
预应力张拉电液伺服执行系统的仿真
2018-06-07 09:44罗昂昂李济顺
筑路机械与施工机械化 2018年4期
罗昂昂,马 伟,李济顺
(1.河南科技大学 机电工程学院,河南 洛阳 471003;2.河南科技大学 河南省机械设计与传动系统重点实验室,河南 洛阳 471003)
0 引 言
在桥梁建造施工中,预应力张拉是决定桥梁结构质量、安全以及桥梁使用寿命的关键步骤。在传统张拉设备基础上改进得到的半自动或全自动张拉设备已经在预应力张拉施工中得到较为广泛的应用[1-5]。由于电液比例阀与电液伺服阀所需成本较高,因此部分张拉设备选用步进电机控制节流阀,通过调整液压回路横截面积,来达到控制液压流速的效果[6-7];但阀控液压系统的液压结构较为繁杂,降低了设备在复杂施工环境下的稳定性和抗干扰能力[8-9]。
本文根据桥梁预应力张拉施工工艺和控制要求,采用泵控液压系统,提出张拉设备电液伺服执行系统的整体结构;利用Simhydraulics模块并结合Simulink逻辑控制与运算处理功能[10],完成对张拉控制系统的物理建模,并对整个张拉过程进行仿真;最后利用YSK-IA型预应力张拉控制系统平台,通过西门子S7-200PLC控制器,对该电液伺服执行系统进行张拉施工过程的控制。
1 电液伺服系统的建立
双控法是当前预应力张拉所采用的主要控制方法,它的控制对象是张拉控制应力,而千斤顶的伸长量则作为检测对象[11]。根据预应力张拉施工规范,参照现有的智能张拉控制系统结构,得到同步控制系统整体结构,如图1所示。预应力张拉控制系统整体结构可分为两大部分,即控制系统与执行系统[12]。电液伺服系统即为整体结构中的执行系统,是实现预应力同步张拉控制的基础。
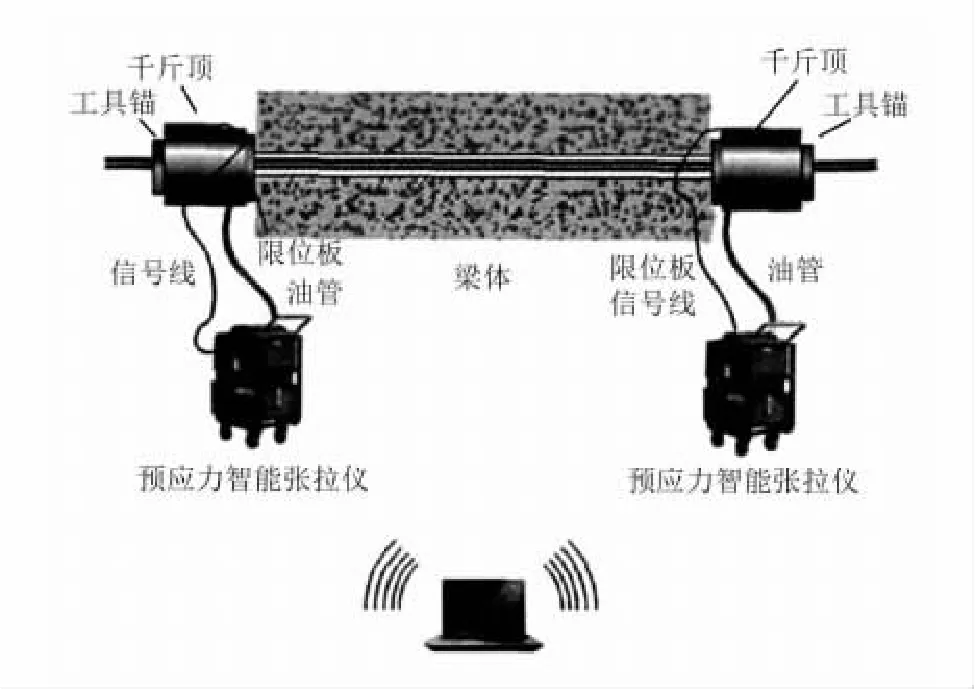
