米线自动切割一体机的研制
2018-06-05 08:41:46朱家诚苗凯武林
机械 2018年5期
朱家诚,苗凯,武林
米线自动切割一体机的研制
朱家诚,苗凯,武林
(合肥工业大学 机械工程学院,安徽 合肥 230009)
针对人工切割米线劳动强度大、工作效率低并且存在安全隐患等缺点,通过分析米线的产品特点确定其加工需求。按照模块化设计理念,将整机分成几个功能模块,并对各功能模块的工作原理和驱动方式进行构思和系统性设计,研发了一种米线自动切割一体机。采用PLC对其控制,并运用SolidWorks建立其三维模型,对关键部件进行理论计算及ANSYS有限元分析,详细论证了方案的可行性。
米线切割;自动化控制;食品机械;有限元分析
米线[1-2]的生产规模不断扩大,带动了米线生产加工机械装备的发展。米线生产工序复杂,针对其中的切割工序,目前还是人工切割,无法满足企业发展的需求。
采用并行设计思想[3],制定出米线自动切割一体机方案,论证了方案的可行性,对切割部分采用四个工作位同时进行的加工方式,最后对关键结构进行静力学分析。该米线自动切割一体机操作简洁,减轻了人工切割米线的劳动强度,保证了人身安全,提高了生产效率。
1 方案设计与分析
先对米线自动切割机一体机进行功能分析与分割,按照模块化设计思路[4],对每个功能模块进行详细设计与分析,最后采用自上而下设计方法,对各功能模块进行虚拟装配[5]。另外再对关键部位做必要的理论计算和应力分析。
1.1 功能分析与分解
经机房烘干后的一杆米线,沿杆长方向排列的宽度400 mm,长度1300 mm,每三杆米线一起切割,切割成四段,每段长度约320 mm。工作流程如图1所示。
