螺旋升运式谷物产量传感器试验研究
2018-06-06 08:01黄操军刘金明韩东来
农机化研究 2018年5期
赵 晨,黄操军,刘金明,韩东来
(1.黑龙江八一农垦大学 信息技术学院,黑龙江 大庆 163319;2.黑龙江省八五九农场,黑龙江 佳木斯 156326)
0 引言
自动化的谷物产量测量是实行精准农业收获阶段的重要组成部分,且产量的高低同样能够集中体现谷物的生长和管理状况,而收获机械的实时产量的测量一直是农业生产中的难点。所以,获取准确的产量空间分布信息是实施精准农业的关键[1]。国内外许多研究学者提出了许多产量监测方法和谷物产量模型,但测产的精度及模型的通用性及实用性由于受到各种各样因素的影响,目前还不能完全适用于生产和农户应用。在国外,一些知名公司(如Ag Leader、Micro Track、CASE IH)的收获机上都装有自行研制的测产系统。周俊、胡均万、陈树人等[2-4]设计了一种以平行梁结构的冲量式谷物流量传感器作为测产核心的产量监测系统,并在其后进行了改进研究。虽然冲量式传感器价格低廉、安装方便;但测量谷物产量时,受机车、升运器振动及机车倾斜角度影响较为严重,测产误差也较高。马朝兴、付兴兰[5-6]提出采用光反射原理的传感器进行谷物层厚度测量,同时通过谷物容重和输送速度来进行测产;其缺点在于传感器容易受到谷物厚度影响,且升运形式为刮板式,传感器在升运器底部进行测量,而到达顶端时由于机身抖动,一部分谷物则会落回粮仓内,致使测量精度降低。张小超等[7]设计了称重式谷物流量传感器,对产量信号进行处理以后,达到一定的测产要求,但同样容易受到机车振动的影响。
上述所介绍的谷物测产方法研究一定程度上能够满足生产要求,但仍然不尽如人意。通用的局限性、设备安装的繁琐程度及谷物流量传感器的设计成本,约束了各类测产监测系统在实际应用中的发展[8]。为此,本文对筒腔内的谷物进行了一般动力学和稳定输送情况下的动力学分析,建立了一套根据输送电机参数计算谷物产量的研究方法。同时,设计出一种基于螺旋输送机的谷物测产监测系统,通过采集电机的电压、电流及转速等实时参数计算输送谷物的瞬时质量。