图1 预应力张拉控制系统整体结构
根据桥梁预应力张拉施工控制要求,电液伺服系统应满足以下要求[13]。
(1)系统的实际工作压力普遍较高,要满足超高压状态。
(2)施工加载过程动作要平稳,无较大冲击。
(3)系统流量与张拉速度均可调节。
(4)在加载过程中能够针对千斤顶两端张拉力的变化进行同步控制。
(5)在持荷阶段能够依照张拉力的变化对压力进行补偿。
对于采用阀控液压系统的张拉设备而言,其液压系统控制精度高、响应快,但相对复杂且发热量大;而泵控系统则结构简单、能量损失少、噪声小、发热量小、成本低、环境适应性强[14]。因此,对于预应力张拉设备而言,泵控系统比阀控系统更具发展前景[15]。本文采用变频器、交流电机与定量泵组合的方式实现对系统流量的控制,结构如图2所示。
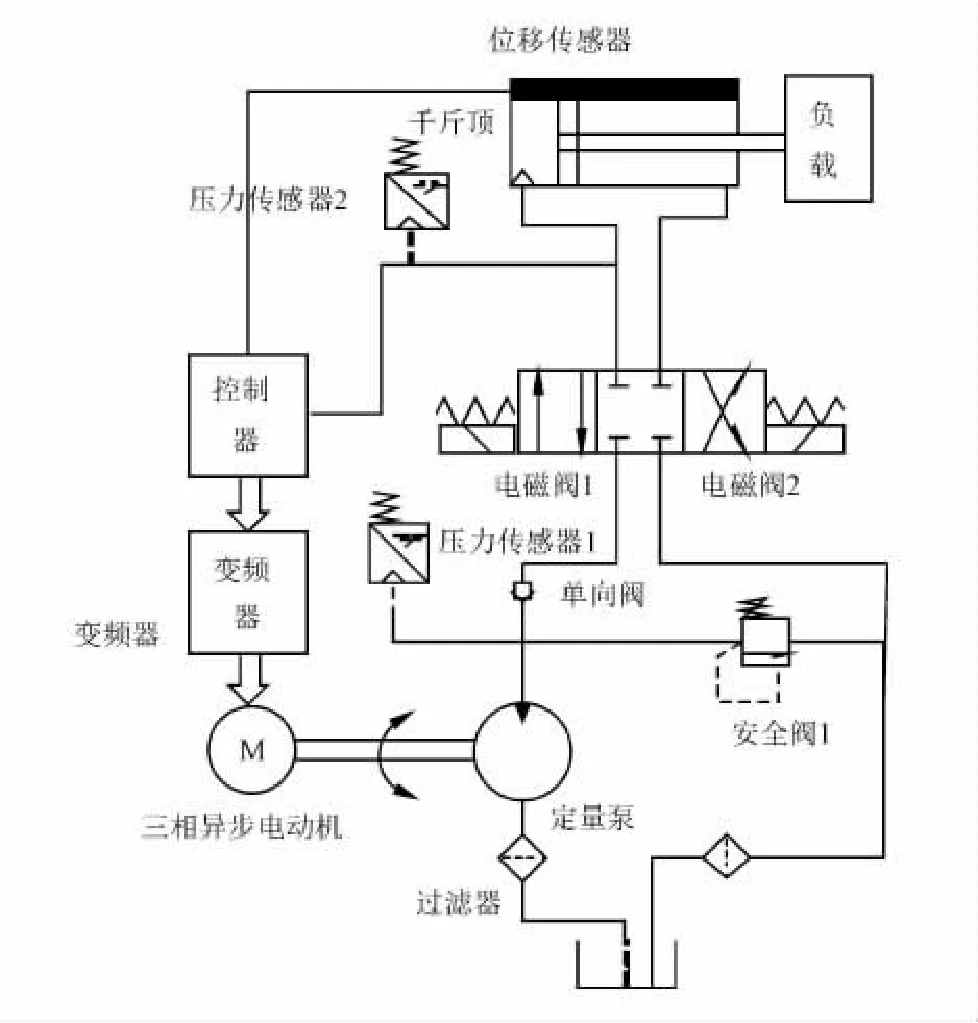
图2 液压伺服系统结构
2 预应力张拉理论数据的计算
在对预应力构件进行张拉施工时,必须以预应力张拉控制应力与千斤顶伸长量作为参照对象,从而保证构件安全可靠。本文以32m混凝土T型梁为例,采用后张法进行张拉。依照混凝土结构设计规范和梁场施工细则,每组张拉筋由9根标准预应力钢绞线组成,其标准规格见表1。
根据混凝土T型梁的设计规范,可将张拉筋的整体分为曲线段和直线段两部分。曲线段的长度为3 436mm,圆心角为7.5°,直线段长度为25 128mm。
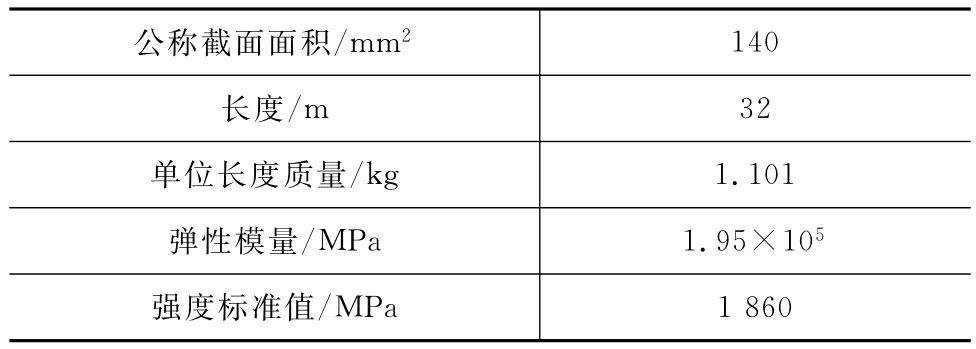
表1 钢绞线规格参数
2.1 理论张拉控制应力的计算