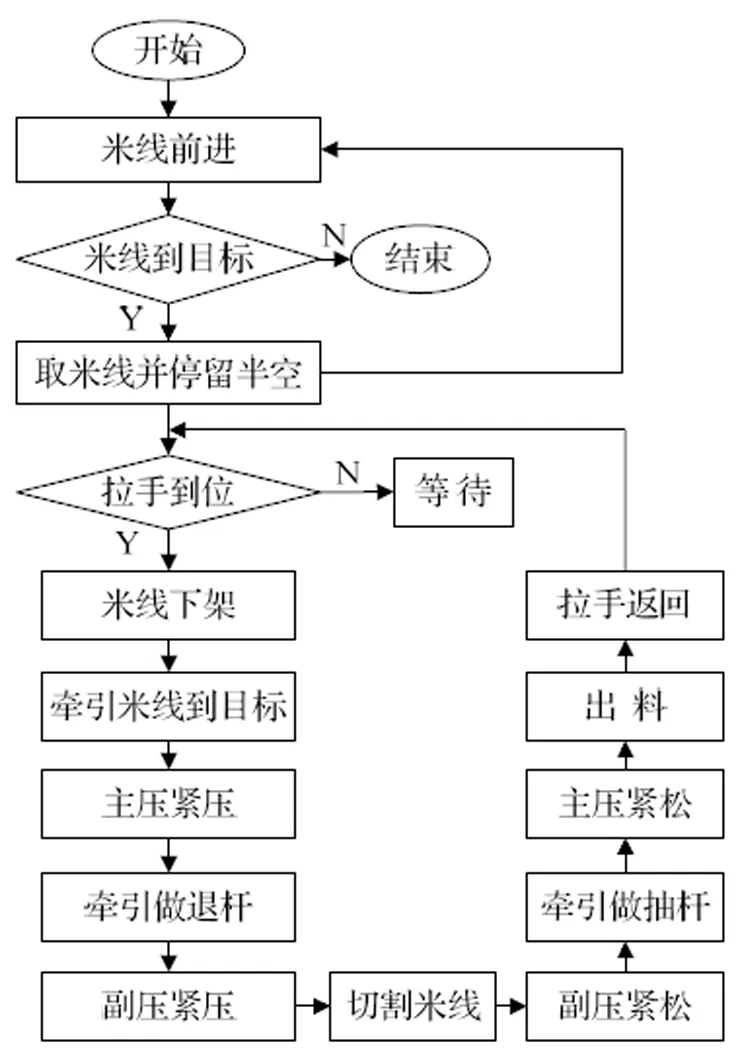
图1 工作流程
米线悬挂在由链传动机构构成的生产线上,米线由链传动机构牵引在生产线上前进,到达目标位置后,将三杆米线一起取下,并牵引到切割工作平台上,完成退杆后,进行米线切割工作,接着将切好的四段米线移出至预定位置。切割时采用硬质合金钢圆锯片作为切割刀具[6],同时在米线下架时为了避免翻转平台上的米线将生产线上的米线托起,导致米线从生产线掉落,通过分析与运动模拟,将翻转平台的两个极限位置设计成倾斜状态,如图2所示。
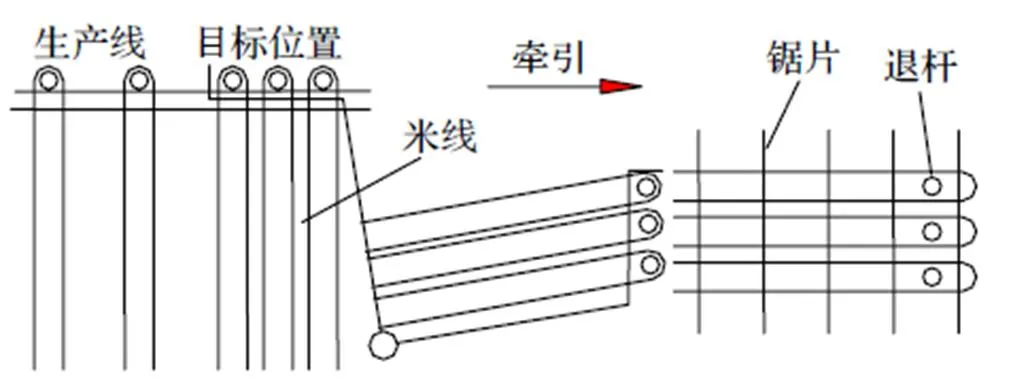
图2 工作示意图
设计了米线下架结构和米线并联加工的工作方式,实现了米线的自动上料和切割,除了能满足设计要求,还可加工不同规格的米线。
根据功能分析与分割的结果,将米线自动切割机一体机分为下架模块、牵引模块、压紧模块、切割模块、出料模块等。各模块关系确定后,对各模块进行详细设计[7]。
1.2 下架模块
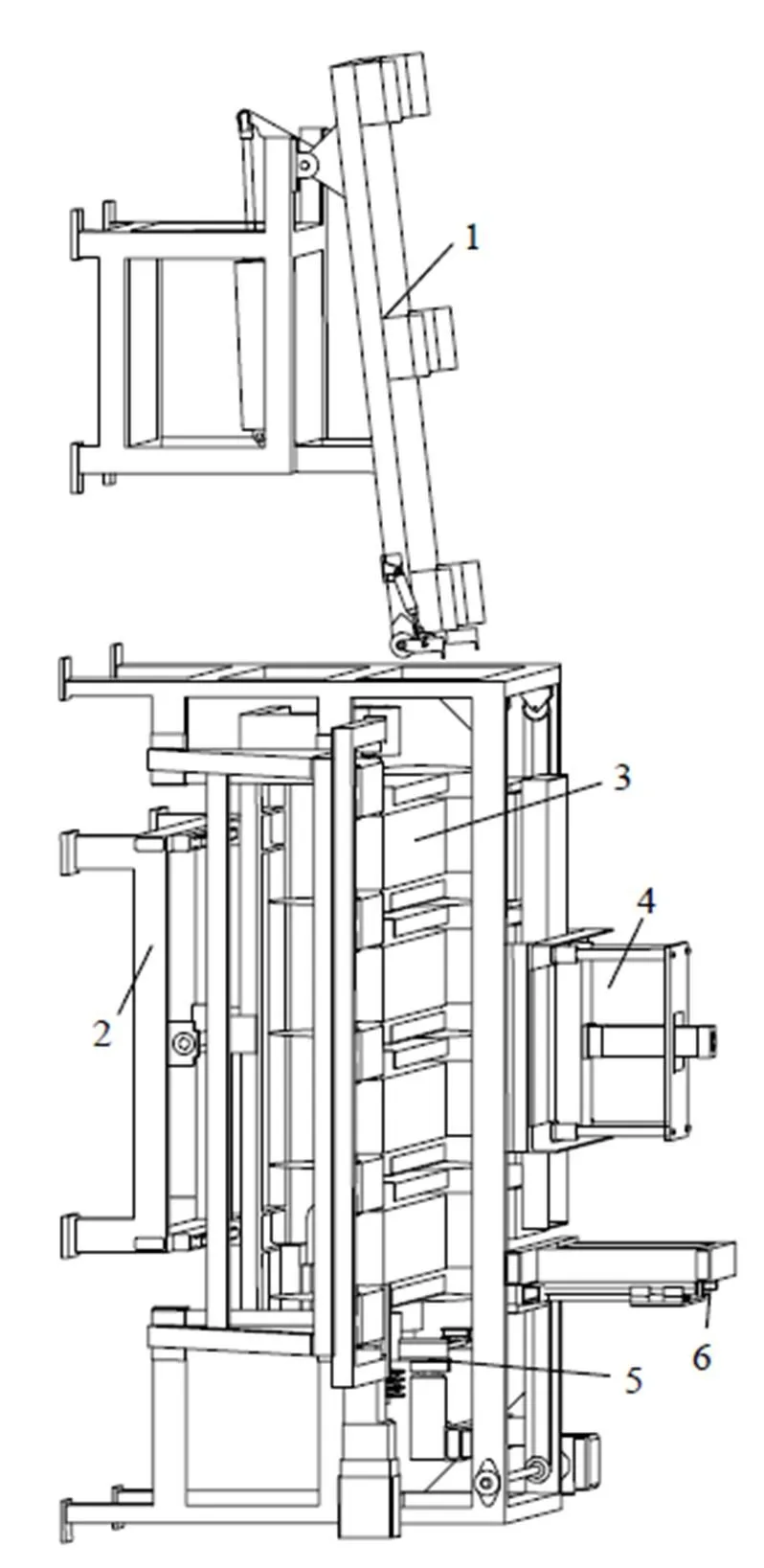
下架模块的功能是将烘干后的米线从生产线上取下架,其关键执行机构是抓取机构和翻转机构,如图3所示。抓取机构的执行构件抓钩采用对称位置设计,布置在翻转平台两侧,抓钩采用键连接和紧定螺钉连接的方式固结在同一根轴上,轴通过轴承装在翻转平台上,抓钩气缸采用非对称位置布置且与同侧抓钩采用肘接头连接,驱动抓钩执行动作。翻转机构由气动元件和翻转平台组成,其气缸布置在中间位置。机架上装有缓冲构件,用来缓冲翻转平台翻下时产生的冲击。翻转平台两侧装有挡板,防止米线在下架过程中从两侧散开。