1 总体设计
本文旨在研究和设计谷物产量实时监测系统,整体硬件系统如图1所示。该系统由下位机和上位机共同完成:下位机部分与螺旋输送机一起工作,通过设置PWM的占空比调节传动电机进行了闭环调速,能够对系统传动电机的电流、转速信息进行实时采集,并通过OLED液晶屏显示,设计了一组人机交互按键,操作简单、清晰明了;上位机部分由PC机和无线接收模块组成。传动电机的相关参数经过MCU处理后,通过无线通信模块发送给上位机,串口助手对数据进行存储,并对传输数据进行分析。
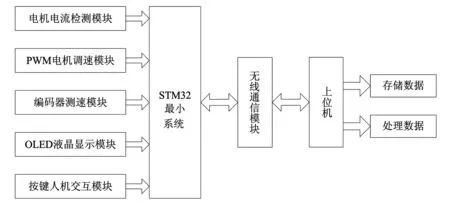
图1 硬件系统框图Fig.1 The block diagram of hardware system
2 谷物在螺旋升运器中的动力学分析
2.1 谷物在绞龙输送过程中的一般动力学分析
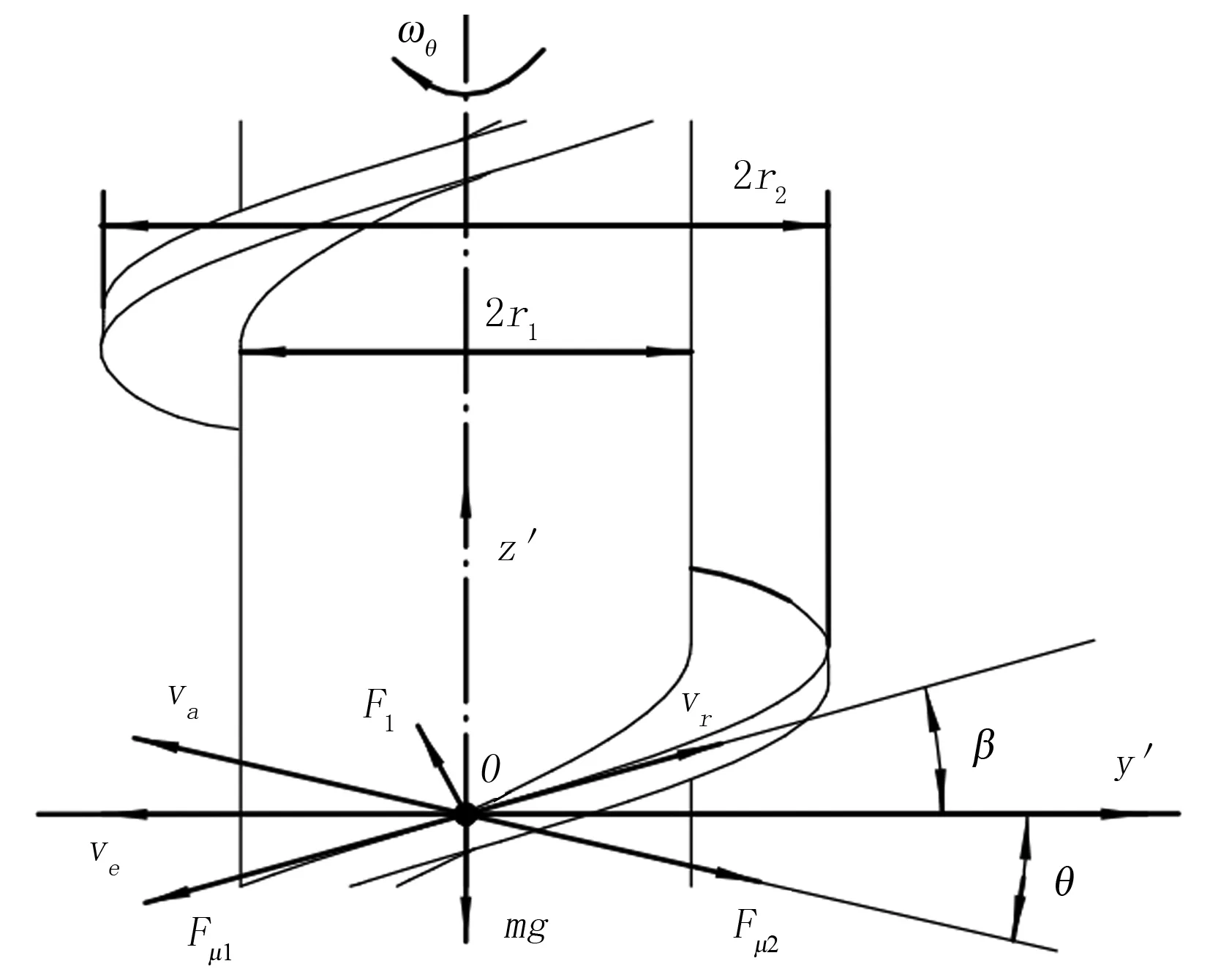
设绞龙螺旋的中轴直径为2r1,叶片外径为2r2,螺距为l。以距离叶片中轴线距离为r的谷物颗粒m为分析对象,绞龙转轴的旋转运动为牵引运动,m相对于螺旋的运动为相对运动,建立了ox′y′z′作为运动参考坐标系对谷物m进行动力学分析,如图 2所示[9]。
(a) 沿-x′轴方向

(b) 沿-y′轴方向图2 谷物颗粒m的动力学分析Fig.2 The kinetic analysis of cereal grain m
假设谷物与叶片之间的动、 静摩擦因数相同,图2中的各个物理量的意义如下:mg为重力;μ1为谷物颗粒与绞龙叶片之间的摩擦因数;μ2为谷物颗粒的内摩擦因数;F1为绞龙叶片的法向力;Fμ1为叶片的切向摩擦力;F2为外侧物料的径向支撑力;Fμ2为外侧谷物的切向摩擦力;g(r)为绞龙的转速;Ve为颗粒在m点处的牵引运动线速度;vr为相对运动的线速度;va为谷物颗粒m的绝对线速度;Fge为牵引惯性力;FgC为科氏惯性力;β为绞龙叶片的升角;θ为谷物颗粒绝对运动的升角。