张拉控制应力在张拉过程中以油路压力的形式体现,张拉控制应力的取值是影响预应力构件质量的关键因素。如果取值过低,经过一段时间后混凝土构件中的预应力会有部分损失,从而造成预应力不足,无法达到较高的抗裂度与刚度的要求;而如果张拉控制应力过高,则可能导致构件的延展性变差,使某些部位出现开裂,甚至局部破坏。依照混凝土结构设计规范,张拉应力限制不应小于0.4倍的标准强度值,在本次仿真中,预应力参数为0.73。张拉筋控制应力计算公式如下[16-17]。
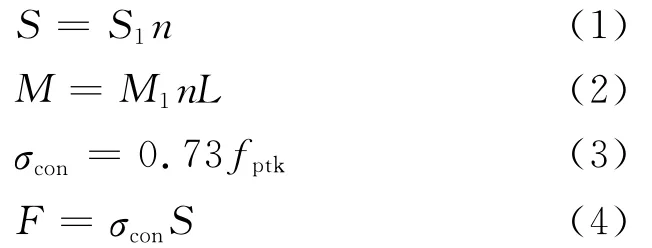
式中:S为张拉筋总截面面积(mm2);S1为钢绞线公称截面面积(mm2);n为张拉筋中钢绞线束数;M为张拉筋总质量(kg);M1为钢绞线单位长度质量(kg);L 为张拉筋总长度(m);σcon为张拉控制应力(MPa);fptk为钢绞线强度标准值(MPa);F 为张拉控制力(kN)。
由此计算得到张拉预应力为1 710.8kN,而此时最大安全控制力应为1.3倍的张拉预应力,即2 240kN。
2.2 张拉筋弹性系数与理论伸长值的计算
检验张拉施工合格与否的标准为:在张拉施工结束时,张拉筋的实际伸长值与理论伸长值的误差应为理论伸长值的±6%。因此,张拉施工前必须确定张拉筋的理论伸长值。张拉筋理论伸长值的计算公式[18-19]为


式中:ΔL为张拉筋理论伸长值(m);Fp为张拉筋平均张拉力(kN);x为张拉筋段长度(mm);Ep为张拉弹性模量(MPa);F0为张拉筋起点张拉力(kN);k为孔道偏差系数,取0.001 5;μ为张拉筋与孔道摩擦系数,取0.55;θ为曲线部分孔道弯曲角度(°)。
由于张拉筋的曲线段和直线段两部分伸长值不同,因此张拉筋理论伸长值应分两部分进行计算。由式(5)、(6)可以得到张拉筋一端的直线段和曲线段的伸长值分别为23mm和80.2mm,则张拉筋单端理论伸长值