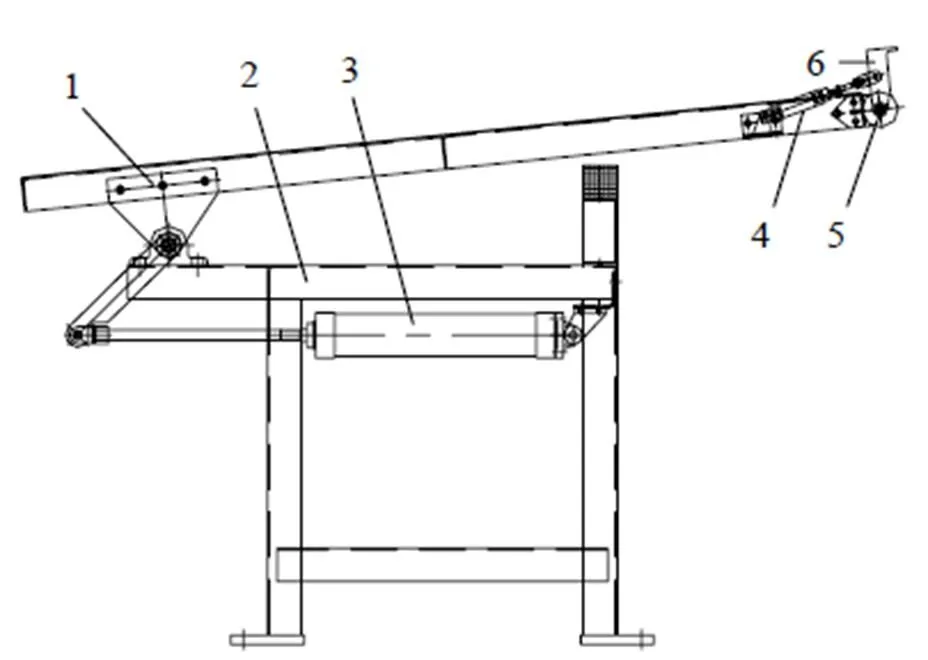
1.翻转平台 2.机架 3.翻转气缸 4.抓钩气缸 5.轴承及轴 6.抓钩
米线到达目标位置后,抓钩气缸推动抓钩,抓取三杆米线头部的杆子,然后翻转气缸推动翻转平台,停在半空中,待判断拉手到位后,继续下翻至极限位置将杆子压入到拉手中。
1.3 牵引模块
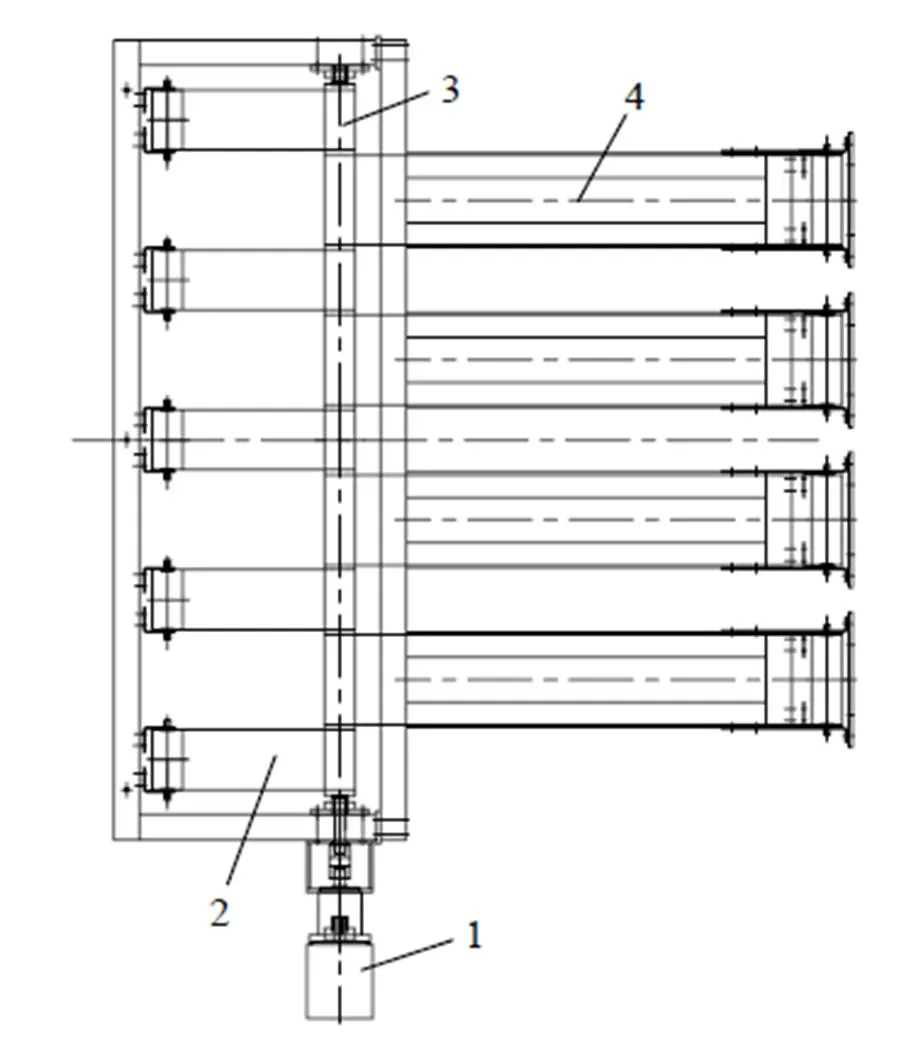
米线下架后,牵引模块将米线迁移至目标位置且平铺在出料模块输送带上,如图4所示。
牵引模块由左右拉手机构、同步带传动机构和直线滑轨导向机构组成。左拉手装在双轴气缸轴端,气缸装在折弯件上,左右拉手对称固定在三联件两端,三联件两端分别与直线滑轨和同步带固结。左拉手的主要功能:主压紧压紧米线后,将米线头部的杆子左端向后推,使杆子与米线松动,便于牵引模块将米线杆整体退杆。

1.从动带轮 2.米线 3.同步带 4.右拉手 5.直线滑轨 6.主动带轮及伺服驱动
1.4 压紧模块
压紧模块包括主压紧模块和副压紧模块,如图5、图6所示。主副压紧模块动作不一致,两者都是由气缸驱动,前者由四根导向轴导向,后者由圆柱滑轨导向。
1.长枕头 2.移动框架 3.导向轴 4.气缸 5.固定框架 6.短枕头

1.固定框架 2.端压板 3.圆柱滑轨 4.移动框架 5.气缸 6.压板
枕头两侧有压板,空腔填充海绵,用松紧带包包裹。主压紧压紧米线时,中间的海绵被挤压,成拱形;两侧的压板与出料模块的宽输送带表面压紧,米线被收拢在两侧压板之间。保证切割米线时,米线不会挤出压板外侧,完全被切割。主压紧模块中的短枕头和副压紧模块共同压紧位于退杆位置的这段米线。
