
基于视频检测的信号交叉口左转车辆非法变道监测系统
2018-06-07 06:02谢晨刘子健马永建郭映志彭丽如
神州·中旬刊 2018年5期
关键词:智能交通
谢晨 刘子健 马永建 郭映志 彭丽如
摘要:通过对左转车辆非法变道现象的研究,分析其对交通流产生的影响,并且根据左转车辆非法变道的特征进行违法车辆的识别与检测。
关键词:左转车辆;违法变道;视频检测;智能交通
引言
在早晚高峰时期,道路车流量大,左转车辆较多,致使左转车道出现长排队现象,一些想要左转的机动车在直行车道前行过程中缓慢移动,寻找时机,进而强行变道进入左转车道。根据《中华人民共和国道路交通安全法》第四十五条:机动车遇有前方车辆停车排队等候或者缓慢行驶时,不得借道超车或者占用对面车道,不得穿插等候的车辆。虽然该行为违反法律,但是由于该违法行为不易发现,处罚困难,所以仍有许多司机存在侥幸心理,导致该违法行为一直存在。
车辆强制变道过程中既可在左转车通行时强行插入左转车道,又可随时改为直行从而逃避交警追责,且机动车违法变道插队时,变道起始点离路口较远,违法行为隐蔽。国内对于违法变道的检测较少,且对违法变道的检测多利用图像处理技术,有些地区仍通过人工观察监控视频的方法进行检测,方法落后,漏检率高,大量消耗人力,物力。
本项目意在通过视频检测技术实现对信号交叉口常发路段的非法变道行为进行特征识别,取证抓拍,实现现场执法至非现场执法的转变。这样既节约大量的人力物力,又有效的缓解交通拥堵,减少车辆刮蹭发生的几率。
1违法变道危害分析
1.1违法情况调查
选取吉林省长春市南湖大路与亚泰大街交叉口西进口为基础数据搜集与研究对象,采取高处架设摄像机,连续两周对该交叉口进行数据搜集。通过对数据的整理统计发现,在所调查的车辆中,有5%的车辆有强制变道行为,在这其中有56%的车辆在虚线处强制变道,80%的车违法车辆在距停止线40m~120m发生强制变道行为。
1.2延误分析
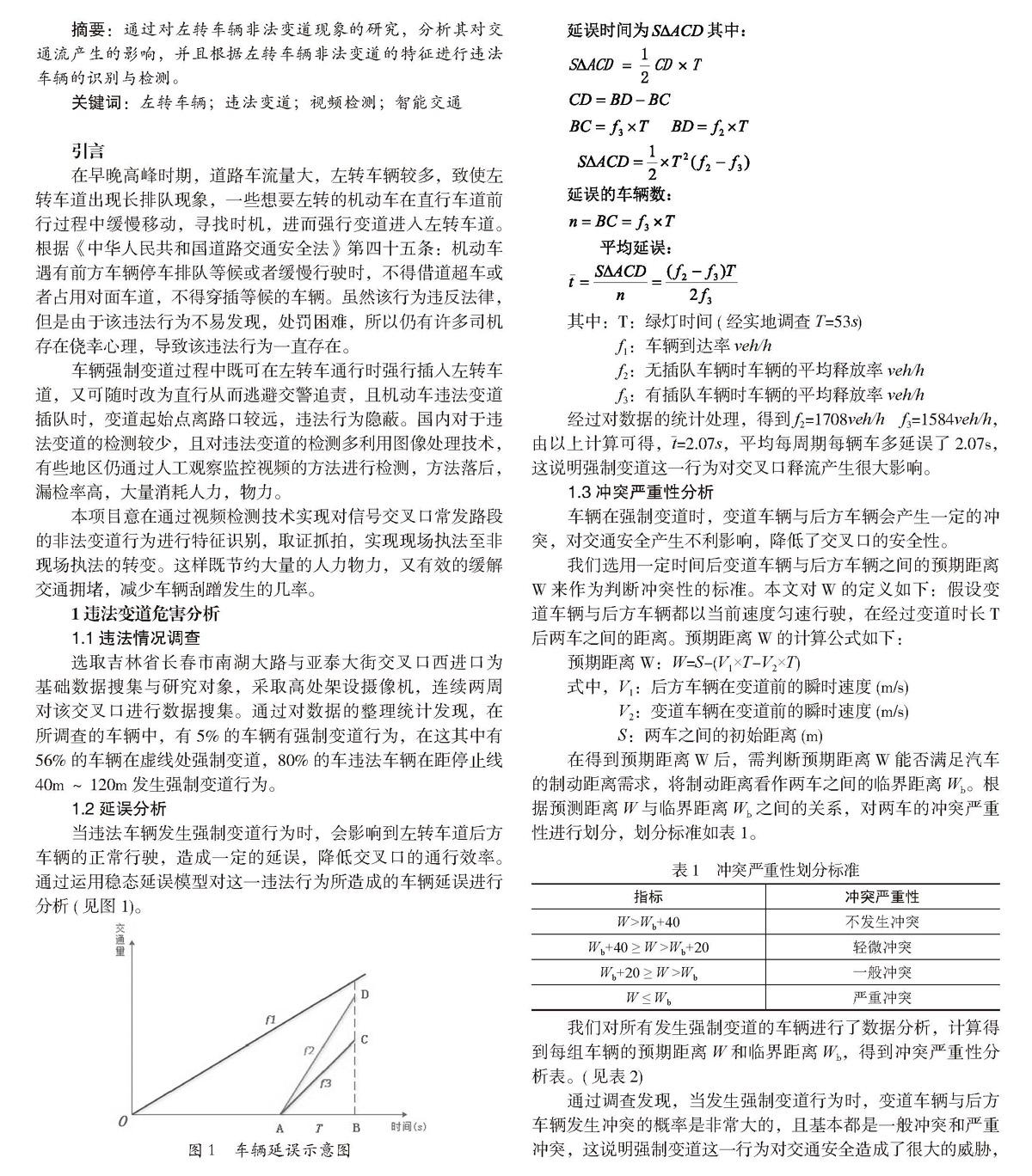
当违法车辆发生强制变道行为时,会影响到左转车道后方车辆的正常行驶,造成一定的延误,降低交叉口的通行效率。通过运用稳态延误模型对这一违法行为所造成的车辆延误进行分析(见图1)。