式中:ΔLD为张拉筋单端理论伸长值;ΔLZ为张拉筋单端直线段理论伸长值;ΔLQ为张拉筋单端曲线段理论伸长值。
3 液压系统物理模型的建立
3.1 液压系统物理模型的建立与参数设置
根据图2所示的液压伺服系统结构,在MATLAB/Simulink中搭建如图3所示的仿真物理模型[20]。其中液压定量泵选取柱塞泵,表2为其技术参数。
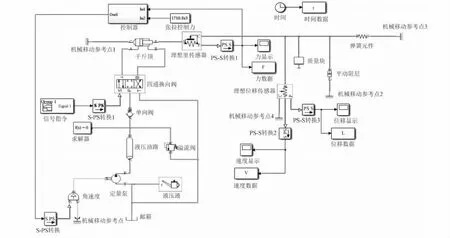
图3 液压伺服系统仿真原理
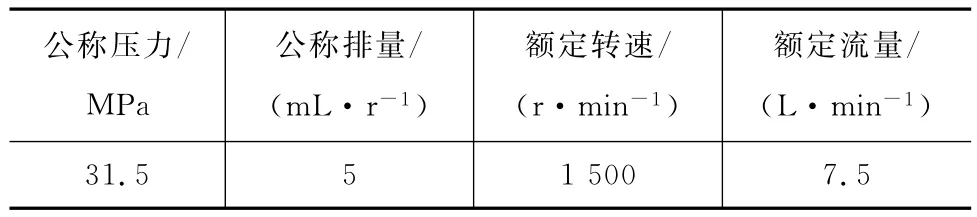
表2 柱塞泵技术参数
预应力液压千斤顶目前已基本标准化,依照相关标准选用YDC2500-200千斤顶,其技术参数如表3所示。
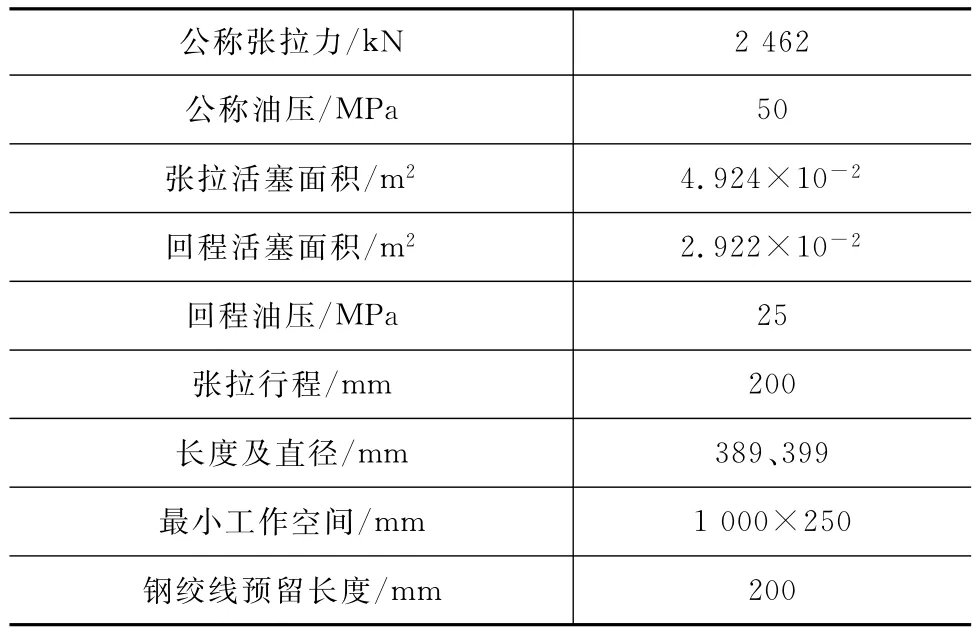
表3 YDC2500-200千斤顶技术参数
当张拉力为1 710.8kN时,千斤顶中油路压力为

式中:P为达到张拉力时千斤顶的压力(MPa);P0为千斤顶公称油压(MPa)。
液压单向阀为标准元件,其额定流量为20 L·min-1,开启压力为3bar。该系统的外部负载包括固定质量块、平动阻尼和弹簧元件。固定质量块的质量为100kg,弹簧元件则表示绞线产生弹性形变时产生的弹性力,因此设置质量块后面的弹簧弹性系数为1×108N·m-1。
3.2 控制器系统的建立
控制器是整个液压伺服系统的逻辑控制中心,它除了要接收处理反馈信号、产生变频器的输出信号外,还要控制整个张拉过程的运行与停止。预应力张拉整体过程一般为:输入张拉预应力;加载至第一级张拉力要求,通常为张拉预应力的15%;持荷5s,继续加载至第二级张拉力要求,通常为第一级的2倍,即张拉预应力的30%;再次持荷5s,然后加载至设定的张拉控制力。根据张拉过程的要求,在Simulink中建立逻辑控制系统,如图4所示。