2.2 绞龙在稳定输送过程中的动力学分析
对谷物颗粒沿着钻杆稳定输送状态下进行分析。在绞龙输送过程中,紧贴旋转叶片的谷物由于惯性不会脱离叶片,其与叶片的相对运动为沿着叶片的螺旋线向上运动,绝对运动为螺旋上升运动[10]。与临界状态相比,物料的动力学变化还有:①科氏加速度、科氏惯性力值不为 0;②筒壁对物料的摩擦力改向,与物料的绝对运动速度方向相反。若将物料螺旋运动分解为绕钻杆轴线的转动和沿钻杆轴线的直线运动,则其转速和轴向直线运动速度的值均稳定不变。稳定输送时物料颗粒m的各力的方向情况为:mg为z′轴负向;F1为叶片法向;Fμ1=μ1F1为相对速度的反向;F2为x′轴负向;Fμ2=μ2F2为与谷物颗粒m运动方向相反;Fge为x′轴正向;FgC=2mrωeωr为x′轴负向。
将加速度投影到x′、y′、z′轴上,有
(1)
(2)
(3)
将ωr表示为谷物颗粒与螺旋叶片的相对转速,则谷物颗粒的绝对转速为:ωa=ωe-ωr。谷物颗粒绝对速度va沿圆周方向的分量和沿轴向的分量大小为
va-y=r·ωa=r(ωe-ωr)
(4)
(5)
谷物相对于螺旋叶片做稳定运动时,3个轴方向的相对加速度分量大小为
ar-x′=mrωr2
(6)
ar-y′=ar-z′=0
(7)
将式(1)至式(7)合并,有
用叶片螺旋升角的三角函数以半径和螺距代替,综上可得,绝对角速度与牵引角速度满足以下关系,即
=9.8
(8)
当螺旋绞龙的参数及谷物颗粒性质确定时,式(8)可表示为
f(ωe,ωa,r)=
(9)
式(9)是对谷物在单头螺旋稳定输送状态下进行相对运动动力学分析得到的结果,表达了谷物颗粒的绝对转速与螺旋转速及物料颗粒距离轴心距离r之间的数学关系[11]。当螺旋的转速ωe确定时,谷物颗粒dm沿轴向运动的线速度是r的函数,以g(r)表示。
绞龙输送的截面示意图如图3所示。输送是一个连续不断的过程,距离轴线r处的所有谷物颗粒的运动参数一致,即图2中微小宽度dr的环形区域内谷物的速度大小相同。对于轴心半径为r1、螺旋外径为r2的螺旋,则单位时间下整个螺旋输送截面区域内输送的谷物体积为
