
基站布设方案对蓝牙指纹定位精度的影响
2018-06-07 00:43杨东辉
导航定位学报 2018年2期
郭 磊,甄 杰,杨东辉
(1.中国测绘科学研究院 重点实验室,北京 100830;2.辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000)
0 引言
随着智慧位置服务[1](location based service,LBS)应用的兴起,越来越多的人致力于室内定位的研究。目前具有代表性的室内定位系统有红外线[2]、超声波[3]、射频识别[4](radio frequency identification,RFID)、超宽带[5](ultra wide band,UWB)、ZigBee以及无线保真[6](wireless fidelity,WiFi)和蓝牙(bluetooth)等,不过这些定位系统实现复杂,部署成本高;因此,采用各种方法来增强定位系统的实用性和适用性、降低部署成本,成为当前室内定位技术应用推广的关键。手机端蓝牙指纹定位是一种基于接收到的蓝牙信号强度值(received signal strength indication,RSSI)的定位方式,和以上技术相比,手机蓝牙指纹定位具有成本较低、使用方便、信号稳定且定位精度较高等优点。基站布设不仅直接影响到离线阶段建立的指纹数据库的质量,同时对最终定位精度和可靠度也有很大的影响。室内环境的复杂性使得基于RSSI的蓝牙指纹定位中基站的选取布设存在一些问题。
本文主要研究蓝牙指纹定位中指纹采样间距和基站个数对定位精度的影响,通过点位误差和定位精度给出典型环境内基站的最佳布设间隔和个数,以期对降低系统部署成本、提高指纹数据库质量和定位精度有所助益。
1 蓝牙指纹定位算法
基于位置指纹的定位方法主要分为离线定位和在线定位2个阶段,离线定位阶段建立固定区域中信号强度与空间位置关系的指纹数据库;在线定位阶段将获取到的RSSI值重新组合成新的指纹数据,通过特定匹配算法在指纹数据库中进行匹配并得出定位结果[7]。
1.1 离线阶段
在离线建库阶段,将低功耗蓝牙基站当作信号发射器在试验场中布设,将在不同采样点上采集到的来自不同基站的媒体访问控制(media access control,MAC)地址及其信号强度值RSSI作为该点的指纹数据。为了降低蓝牙信号不稳定对定位结果的影响,在建库时不仅考虑了时间的相关性,也加入了空间的相关性,即在同一位置的不同时间段进行了东、西、南、北4个朝向的采样,每个坐标都分别对应有4个方向的指纹数据,这也有助于降低在定位过程中人体朝向对蓝牙信号的遮挡影响问题。
在t1时刻,在采样点(xi,yi)处可接受到来自1号到j号蓝牙基站的信号,以向量形式表示为
F(xi,yi,t1)=(RSSI1t1,RSSI2t1,L,RSSIjt1)
(1)
指纹的最终表达形式为
(2)
1.2 在线阶段
在线定位阶段是实时数据获取并定位的阶段。进行定位时,处于任意位置的移动终端会获取基站的实时信号强度值,将获取到的信号强度值重新组合成新的指纹数据,通过匹配算法在离线阶段建立的数据库中找到最匹配的一条数据,最终得到一个与实际位置最接近的坐标作为估算的移动终端的位置。
根据指纹在数据库中表示方式的不同,基信号强度值的蓝牙位置指纹定位算法可以分为以k-近邻算法、神经网络算法为代表的确定性算法和以贝叶斯算法为代表的概率性算法2类[8]。本文中,设立的实验场景不是非常复杂,数据库中的数据不大,选用的是确定性算法中的最近邻算法。