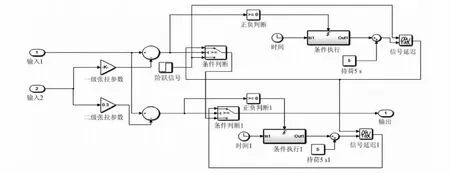
图4 控制器子系统仿真
4 仿真及结果分析
4.1 仿真
仿真时间设置为80s,步长为0.1s,运行系统进行仿真分析。仿真所需的张拉力与位移数据分别通过理想力传感器与位移传感器获得,最后通过输出显示模块(示波器)来显示仿真结果。
4.2 仿真结果与分析
通过理想力传感器得到整个张拉过程中张拉力的变化曲线,如图5所示。图6为位移传感器所采集到的整个仿真过程中千斤顶位移的变化曲线。
通过张拉力与伸长量变化曲线可以看出,伴随着张拉力不断增加,千斤顶平稳地对张拉筋进行张拉作业,二者的曲线特性相互对应,两条曲线的变化过程符合张拉过程要求。

图5 张拉力变化曲线
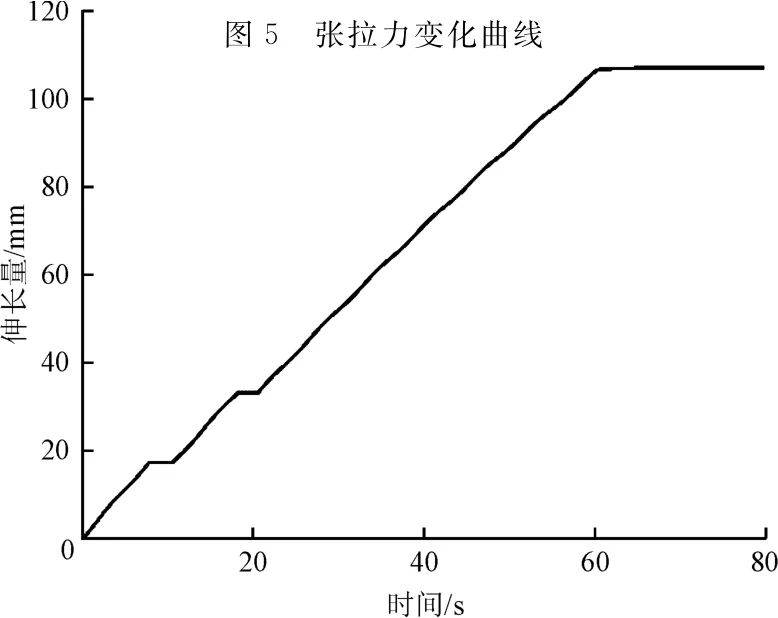
图6 千斤顶伸长量变化曲线
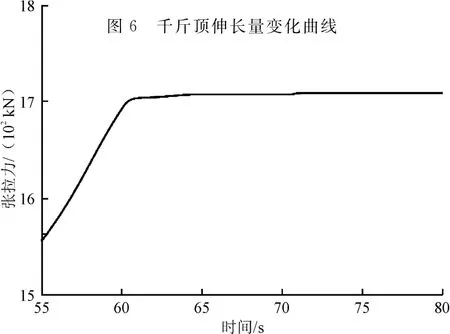
图7 张拉力变化曲线局部
当张拉施工结束,两变化曲线均达到峰值(图7、8)。从图中可以得到,系统在完成整个张拉过程时张拉控制力为1.71×106N,与理论计算值保持一致;而此时千斤顶的伸长量为106.8mm。根据预应力张拉施工规范,实际伸长量与理论伸长值的误差范围应为理论伸长值的±6%,即97~109 mm。因此,仿真结果所得到的千斤顶伸长值在允许误差范围之内,符合规范要求。
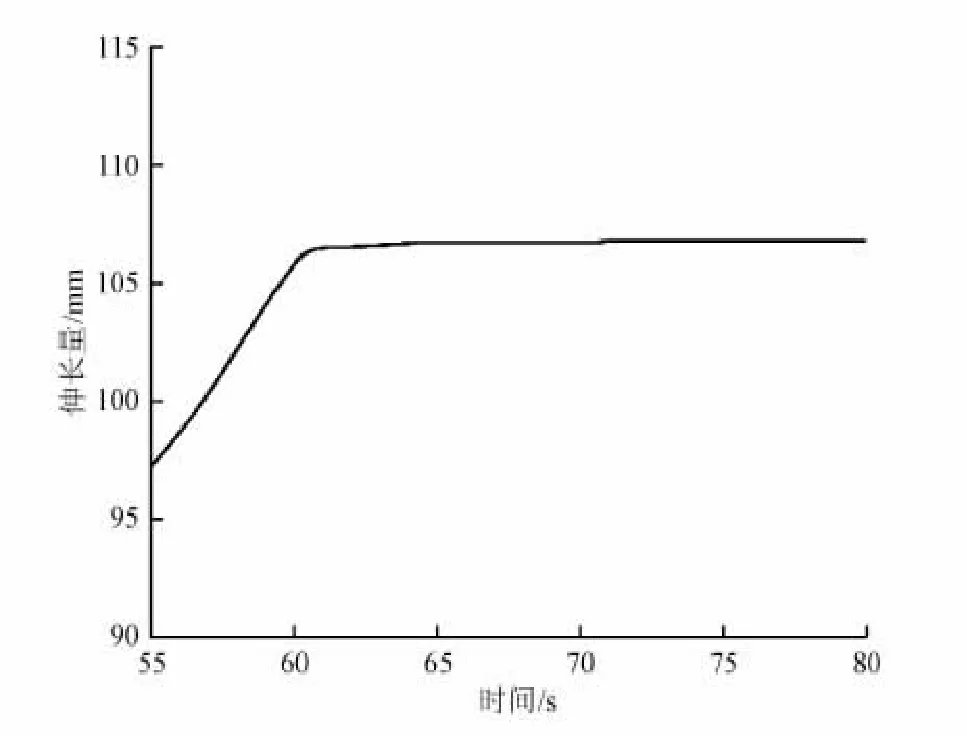
图8 千斤顶伸长量变化曲线局部
5 试验验证