(10)
其中,g(r)为谷物轴向速度与距轴心之间距离r的函数;r1为螺旋中心转轴半径;r2为螺旋叶片外径。
式(10)反映了单位时间内截面区域内的输送的谷物体积,若谷物收获时的含水率已知(即谷物密度ρ已知),则单位时间内的截面区域的谷物质量△m可得,由此推算出绞龙在输送谷物时的做功,即
(11)
其中,M为螺旋升运器单位时间内输送的总质量;Vi为单位时间内螺旋截面的输送体积;s为螺旋升运器的螺距;N为螺旋输送器中的螺距个数;mi为单位时间下螺旋输送截面区域内输送的谷物质量;g为重力加速度;l为绞龙输送的长度;θ为输送绞龙与水平面的夹角;U为绞龙输送电机的电压;Ii为单位时间绞龙输送电机的瞬时电流;t为绞龙输送过程中做功的单位时间,分为n份。
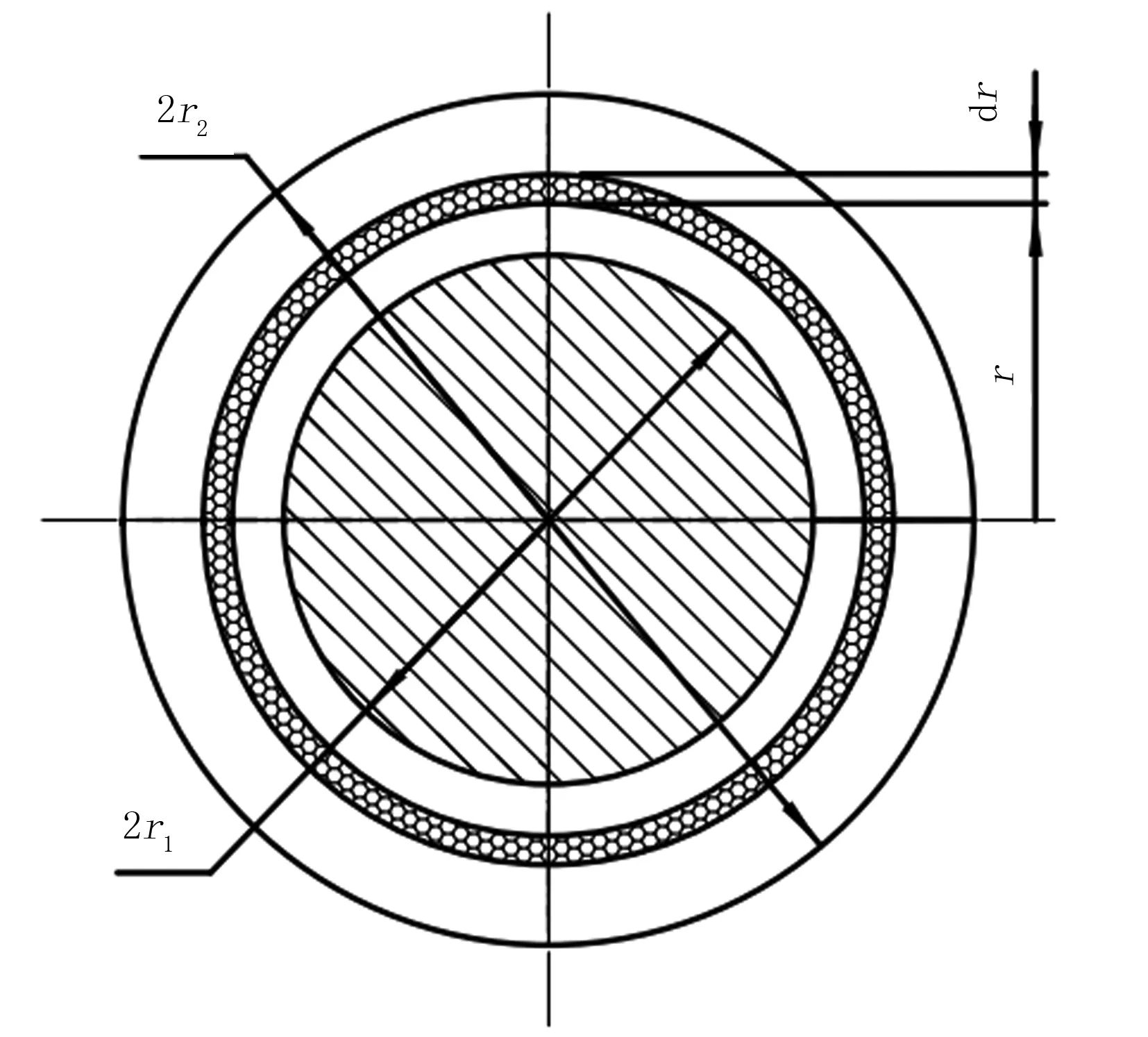
图3 绞龙输送的截面图Fig.3 The sectional drawing of auger transmission
3 硬件设计
3.1 电机驱动电路及电流监测模块
图4中,U4为线性光耦,PWM为低电平有效。由于MCU的IO口直接驱动MOSFET容易烧毁单片机,光耦导通后MOSFET的栅极和源极电压达到MOSFET的导通条件,MOSFET的漏极和源极导通,电机导通。
电源监测模块采用集成WHB20LSP5S2H型霍尔效应原理-闭环电流传感器;WHB20LSP5S2H能在电隔离条件下测量直流、交流、脉冲,以及各种不规则波形的电流;单电源工作时由+5V DC供电,其具有高精度,良好的线性与响应时间、低功耗、良好的过载能力,以及很高的稳定性与极佳的抗干扰能力等优良特性。绞龙电机中电流流经WHB20LSP5S2,模块输出电压信号经过RC滤波后送入单片机ADC进行计算,如图4所示。
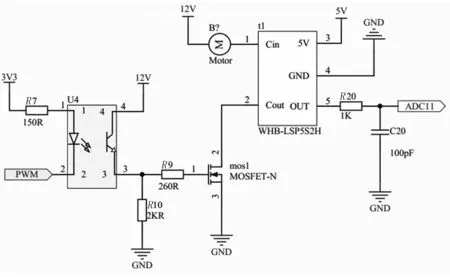
图4 电机驱动电路及电流监测模块Fig.4 The circuit of motor drive and current monitoring module
