彦强,等.高地隙喷杆喷雾机研究和发展趋势[J].中国农机化学报,2017,38(2):38-42.
[6] 施 鹏,薛新宇,王振龙,等.果园动力底盘喷雾机的发展现状[J].中国农机化学报,2013,34(6):27-31.
[7] 邱白晶,何耀杰,盛云辉,等.喷雾机喷杆有限元模态分析与结构优化[J].农业机械学报,2014,45(8):112-116.
[8] 陈树人,韩红阳,陈 刚,等.喷杆喷雾机机架动态特性分析与减振设计[J].农业机械学报,2013,44(4):50-53.
[9] 许林云,张昊天,张海锋,等.果园喷雾机自动对靶喷雾控制系统研制与试验[J].农业工程学报,2014,30(22):1-9.
[10] 梅银成,祁力钧,冀荣华,等.温室自走式弥雾机远程控制系统的设计与试验[J].中国农业大学学报,2015,20(1):170-175.
[11] 李 超,张晓辉,姜建辉,等.葡萄园立管风送式喷雾机的研制与试验[J].农业工程学报,2013,29(4):71-78.
猜你喜欢
风机技术(2021年3期)2021-08-05
中国特种设备安全(2021年3期)2021-07-28
冶金设备(2020年2期)2020-12-28
现代装饰(2020年7期)2020-07-27
艺术启蒙(2018年7期)2018-08-23
海峡姐妹(2017年7期)2017-07-31
Coco薇(2017年5期)2017-06-05
焊接(2016年5期)2016-02-27
组合机床与自动化加工技术(2014年11期)2014-03-01
舒适广告(2008年9期)2008-09-22