在贵州安紫高速的施工梁场进行实际张拉施工操作。以YSK-IA型预应力张拉控制系统作为试验平台,通过西门子S7-200型PLC对张拉过程中的压力、位移等数据进行采集,并对张拉进程、速度、持荷时间进行控制。
最后,将收集到的过程数据进行处理,获得两端主副机的压力、位移变化曲线,如图9、10所示。由图可知,在完成张拉试验时,主、副机张拉控制压力分别为34.98MPa和35.12MPa,则该系统实际控制压力与理论压力最大差值为0.33MPa,稳态误差为0.948%。两端千斤顶最大伸长值分别为108.197mm和107.724mm,均在理论误差范围97~109mm内,张拉试验结果为合格。
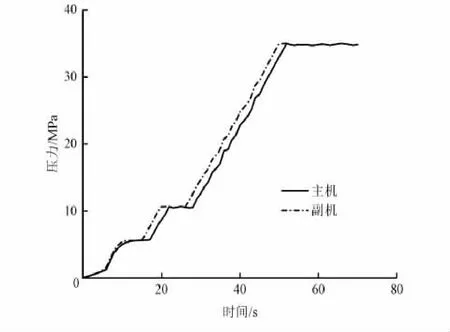
图9 主副机压力变化曲线
6 结 语
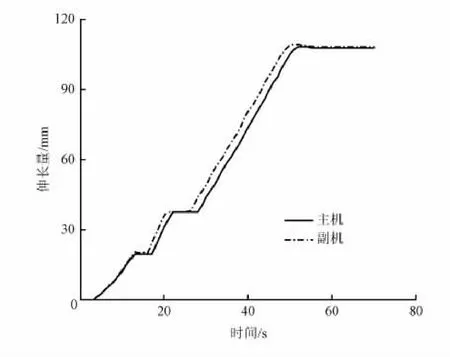
图10 主副机千斤顶伸长量变化曲线
(1)针对目前采用节流阀控液压系统的预应力张拉设备结构复杂、成本较高、施工适应性差和可靠性不足等问题,提出采用以泵控液压系统为基础的预应力张拉电液伺服执行系统。该系统整体结构简单,在复杂施工环境中有较好的适应性和稳定性,在预应力设备领域中具有较好的发展前景。
(2)利用 Simulink/Simhydraulics平台对该液压系统进行物理建模,以32m混凝土T型梁为对象模拟仿真完整的张拉过程。从仿真结果可知,该液压系统能够按照预应力控制规范进行张拉,且张拉增压过程平稳,结果准确可靠。
(3)在实际施工现场以YSK-IA型预应力张拉控制系统为平台,以实际试验梁体为对象,对该液压系统进行验证。结果证明,该液压系统用于实际施工中是可行的。
[1] 廖 强,罗 斌,饶枭宇.桥梁预应力张拉精细化施工监控系统AS-10系统的工程应用[J].公路交通技术,2011(6):72-74.