3.2 串口通信模块
为了更精准地采集绞龙电机的电流及转速情况,本设计设置了每100ms采集一次数据。由于设置采集间隔时间较短, 无法通过肉眼在液晶显示屏上进行读取,所以需要通过串口通信进行上传和存储数据[11]。串口与电脑USB通过虚拟串口芯片CH340通信,在串口模式下,CH340 提供常用的MODEM联络信号,用于为计算机扩展异步串口,或者将普通的串口设备直接升级到USB 总线。本文同时也设计无线通信通过MCU的RXD和TXD进行无线透传,主要电路如图5所示。
3.3 人机交互模块
为了更好地显示和设置螺旋升运器的转速和电流状态,设计了人机交互模块(见图6)来设置螺旋升运直流电机PWM百分比。按键IO设置为低电平触发,IO模式为上拉输入模式;OK按键设置为中断触发模式,只有按下OK按键时,进入设置模式,循环扫描其他按键输入,进入人机设置界面。其中,KEY_0和KEY_1是OLED显示屏上左右扫描按键,KEY_2和KEY_4是上下加减按键,KEY_5是设置OK按键,KEY_3是设置Cancel按键[12]。
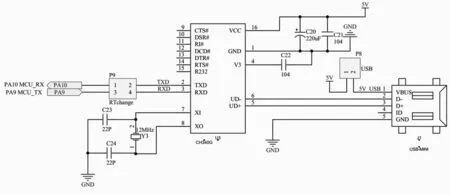
图5 串口通信模块Fig.5 The serial communication module
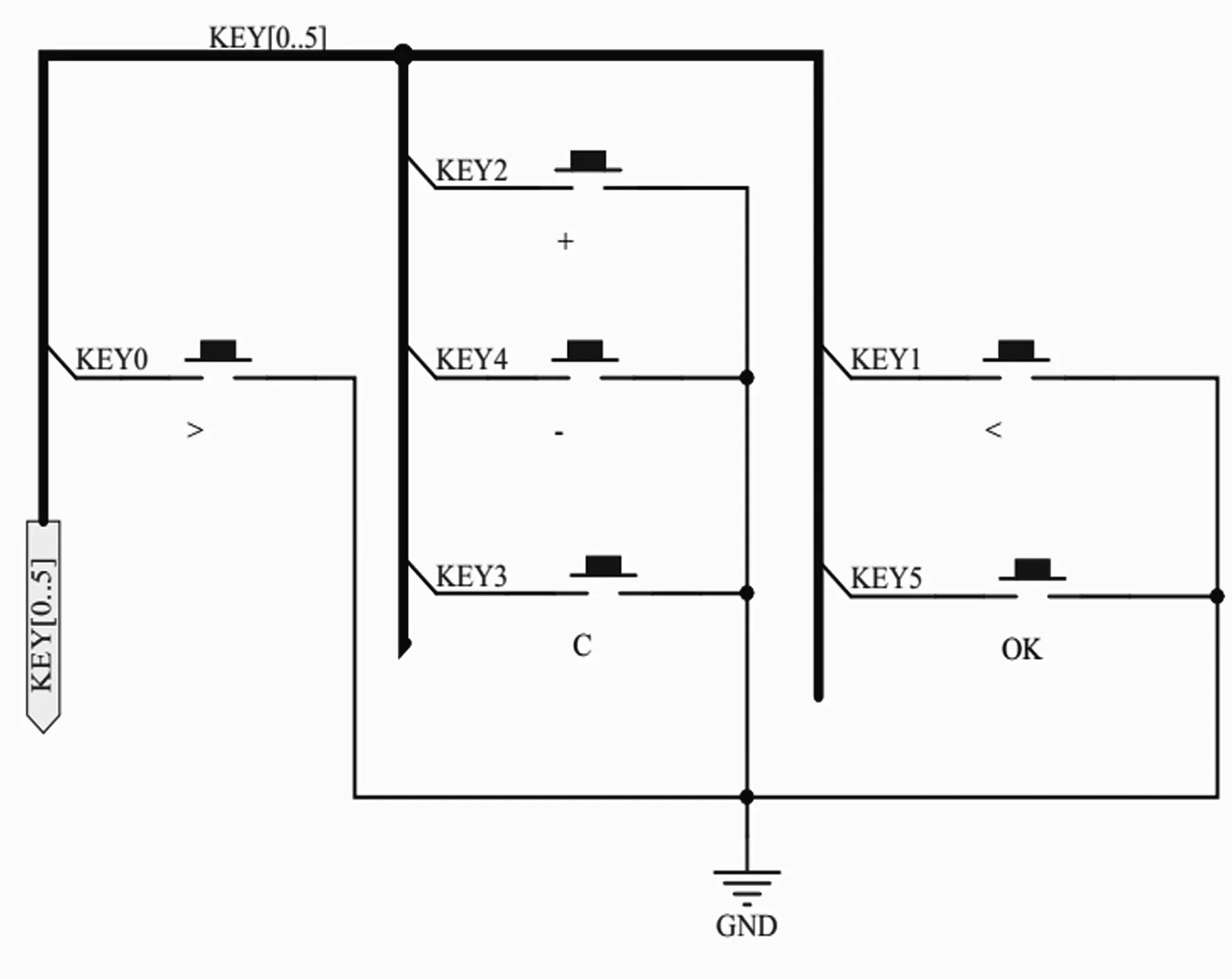
图6 人机交互模块Fig.6 The human computer interaction module
4 整体设计工作流程
本设计工作流程图如图7所示。上位机由PC端的串口助手和无线接收装置组成,连接通信设备;设置串口波特率为115 200bps后,打开串口,上位机设置完成等待接收数据。下位机的产量采集器设置螺旋升运电机PWM百分比,以达到预设转速。在升运器腔体中谷物质量发生改变而引起的转速变化时,系统能够进行闭环调节。当上位机和下位机都设置成功后,系统正常运转并对升运电机的电流、转速进行采集,通过无线模块上传到PC端进行计算,在下位机的OLED显示屏和上位机的屏幕上显示实时产量,在测量结束后显示收获总产量。

