
基于机载点云数据的智能化成图方法研究
2018-06-05 12:12胡晓斌
地理空间信息 2018年5期
胡晓斌
(1.武汉大学 测绘学院,湖北 武汉 430079)
近年来,机载LiDAR技术得到了蓬勃发展,在硬件系统设计方面技术已较成熟,三维空间位置测量精度已达到相当高的水平。基于机载LiDAR的数据应用较多,在大量高精度信息数据获取的同时如何高效地完成数据处理并有效转化为工程应用成果成为目前重点研究问题。
大比例尺地形图是各类工程应用中最重要的参考依据,其生产效率和精度直接制约了后续工作的进程和质量。相比于传统的立体测图方式,基于点云数据生产地形图具有高程精度高、自动化程度高等优势。目前,在基于点云数据的地形图生产过程中已可实现高程点和等高线的自动生成,而建筑物边界等地物信息还需人工绘制。因此,如何基于点云数据实现建筑物的自动提取,进一步提升点云数据制图的自动化程度,提高生产效率,缩短生产周期,具有重要的现实意义[1]。
鉴于此,本文提出了一种基于机载点云数据的半自动化成图方法,其中,等高线、高程点和建筑物边界线能通过算法自动提取。由于等高线和高程点的提取可通过现有软件完成,本文对建筑物边界线的提取成图开展了深入研究,提出了一套完整的技术方案,并通过实验证明了其有效性。
1 点云制图流程
采用机载点云数据生产地形图的主要流程如图1所示,包括数据采集、数据预处理和点云制图3个部分。其中,数据采集和数据预处理的方法已较成熟,而点云制图主要仍在Terrasoild软件下完成,该软件能实现等高线的自动提取,但对于建筑物等地物还需通过人工采集完成[2-4]。
本文算法的核心问题就是实现机载点云数据生产地形图过程中建筑物边界的自动提取。通过软件提取等高线、高程点和本文方法提取建筑物边界后,再对照正射影像补充其他地形要素即可完成整个地形图的制作过程。

图1 机载点云生产地形图流程图
2 建筑物边界提取
建筑物边界的提取是机载点云生产地形图过程中的重要步骤之一,在提取建筑物边界前,需将建筑物点云提取出来,再使用建筑物边界线提取算法即可自动提取建筑物边界。
2.1 建筑物点云提取
建筑物点云提取主要包括地面点云滤除、点云分割和点云分类3个步骤。
2.1.1 地面点滤除
由于LiDAR系统获取的点云数据中不仅包含来自裸露地面的信息,还包含来自建筑物、树木、桥等非地面对象表面的信息。地面点云主要用于生成等高线和高程点,该过程已能实现自动化;当存在大量地面点云时,无法对其他地物点云进行有效处理,因此,在提取建筑物点云之前,需将地面点云滤除。地面点云滤除结果见图2[5-6]。

图2 点云数据地面点滤除结果
2.1.2 点云分割
对点云数据进行分割的目的即化繁为简,根据其几何或纹理特征将复杂的扫描场景点云分割成独立的地物点云集合,再通过分析独立地物集合的特征进行后续分类和识别操作,可大大简化点云数据处理的复杂度。目前,散乱点云数据的分割方法主要包括区域增长法、基于特征图像的方法和空间特征聚类法。滤除地面点云后,本文使用空间特征聚类法对非地面点云进行空间聚类分割处理,将离散点分割为独立的地物点集合,分割结果如图3所示,不同的颜色代表不同的地物点集合。