最近邻算法是将新采集到的指纹数据与在离线训练阶段生成的数据库中的指纹数据做对比计算,选取出相似性最高的指纹数据,其对应的坐标作为该点的最终定位结果[9]。
所有的指纹数据与指定空间中的点一一对应,可将指纹数据库都表示为如下的特征向量为
(3)
式中ai(x)为第i个位置处的指纹属性。在线定位阶段将移动端实时采集到的指纹数据通过计算近似度的方法与数据库中的指纹数据进行比较,近似度d(xi,yi)为
(4)
式中:d(xi,yi)为在待定点r处采集到的指纹数据与指纹数据库中指纹数据ai(x)的近似度;(xi,yi)为指纹数据ai(x)相对应的坐标。将计算出来的d(xi,yi)升序排列,d(xi,yi)最小时的(xi,yi)作为待定点r处坐标。
1.3 蓝牙定位最佳基站布设方案的衡量指标
1)点位误差
第i个测试点的点位误差为
(5)
2)定位精度
定位精度δ是所有参与定位测试的定位点的点位误差的平均值为
(6)
式中:n为所有参与定位测试的定位点的个数;Δsi为点位误差。
3)精度可靠性
精度可靠性w是指参与定位测试的定位点的点位误差小于某一指定精度阈值的百分比为
(7)
式中:nk为参与定位测试的定位点中点位误差小于指定精度阈值的定位点个数;n为所有参与定位测试的定位点个数。
2 实验与结果分析
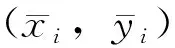
为研究基于RSSI的蓝牙指纹定位技术中基站个数对定位结果精度的影响,选取典型办公区域作为试验场进行定位实验。为使蓝牙信号达到较好效果,基站尽量布设在不受遮挡的位置,实验采用小米手机作为蓝牙信号接收器,采用自主开发的安卓手机定位APP进行数据采集、记录和匹配。试验场平面及1~7号基站分布如图1所示,图中坐标系为基于试验场本身的独立坐标系。
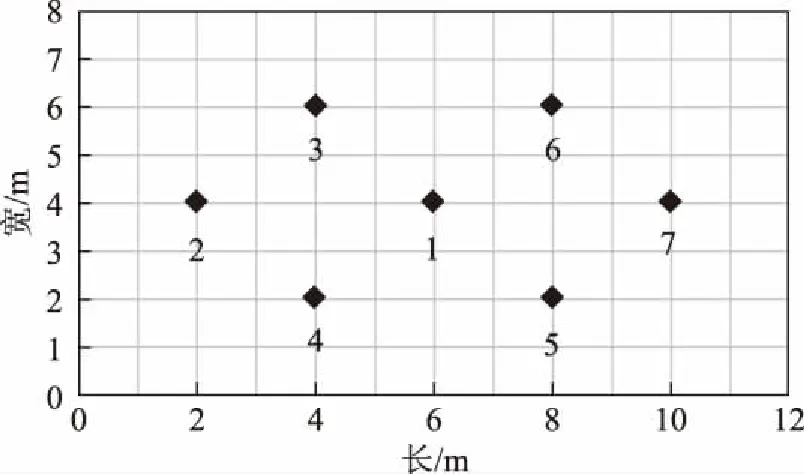
图1 实验室平面及基站分布
2.1 指纹采样间距对定位平均误差的影响
基于RSSI的蓝牙指纹定位分为离线和在线2个阶段。离线阶段是在试验区域内依据不同采样间距采集数据,建立指纹数据库,因此格网间距是1个关乎指纹数据库质量高低,进而影响最终定位精度的非常重要的因素。为保证蓝牙有效信号覆盖整个试验场,按照图1的蓝牙基站部署图,选取其中3~6号4个蓝牙基站。建立0.5、1、1.5、2和2.5 m总计5种不同采样间距的指纹数据库,采用最近邻匹配算法进行实时定位并求取相应的平均定位误差。指纹采样格网间距与平均定位误差之间的关系如图2所示。
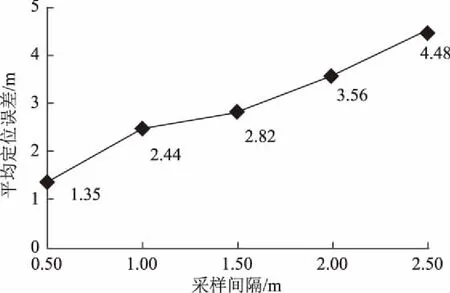
图2 指纹采样间距对平均定位误差的影响
如图2所示,定位平均误差是随着指纹采样间距的增加而增加,当采样间距为2 m时,平均定位误差为3.56 m;采样间距为2.5 m时,平均定位误差为4.48 m。可见指纹格网间距越小,定位平均误差越小。综上所述,在日常应用中选取1~1.5 m的采样间距建立指纹数据库比较合适,既能满足对定位精度的要求,又能降低建立指纹库的工作量,提高定位系统的实用性与适用性。本文试验建立指纹数据库均是基于采样间距为1 m的格网。
2.2 基站个数对平均定位误差的影响
为了研究分析在蓝牙指纹定位技术中基站个数对最终定位结果精度的影响,本文先后选取1~7个基站分别建立相应的采样格网和指纹数据库;在实时定位阶段,按照图1所示的基站分布图,依次选取不同个数的蓝牙基站并打开,按照最近邻匹配算法进行实时定位测试,并记录其定位结果,求得相应的平均定位误差。最终的平均定位误差与基站个数的关系如图3所示。