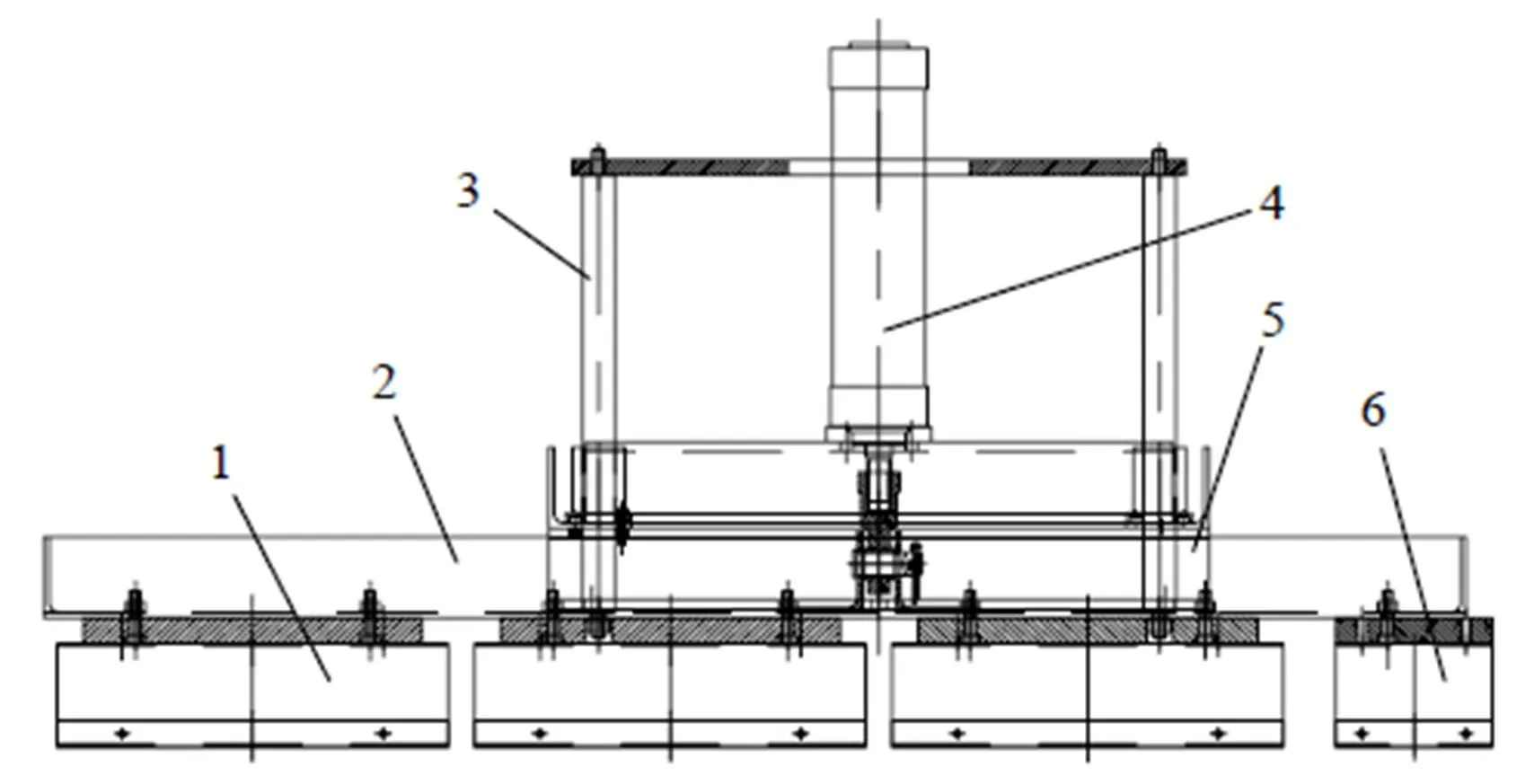
1.5 切割模块
切割模块是米线切割一体机的主要动力部分,如图7所示,由伺服驱动系统、滚珠丝杠副传动机构、直线滑轨导向机构和执行机构组成。执行机构中五片锯片由紧定衬套和法兰盘等距对称地装在轴上,由三相异步电机驱动。
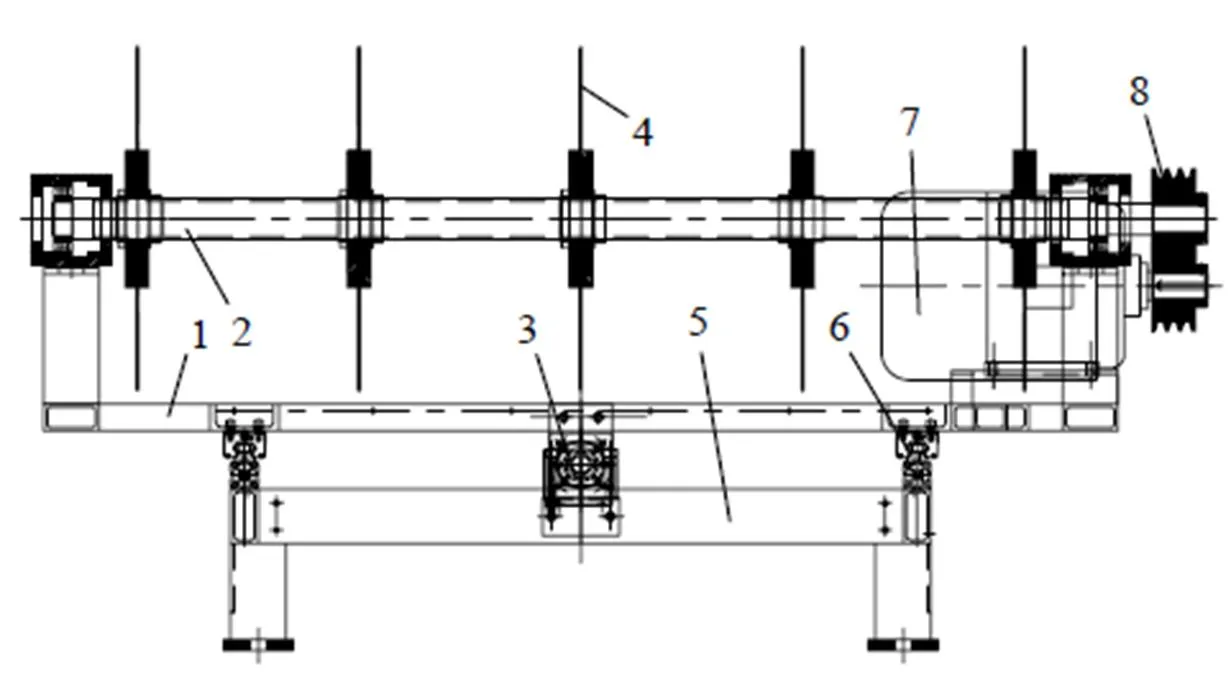
1.移动平台 2.轴 3.丝杠及伺服电机 4.锯片 5.机架 6.直线滑轨 7.三相异步电机 8.带轮
1.6 出料模块
出料模块由四根宽输送带和五根窄输送带交错绕在同一个主动滚筒上组成,并由伺服系统驱动,如图8所示。米线先是牵引到四根宽输送带上,出料模块在压紧模块松开米线后再将切好的米线移出至五根窄输送带上。
1.7 米线自动切割一体机总体结构
功能模块经过详细设计之后,根据总体构思和装配原理,将各功能模块集成设计成米线自动切割一体机,建立三维模型,如图9所示。
2 切割力计算
采用硬质合金圆锯片作为切割米线的刀具。切割过程中,锯片旋转的同时有横向移动,所以切割力有切向力F和径向力F,如图10所示。为保证切断米线,下面以切向力计算为主。
1.伺服驱动部分 2窄输送带 3.主动滚筒 4.宽输送带
1.下架模块 2.切割模块 3.出料模块 4.主压紧模块 5.牵引模块 6.副压紧模块

式中:为传动比;d1、d2分别为主从动带轮基准直径,mm;1为Y132S-4三相异步电机额定转速,r/min;2为锯片轴转速,r/min。
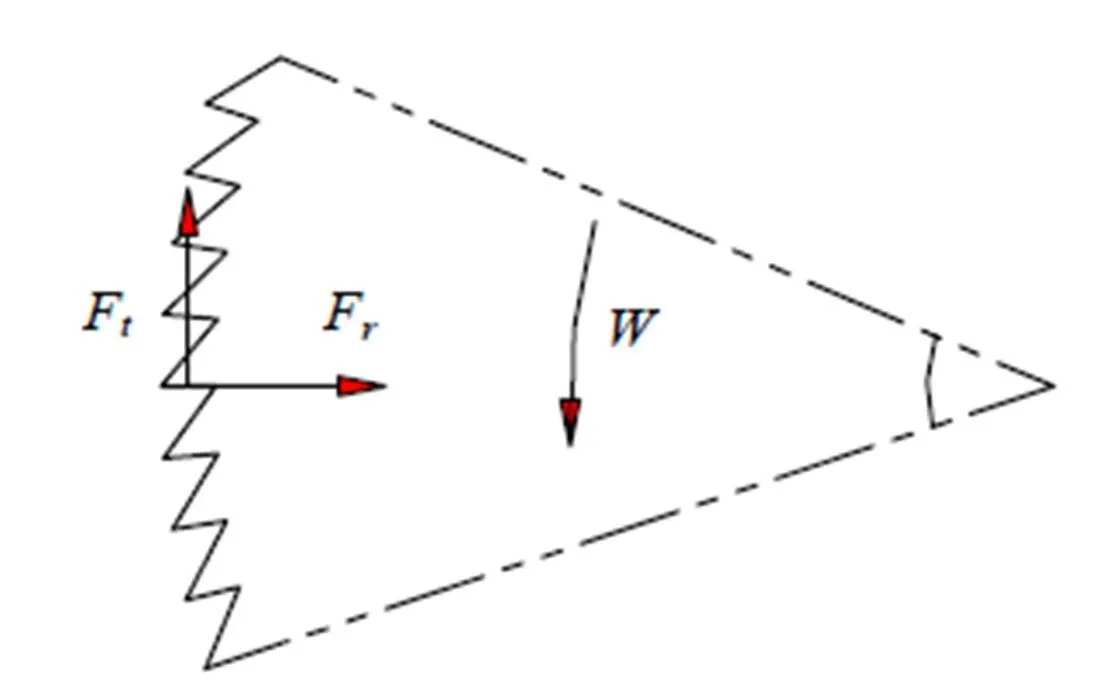
图10 米线切割局部锯片受力示意图