图3 非地面点云数据分割结果
2.1.3 点云分类
经过分割的点云数据可再进行点云的分类,将独立的地物点集合赋予类别属性,对于制图应用来说,兴趣对象类别包括建筑物、植被和桥梁等。首先采集兴趣地物的样本,并确定分类特征和分类模型再进行训练。本文采用的分类特征主要包括高度、长宽比、面积、粗糙度、法向量、曲率等几何特征,使用的分类模型是随机森林,分类结果如图4所示,绿色点云为植被,红色点云为建筑物。
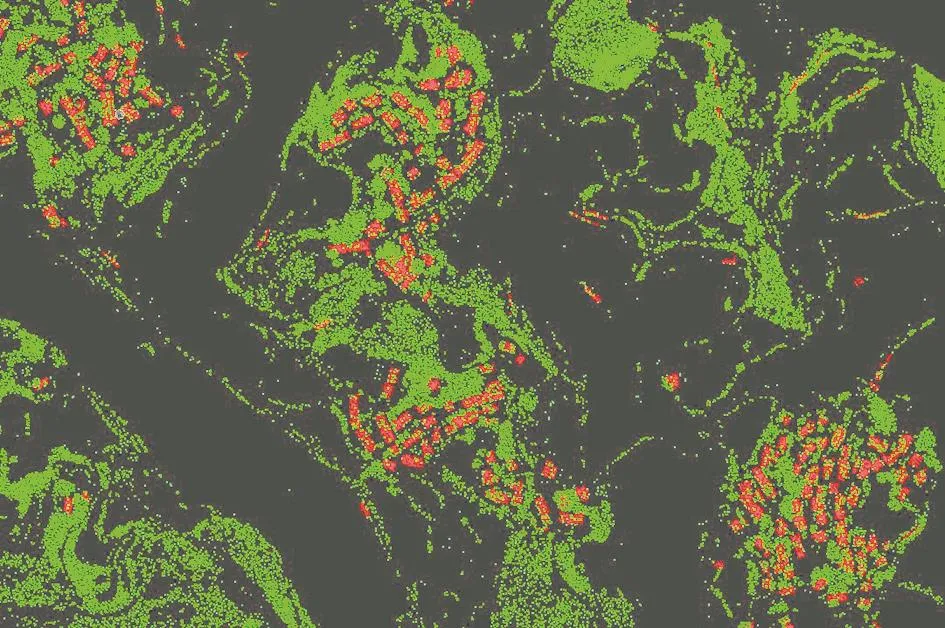
图4 点云分类结果
2.2 建筑物边界自动提取
在完成建筑物点云提取并单体化后,即可自动提取每块建筑物点云的边界。边界提取主要包括边界点提取、边界点简化、边界拟合3个步骤。
1)边界点提取,采用Alpha Shape算法。其算法思想为:假设有1个点云数据集S,且外部有1个半径为α的圆沿S滚动,当α足够大时,这个圆将在点云的外围滚动;而当α较小时,该圆将落到点云内部。根据这一准则,将LiDAR点云数据中每两个点和给定半径α确定一个圆,当圆中没有其他点时,该点即为边界点。
2)边界点简化。建筑物边界点云包含整个建筑物边界的离散点,而在地形图生成的过程中只需要建筑物边界的角点,因此需对提取的建筑物边界点进行简化,以满足地形图生产的需求。由于建筑物角点的夹角一般为90°,依此可对建筑物边界点进行判断,筛选建筑物角点。
3)边界拟合。经过边界点提取和简化后,提取出的建筑物边界已接近于真实建筑物的形状,但由于激光扫描获取的点云数据并不完整,导致提取的建筑物边界精度不够理想,还需对边界进行精化处理,以提高建筑物边界的提取精度。采用RANSAC方法对每条建筑物边界上的点云进行直线拟合,得到最精确的边界。通过边界线求交可获取精确的建筑物角点。建筑物边界的提取结果如图5所示。
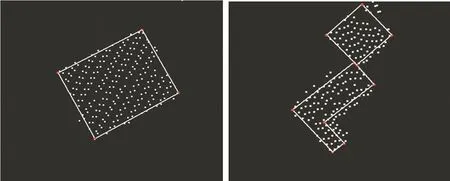
图5 建筑物边界提取结果
3 实验分析
本文以Leica ALS60机载扫描系统获取的点云数据为实验数据,从建筑物的有效提取率和边界提取的绝对精度两个方面来验证整体提取精度。
有效提取率即所有提取正确的建筑物与整个范围内建筑物总数之比。整个范围内建筑物数量需结合正射影像统计获取。据统计,测区范围内共有建筑物356 栋,自动提取获得325栋,有效提取率为91.2%。由于ALS60设备点云较稀,部分面积较小的建筑物没有被正确提取,对于没有被提取的建筑物还需结合正射影像人工判别。
除了对建筑物的有效提取率进行检查之外,本文还对边界提取的绝对精度进行了检查论证。通过外业采集房顶角点的方式对建筑物边界提取的绝对精度进行检查。部分建筑物边界提取结果和控制点位置如图6所示。本文共采集50个建筑物角点进行精度检查,统计求得平面中误差为0.65 m。建筑物边界的提取平面精度主要受点云数据质量的影响,点云越密集,绝对精度越高,则提取的边界精度越高,整个提取过程中高程精度未损失。

图6 部分建筑物提取结果及控制点
完成精度验证后,利用本文所设计的智能化成图流程对实验测区进行了1∶2 000地形图制图,制图成果如图7所示。测区面积为3 km2,若采用传统立体测图方式需2工天完成,而采用本文作业流程只需0.5工天,生产效率提升了3倍,且地形图成果拥有更高的高程精度。

图7 智能化成图案例
4 结 语
根据机载点云数据的特点,本文提出了一种基于机载点云数据的智能化成图作业模式,可通过自动提取等高线、高程点、建筑物等地形要素,大大减少地形图制作的内业工作量。本文对整个作业流程中的建筑物边界提取方法开展了深入研究,提供了点云滤波、点云分割、点云分类、建筑物提取、边界线提取等步骤的技术方案;并利用项目数据进行了实验分析,结果表明该方法具备较高的提取有效率和精度。在后续研究中,可进一步开展对其他地物的智能化提取和成图方法研究,以提高基于点云数据生产地形图的精度和效率。
[1] 黄克城,宋时文,阎凤霞.机载LiDAR技术在地形图测绘中的应用[J].地理空间信息,2016,14(4):99-101
[2] 冯梅,钟斌.基于LiDAR点云自动生成等高线的方法研究[J].测绘与空间地理信息,2012(6):87-90
[3] 张小红,刘经南.机载激光扫描测高数据滤波[J].测绘科学,2004,29(6):50-53
[4] 陈弘奕,胡晓斌.海量点云数据等高线生成算法研究[J].测绘通报,2013(10):83-86
[5] Axelsson P.DEM Generation from Laser Scanner Data Using Adaptive TIN Models[J].International Archives of Photogrammetry and Remote Sensing,2000,33(B4/1):111-118
[6] Vosselman G. Slope Based Filtering of Laser Altimetry Data[J].International Archives of Photogrammetry and Remote Sensing,2000(33):935-942
[7] 赵小阳,孙颖.基于LiDAR点云的建筑物边界提取及规则化[J].地理空间信息,2016,14(7):88-90
猜你喜欢
测绘学报(2021年11期)2021-12-09
激光技术(2021年5期)2021-08-17
当代陕西(2020年23期)2021-01-07
广东教学报·教育综合(2019年87期)2019-09-10
测绘通报(2019年1期)2019-02-15
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
地理教育(2016年10期)2016-11-09
全球定位系统(2015年4期)2015-02-28
浙江国土资源(2014年5期)2014-04-28
电脑与电信(2014年6期)2014-03-22