图7 系统工作流程图Fig.7 Working flow chart of the system
5 试验与结论
5.1 谷物流量传感器装置
对于本研究涉及的谷物流量传感器,需要通过试验的验证和理论的分析共同完成,因此设计了一种基于螺旋升运原理的谷物流量传感器室内试验台,结构如图8所示。该试验台主要由谷物螺旋升运器(绞龙)、螺旋输送腔体、底座、入粮口、出粮口、直流电机和编码器等组成。
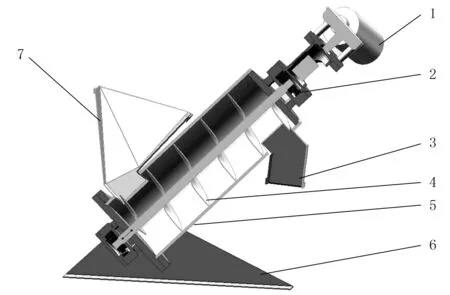
1.螺旋升运电机 2.螺旋输送绞龙 3.出粮口 4.螺旋叶片 5.螺旋输送腔体 6.底座 7.入粮口图8 实验台整体结构图Fig.8 The overall structure of the experimental platform
试验台以电机带动螺旋升运器为谷物提升提供动力。驱动电机选用12V直流电机,额定转速为130r/min,功率为80W。螺旋升运器提升长度为500mm,螺距为100mm,螺旋叶片直径为100mm,钻杆直径22mm,底座升运角可调范围为45°~90°。
5.2 谷物流量传感器的静态试验
为了验证该谷物产量传感器的应用性,本文以玉米颗粒为研究对象进行了试验。根据试验需要,提前准备0~2kg的玉米进行试验标定。每份玉米在进行实验时,做5组并分别采集各组样品数据,取其平均值通过串口上传至上位机进行保存。谷物产量传感器静态拟合关系如图9所示。
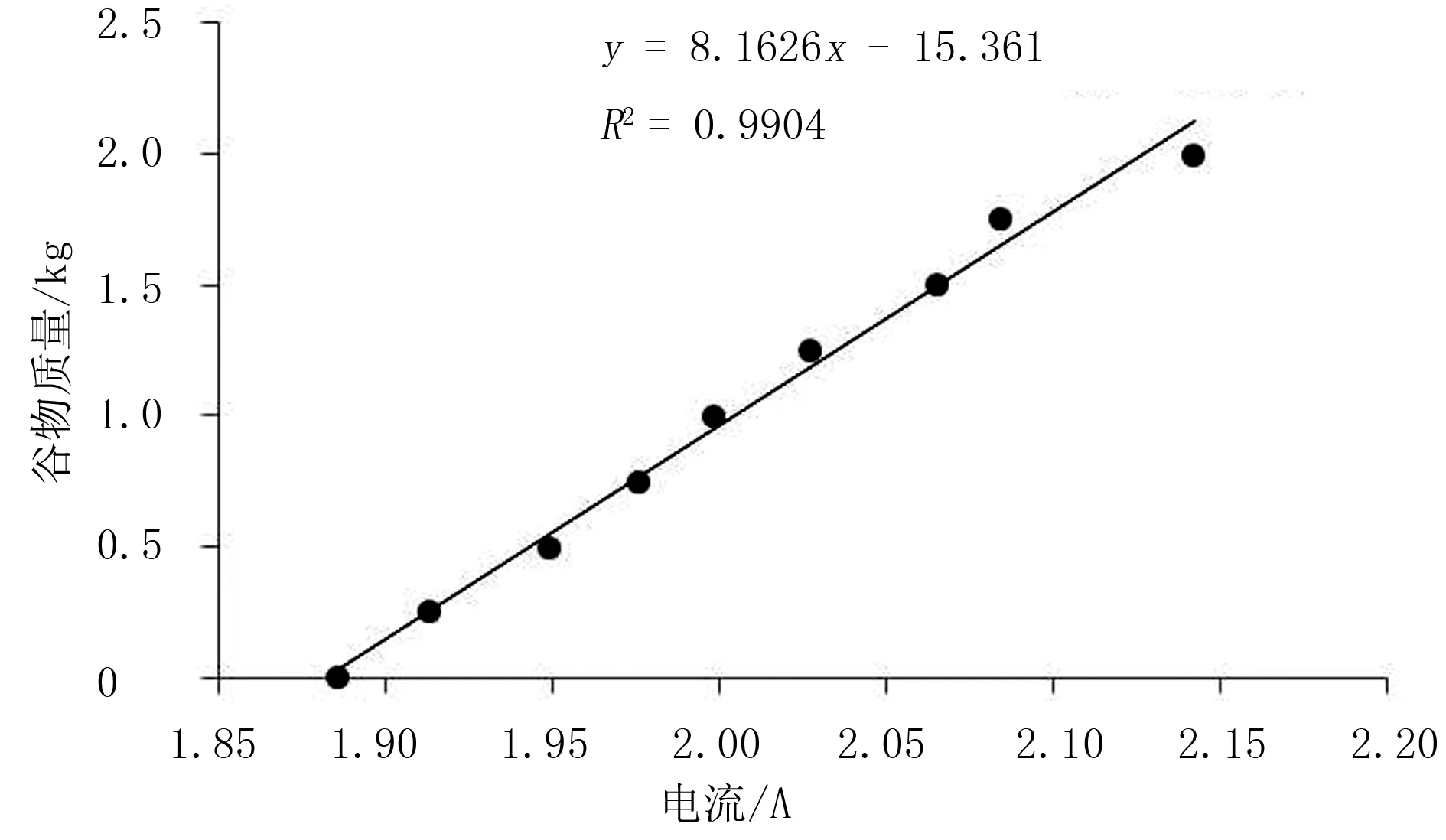
图9 谷物产量传感器静态拟合关系图Fig.9 The static fitting relation diagram of grain yield sensor
5.3 室内试验