其中:T:绿灯时间(经实地调查T=53s)
f1:车辆到达率veh/h
f2:无插队车辆时车辆的平均释放率veh/h
f3:有插队车辆时车辆的平均释放率veh/h
经过对数据的统计处理,得到f2=1708veh/h f3=1584veh/h,由以上计算可得,t=2.07s,平均每周期每辆车多延误了2.07s,这说明强制变道这一行为对交叉口释流产生很大影响。
1.3冲突严重性分析
车辆在强制变道时,变道车辆与后方车辆会产生一定的冲突,对交通安全产生不利影响,降低了交叉口的安全性。
我们选用一定时间后变道车辆与后方车辆之间的预期距离W来作为判断冲突性的标准。本文对W的定义如下:假设变道车辆与后方车辆都以当前速度匀速行驶,在经过变道时长T后两车之间的距离。预期距离W的计算公式如下:
预期距离W:W=S-(V1×T-V2×T)
式中,V1:后方车辆在变道前的瞬时速度(m/s)
V2:变道车辆在变道前的瞬时速度(m/s)
S:两车之间的初始距离(m)
在得到预期距离W后,需判断预期距离W能否满足汽车的制动距离需求,将制动距离看作两车之间的临界距离Wb。根据预测距离W与临界距离Wb之间的关系,对两车的冲突严重性进行划分,划分标准如表1。
我们对所有发生强制变道的车辆进行了数据分析,计算得到每组车辆的预期距离W和临界距离Wb,得到冲突严重性分析表。(见表2)
通过调查发现,当发生强制变道行为时,变道车辆与后方车辆发生冲突的概率是非常大的,且基本都是一般冲突和严重冲突,这说明强制变道这一行为对交通安全造成了很大的威胁,降低了交叉口的安全性。
2违法行为判处
2.1违法行为识别流程
本文中,利用视频处理的相关技术,对车辆违法变道这一行为进行自动识别,并拍照取证,具体流程如图2所示。
2.2车辆追踪过程
由于车辆违法位置的特殊性,而且现有的抓拍装置的安放位置多在交叉口停止线处,拍摄范围有限,无法获得实验所需的视频。所以我们利用VISSIM模拟左转车辆的强制变道行为,运用MATLAB软件进行视频处理,对VISSIM仿真出的视频进行车辆追踪,并用框线对目标车辆进行标注,如图3,其中左图为原视频的车辆跟踪,右图为原视频二值化处理后得到的动态车辆追踪。(图3中,5号车辆为违法变道车辆)。