式中:1为轴的传递功率,kW;为带传动效率,为0.92~0.97,取=0.95;为Y132S-4三相异步电机额定功率,kW。
式中:为轴所受的扭矩,N·m。

式中:F为每个锯片所受的切向力,N;为锯片的半径,mm。
由于干米线很脆,这个力能够保证将米线切断,若米线切不断,会使锯片卡住不动,导致电机烧毁等问题出现。此外,如果米线切不断,由于移动平台继续往前移动,可能将米线挤到压板外侧。
3 锯总成中轴的应力分析
轴是锯总成中关键的受力部分,建立三维模型,然后对其进行应力分析[8]。先对轴添加位移约束,再添加轴承支撑力400 N,扭矩38.8 N·m,压轴力180 N,每个锯片的切向力31 N,忽略锯片重量。由图11可知,轴的应力集中在带轮的定位轴肩处,最大应力约为7.8 MPa,没有超过轴的材料45钢的屈服极限。由图12可知,轴的最大变形位于第一个锯片附近,最大变形量约为0.02 mm。米线切割精度要求不高,变形量满足使用要求。
4 控制部分
为实现设备自动化,便于智能化管理,遵循“稳定、便捷”的原则[9]。切割声音大,粉尘比较严重,酸性气味浓,基于上述工作环境及PLC具有抗干扰能力强、可调整性好及易操作性的特点,选用PLC作为控制程序,并采用人机操作界面。程序采用梯形图进行编写,通过控制输入信号、输出信号对整个系统的流程进行控制。控制系统如图13所示。
采用触摸屏和PLC双向通讯的方式,实时监控设备的运行状态,通过触摸屏可以设定设备工作状态的运动数值。在控制程序的各个关键环节都加入了错误报警,一旦有故障出现,指示灯闪烁且触摸屏显示错误信息,设备就会立即停止工作,防止出现不必要的意外事故。
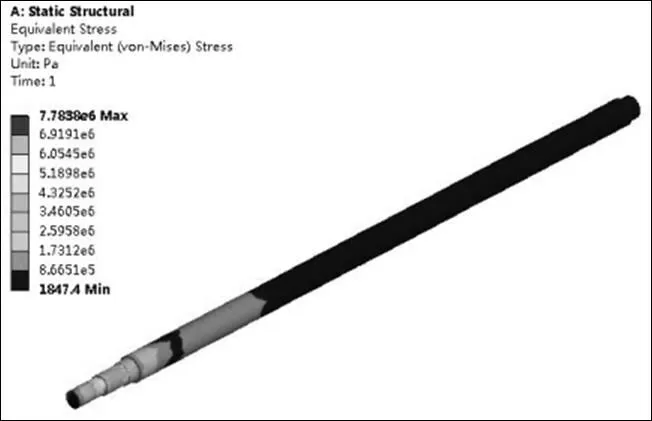