将事先准备好的一定质量的谷物倒进入粮口,接通电源,运转试验台和谷物产量采集系统,完成一次谷物填充,减少填充时间误差 。把喂入量设定为≤0.5、≤1.0、≤1.5和≤2.0kg/s进行试验,如此进行4组并采集数据进行分析[13-14],结果如表1所示。

表1 谷物测产实验台试验数据
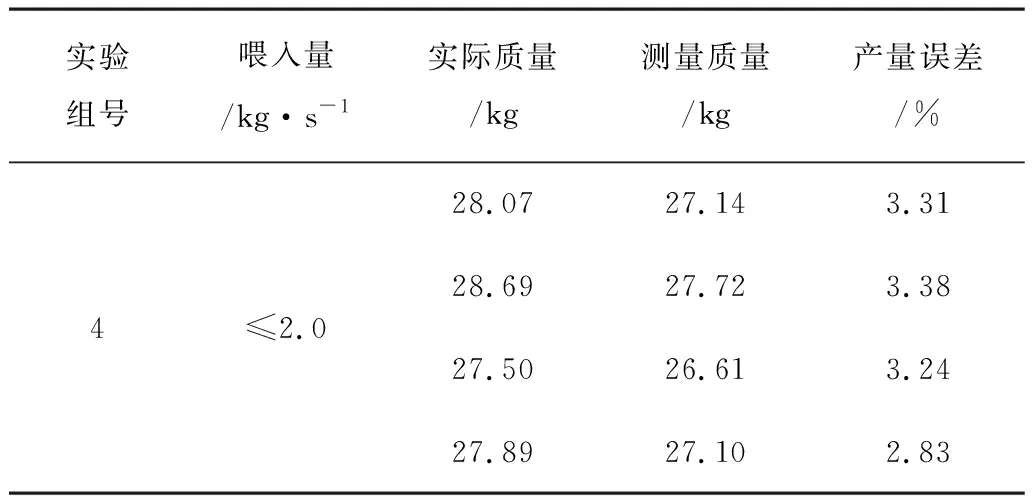
续表1
由于谷物在经过螺旋升运器之后,在腔体中仍有残余,导致测量质量比实际质量普遍偏小。室内试验数据表明,该谷物产量试验台误差≤3.56%,属可接受范围。
6 结论
1)对螺旋升运器在静止和稳定输送过程中的谷物进行了动力学分析,提出了一种通过检测螺旋升运输送电机参数估算谷物产量的方法。
2)对动力学分析后的谷物螺旋升运器量身设计了一套谷物产量监测系统,分为下位机和上位机监测部分,对螺旋升运器在输送谷物过程中的各个参数进行了采集、上传和存储。
3)通过试验对本谷物产量传感器参数进行了标定,之后利用多组试验验证了该传感器的可行性,在喂入量为0~2kg/s时,平均误差3.11%,达到了测产要求。
参考文献:
[1] 罗锡文,廖娟,胡炼,等.提高农业机械化水平促进农业可持续发展[J].农业工程学报,2016,32(1) :1-11.
[2] 周俊,苗玉彬,张凤传.平行梁冲量式谷物质量流量传感器田间实验[J].农业机械学报,2006,37(6): 102-105.
[3] 胡均万,罗锡文,阮欢.双板差分冲量式谷物流量传感器设计[J].农业机械学报, 2009,40(4): 69-72.
[4] 陈树人,李耀明,张西良.谷物联合收割机测产系统研究现状与展望[J].农业机械, 2008(8): 62-63.
[5] 马朝兴,李耀明,徐立章.联合收割机谷物流量传感器的现状与分折[J].农机化研究,2008,30(7):74-76.
[6] 付兴兰,张兆国,安晓飞.光电漫反射式联合收割机谷物产量计量系统研发与性能试验[J].农业工程学报,2017,33(3):24-30.
[7] 张小超,胡小安,张爱国.基于称重法的联合收获机测产方法[J].农业工程学报,2010,26(3):125-129.