2.3违法行为判定
在视频中,我们可以获得每辆车对应每帧视频的坐标,为了判断车辆是否强制变道,本文采用以下方法:
每辆车左上角的像素坐标信息分为横坐标(bboxes(m, 1))和纵坐标(bboxes(m, 2)),设置摄像头的位置位于左转车道与相邻直行车道分界线正上方,并于逆车流方向拍摄。
以视频中两车道中线最上方为坐标原点(0, 0),向右为x轴正方向,向下为y轴正方向建立坐标系,单位长度为现实的1m,将像素坐标变换为实际坐标。我们根据以下两个条件判定车辆是否违法变道:
(1)车辆左上角横坐标与右上角横坐标的乘积小于零(表示车辆压分界线)。
(2)压线时,该车辆左后方排队车辆数达到一定阈值。
同时满足以上两个条件,该车辆发生虚线违法变道行为。
依据对实际调查数据的统计与处理,本文中我们设置的插队阈值为:左后方20米范围排队车辆大于等于2辆。
2.4违法证据生成
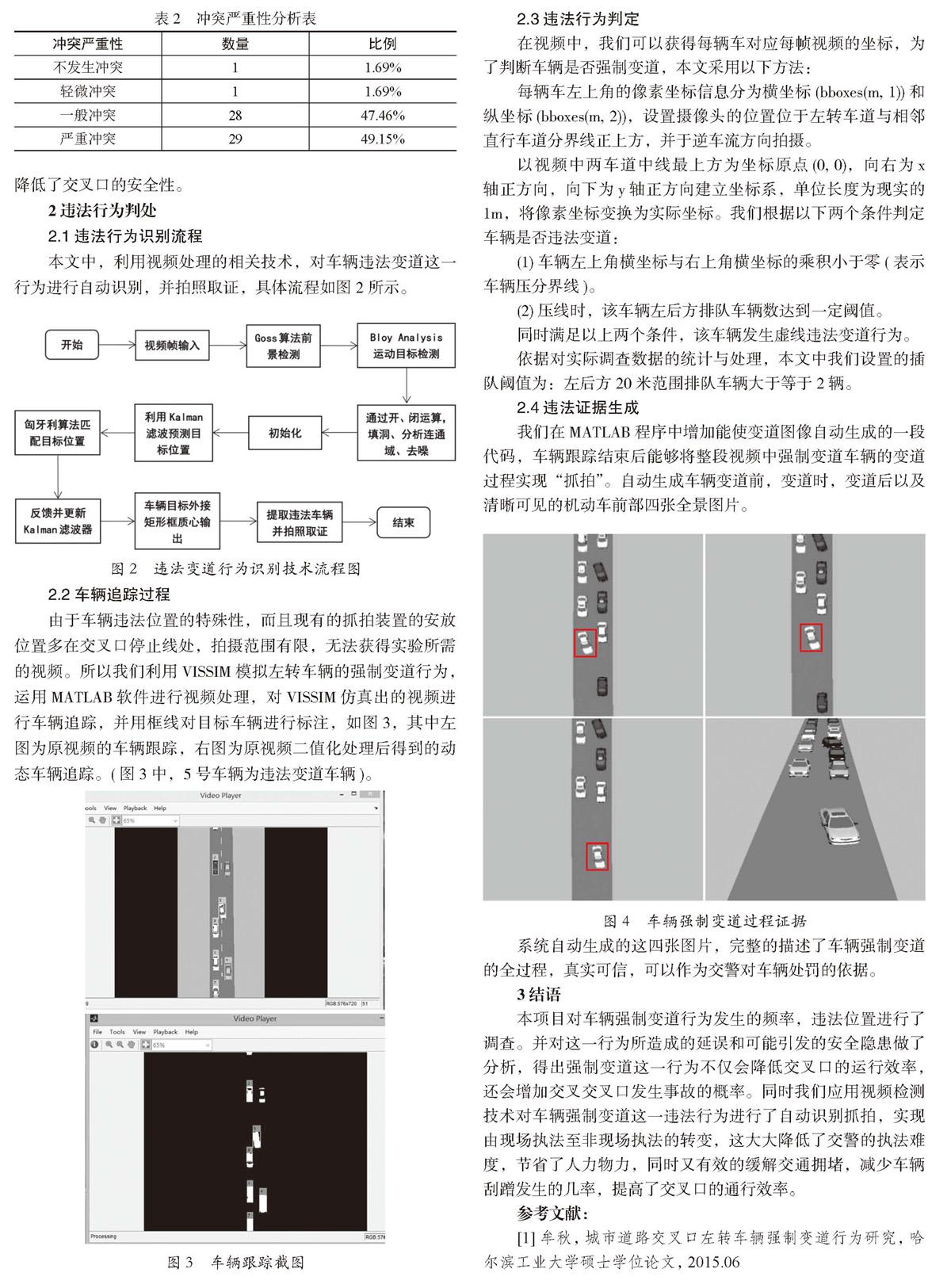
我们在MATLAB程序中增加能使变道图像自动生成的一段代码,车辆跟踪结束后能够将整段视频中强制变道车辆的变道过程实现“抓拍”。自动生成车辆变道前,变道时,变道后以及清晰可见的机动车前部四张全景图片。
系统自动生成的这四张图片,完整的描述了车辆强制变道的全过程,真实可信,可以作为交警对车辆处罚的依据。
3结语
本项目对车辆强制变道行为发生的频率,违法位置進行了调查。并对这一行为所造成的延误和可能引发的安全隐患做了分析,得出强制变道这一行为不仅会降低交叉口的运行效率,还会增加交叉交叉口发生事故的概率。同时我们应用视频检测技术对车辆强制变道这一违法行为进行了自动识别抓拍,实现由现场执法至非现场执法的转变,这大大降低了交警的执法难度,节省了人力物力,同时又有效的缓解交通拥堵,减少车辆刮蹭发生的几率,提高了交叉口的通行效率。
参考文献:
[1]牟秋,城市道路交叉口左转车辆强制变道行为研究,哈尔滨工业大学硕士学位论文,2015.06
猜你喜欢
计算机应用(2016年12期)2017-01-13
科技创新与应用(2016年34期)2016-12-23
科学与财富(2016年28期)2016-10-14