[2] 张 开.预应力智能张拉施工技术应用及控制要点[J].湖南交通科技,2013,39(4):93-96.
[3] 姜大伟,费树明,陈立岩,等.轨枕预应力张拉机设计[J].长春工业学报:自然科学版,2010,31(3):305-308.
[4] 陈海斌,张云文,秦 江.预应力混凝土智能张拉与智能压浆新工艺应用[J].内蒙古公路与运输,2012(5):3-6.
[5] 翁正飞.变频与电液比例技术复合调速系统及其应用[J].液压气动与密封,2004,5(1):21-23.
[6] KIAM N,DITRICH J.A Dynamic Models for Steam and Turbines in Power System Studies[J].IEEE Committee Report,1997,12(2):1904-1915.
[7] 章建鹏.智能预应力张拉程控系统的研究与设计[D].武汉:华中科技大学,2015.
[8] 李文峰,廖 强,罗 斌.全自动智能预应力张拉设备液压系统研究与设计[J].公路交通技术,2012(6):68-71.
[9] 姜海西.SPB-A型全自动智能张拉设备的研制[J].中国市政工程,2014(6):74-77.
[10] 郑洪波,孙友松.基于Simulink/SimHydraulics的液压系统仿真[J].锻压装备与制造技术,2010(6):31-36.
[11] 黎人伟.智能预应力施工工艺在桥梁施工中的应用[D].长沙:长沙理工大学,2014.
[12] 刘 勋,刘 玉,李新有.基于Simhydraulics软件的电液伺服系统仿真分析[J].机床与液压,2009,37(10):236-240.
[13] 何慧峰.超高压多点同步数字张拉系统研究[D].太原:太原理工大学,2012.
[14] 田士强,李孝兵,王 辉.预应力张拉数字变频自动控制方法和系统研究[J].公路交通科技,2013(10):252-256.
[15] 李文峰,游庆和,廖 强,等.变频泵控预应力张拉设备的自适应模糊PID张拉控制[J].液压与气动,2016(11):48-54
[16] 齐春光,张国良.张拉控制应力施工取值问题探讨[J].科技信息,2009(1):266,323
[17] 梁浩杰,苏 玲,祁 帅.后张法预应力筋张拉过程中张拉应力与伸长值的控制[J].内蒙古公路与运输,2003(S1):11-12.
[18] 李式雄.后张法预应力钢绞线张拉和锚固过程分析[J].筑路机械和施工机械化,2015,32(2):69-72,77.
[19] 翟寄文.全自动预应力张拉控制系统设计[D].合肥:安徽大学,2009.
[20] 任建华,谢 建,李 良.基于Simulink/SimHydraulics的阀控二级液压缸系统的建模与仿真[J].机床与液压,2012,40(23):155-157.
猜你喜欢
山西建筑(2022年14期)2022-07-18
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
航空发动机(2020年3期)2020-07-24
石家庄铁路职业技术学院学报(2018年1期)2018-05-09
时代英语·高二(2017年4期)2017-08-11
天津体育学院学报(2016年3期)2016-12-18
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
专用汽车(2016年4期)2016-03-01