图11 轴的应力云图

图12 轴的位移云图
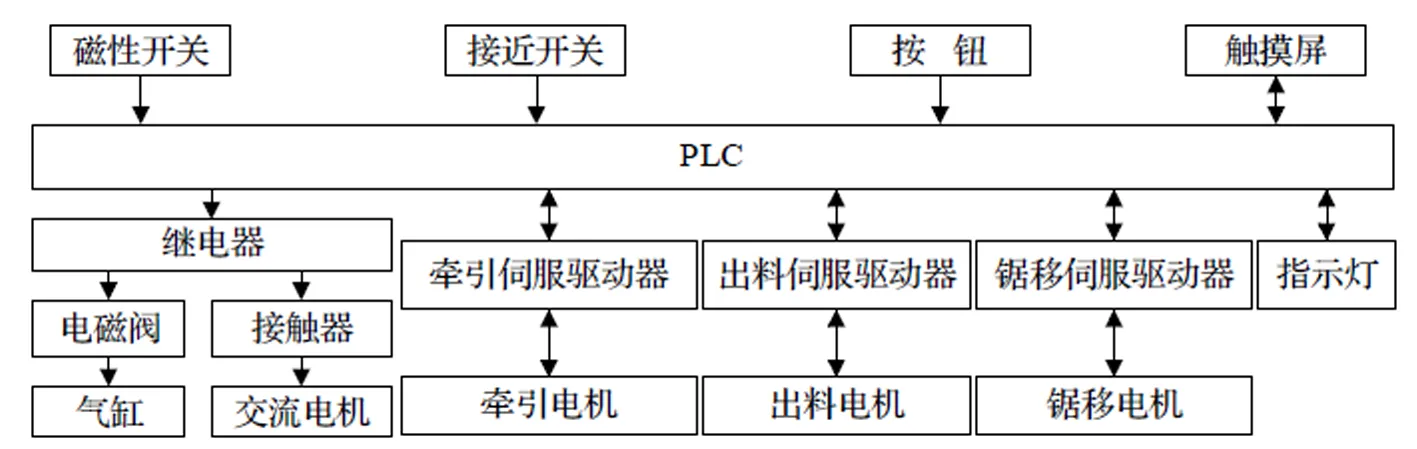
图13 控制系统执行图
5 总结
米线自动切割一体机为实现不同直径规格的米线切割加工提供了新的解决方案,从米线的下架、切割到出料实现了完全自动化,节省了劳动力、减轻了劳动强度、降低了时间成本。采用四个工作位同时切割四段米线的加工方式,相比于一段米线切完接着切下一段的加工方式,生产效率得到了极大提高。
米线自动切割一体机依然还有很大的改进空间,比如下架模块,可以用向下倾斜布置的链传动机构实现米线下架,米线可从生产线上由链条带下来,米线头部的杆子直接落入到左右拉手中。另外锯片固定在轴上的方式可以用胀套代替紧定衬套,胀套端面上由多个螺栓连接,胀套连接会更加可靠。
该设备已经研制成功,通过实际生产应用,其呈现的问题得到了进一步完善。
[1]张喻,杨泌泉,吴卫国,等. 大米淀粉特性与米线品质关系的研究[J]. 食品科学,2003,24(6):35-38.
[2]张水华,孙君社,薛毅. 食品感官鉴评(第2版)[M]. 广州:华南理工大学出版社,1999.
[3]李思昆,郭阳,杨强,等. 面向并行设计的虚拟原型技术研究[J]. 计算机辅助设计与图形学学报,1999(3):241-244.
[4]贾延林. 模块化设计[M]. 北京:机械工业出版社,1993.
[5]王波,张崎静. Solidworks三维建模设计课程教学模式改革与实践[J]. 长春教育学院学报,2014(1):133-134.
[6]罗文. 硬质合金圆锯片的使用[J]. 家具,2000(5):54-55.