图3 基站个数对平均定位误差的影响
由图3可知,在蓝牙基站个数从1个渐增到7个的过程中,在最近邻匹配算法的计算下,测试点的定位平均误差不断降低,定位精度不断提高:当基站个数为1个和2个的时候,缺乏足够的指纹数据,定位结果很不准确;基站个数增加到3个和4个时,定位精度比1个和2个时提高很多,定位精度在1.5~2.5 m;基站个数在5个或6个时,定位精度又比3个和4个时提高很多,并趋于平稳,定位精度基本保持在了1.3 m左右;当基站个数增加到7时,与基站个数在5个或6个时的精度相比较,提升有限,而基站个数的增加又会增加布设成本,得不偿失。
2.3 走廊中基站个数对平均定位误差的影响
用于走廊实验的是一个典型的办公走廊区域,面积约为2.5 m×20 m,两侧均是厚实的墙壁。在其中建立1 m×1 m的格网进行离线阶段的数据采集,由44个指纹点组建数据库。走廊区域平面及基站分布如图4所示,图中坐标系为基于走廊本身的独立坐标系。
图4 典型走廊区域平面及基站分布
定位误差结果如表1所示。由表可知,在走廊中,当蓝牙基站个数为2,呈直线排列的时候,采用最近邻算法,其平均定位精度达到了1.08 m,最大点位误差为1.28 m,最小点位误差仅为0.8 m。
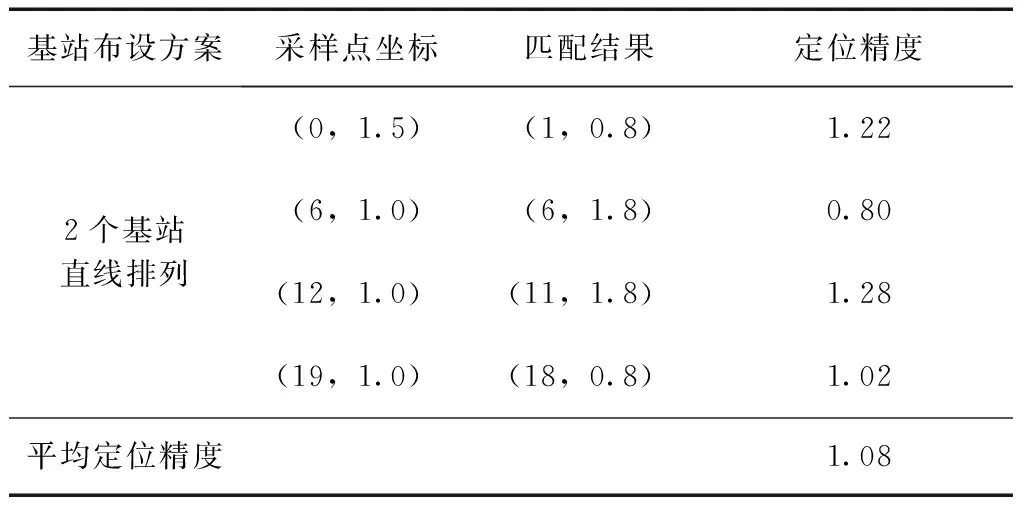
表1 典型办公走廊区域定位误差统计 m
2.4 基站个数与定位精度可靠性的关系
为了更加精确地说明接入基站个数对蓝牙指纹定位精度的影响,引入定位精度可靠性的概念。在不同基站个数时对选定的15个待定点采用最近邻算法分别进行测试,并记录其点位误差,设定1、1.5、2、2.5、3和4 m总计6个不同精度阈值,定位精度可靠性与基站个数的关系如表2所示。
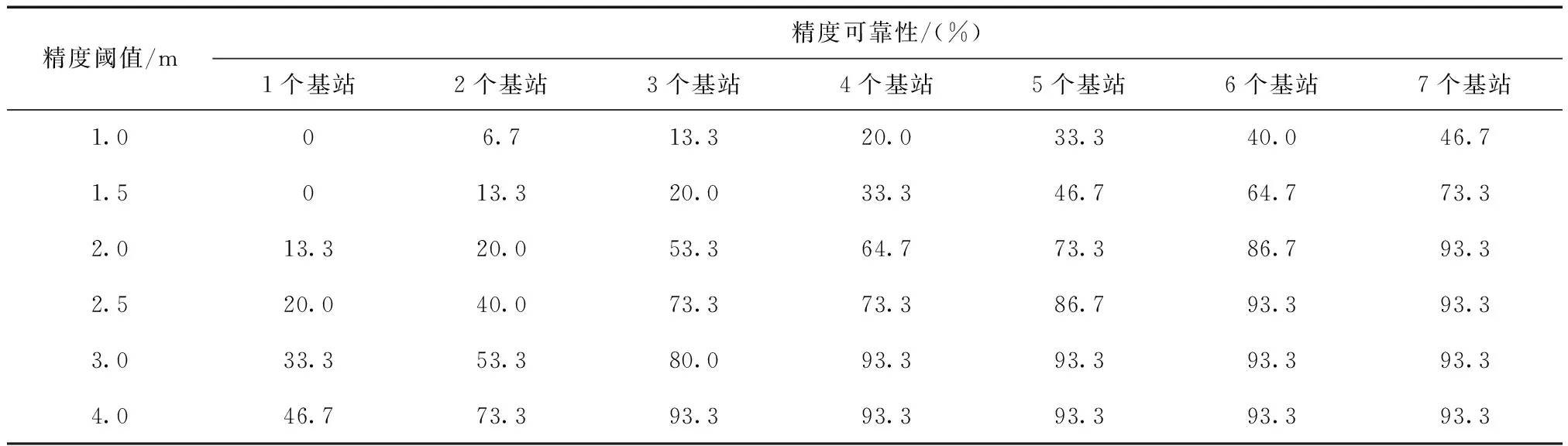
表2 不同基站个数下的精度可靠性统计
由表2可知不同基站个数k时的精度可靠性在不同精度阈值下的分布情况:相同精度阈值下的精度可靠性随着基站个数的增加呈增加趋势;精度可靠性在基站个数为4,精度阈值为3 m时就达到了最大,为93.3%;在精度阈值为2 m时,精度可靠性在基站个数为6时达到了93.3%;在误差限差为3 m时,精度可靠性在基站个数为3时就达到了80%。
基站个数在2个以下时,缺乏足够的指纹数据,很难得出准确的定位结果,定位精度和精度可靠性都很低;基站个数在6个及以上时,随着基站个数的增加,定位精度提高不明显,而且基站个数的增加会使系统的布设成本增加,还会增加离线阶段建立指纹数据库的工作量;基站个数为5~6个时平均定位精度可到达1~2 m,精度可靠性也在73.3%以上,基本可满足日常生活在大型场馆如机场、火车站、博物馆等场景中对于室内定位的需求。
3 结束语
本文研究了基于RSSI的蓝牙指纹定位技术中基站布设方案对定位精度的影响。在指定的实验环境中进行定位试验,分析测试了指纹采样间距和基站个数对定位精度的影响。实验结果表明:考虑到系统布设成本、离线建立指纹数据库的工作量等因素,当对定位精度要求比较低的时候,认为当基站个数选择3或4时最优,此时平均定位精度为2 m左右,精度可靠性可达到了80%;对定位精度要求比较高的时候,基站数量可选择为5个或6个,此时平均定位精度为1.5 m左右,精度可靠性为86.7%;在走廊环境约束下,蓝牙基站沿直线排列就可达到1 m左右的平均定位精度,且可靠性在90%以上。
[1] CHEN X H,PANG J.Protecting query privacy in location-based services[J].Geoinformatica,2014,18(1):95-133.