[8] P R M B,R H.A review of combine sensors for precision farming[J]. Precision Agriculture,2002,3(2):385-392.
[9] 林愉,张晓东,雷萍.圆管浆体螺旋流中颗粒的运动分析和仿真[J]. 矿山机械, 2012,40(12): 50-53.
[10] 赵满全.物料颗粒在立式螺旋输送机中的运动分析[J].内蒙古农牧学院学报,1992,13(3): 77-84.
[11] 丁应生,佘开海.螺旋面斜向扭转振动的传动和物料运动分析[J].武汉工业学院学报, 2001,20(3): 55-57.
[12] A A M,C T S.Verification of yield monitor performance for on-the-go measurement of yield with an in-board electronic scale[J].Journal of Electronic Packaging, 2000,4(43): 801-807.
[13] 仇华铮,陈树人,张林林.谷物产量智能测产监测器的设计与试验[J],农机化研究,2013,35(2):130-133.
[14] 李新成.谷物联合收割机远程测产系统开发及降噪试验[J].农业工程学报, 2014,30(2): 1-8.
猜你喜欢
今日农业(2022年13期)2022-09-15
今日农业(2021年12期)2021-11-28
今日农业(2021年17期)2021-11-26
气象水文海洋仪器(2021年3期)2021-10-15
今日农业(2021年9期)2021-07-28
装备制造技术(2020年11期)2021-01-26
军事文摘(2020年20期)2020-11-16
四川蚕业(2020年3期)2020-07-16
现代计算机(2020年3期)2020-03-05
作文与考试·初中版(2018年23期)2018-09-10