[2] PRIYANTHA N B,CHAKRABORTY A,BALLKRISHNAN H.The cricket location support system[EB/OL].[2017-10-18].http://www.cs.columbia.edu/~drexel/CandExam/Priyantha2000_Cricket.pdf.
[3] ZHAO J,YAO J,SU X,et al.Indoor positioning hardware system design based on RFID[J].Computer Measurement and Control,2011,19(11):2848-2850.
[4] MARON S,MGIFFORD W,ZWIN M,et al.NLOS identification and mitigation for localization based on UWB experimental data[J].IEEE Journal on Selected Areasin Communications,2010,28(7):1026-1035.
[5] LIU F,ZHANG Y,QIAN D,et al.Full tensor geomagnetic gradient reference map building and its integrated navigation algorithm[J].Acta Geodaetica Et Cartogrhica Sinica,2014,43(3):322-328.
[6] LIM J S,JANG W H,YOON G W,et al.Radio map update automation for WiFi positioning systems[J].IEEE Communications Letters,2013,17(4):693-696.
[7] PEI L,CHEN R Z,LIU B,et al.Using inquiry-based bluetooth RSSI probability distributions for Indoor positioning[J].Journal of Global Positioning Systems,2010,8(4):1-25.
[8] BRUNATO M,BATTITI R.Statistical learning theory for location fingerprinting in wireless LANs[J].Computer Networks,2005,47(6):825-845.
[9] 陈永光,李修和.基于信号强度的室内定位技术[J].电子学报,2004,32(9):1456-1458.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
电脑知识与技术(2022年15期)2022-07-02
小学生学习指导(低年级)(2021年9期)2021-10-14
导航定位学报(2021年4期)2021-08-29
防爆电机(2021年4期)2021-07-28
电脑爱好者(2020年23期)2020-12-30
小学生学习指导(低年级)(2019年9期)2019-09-25
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