[7]濮良贵,纪名刚. 机械设计(第8版)[M]. 北京:高等教育出版社,2006.
[8]李黎明. ANSYS有限元分析实用教[M]. 北京:清华大学出版社,2005.
[9]王起. 论PLC、单片机、工控机在工业现场中的应用及选用方法[J]. 轻工科技,2011,27(1):60-61.
[10]秦益霖. 西门子S7-300PLC应用技术[M]. 北京:电子工业出版社,2007.
Development of Automatic Cutting Machine for Rice Noodle
ZHU Jiacheng,MIAO Kai,WU Lin
( School of Mechanical Engineering, Hefei University of Technology, Anhui Hefei 230009, China)
For the artificial cutting rice noodle labor intensity, low efficiency and the existence of security risks and other shortcomings, by analyzing the product characteristics of rice noodles,the processing needs is determined. In accordance with the modular design concept, the machine is divided into several functional modules, and the working principle and the driving way of each functional module are conceived and systematically designed, developed a noodle automatic cutting machine. Using PLC to control it, and Solidworks is used to build its three-dimensional model, the key components is theoretically calculated and analyzed by ANSYS software, the feasibility of the program is demonstrated in detail.
rice noodle cutting;automatic control;food machinery;finite element analysis
TH16
A
10.3969/j.issn.1006-0316.2018.05.012
1006-0316 (2018) 05-0043-06
2017-06-26
朱家诚(1959-),男,安徽合肥人,博士,教授,主要研究方向为机电产品设计、软件开发;苗凯(1988-),男,安徽阜阳人,硕士研究生,主要研究方向为机电装备成套技术与系统。
猜你喜欢
金属加工(冷加工)(2023年10期)2023-10-23 02:10:06
石材(2022年4期)2022-06-15 08:55:26
少儿美术(快乐历史地理)(2020年5期)2020-09-11 06:09:14
设备管理与维修(2019年10期)2019-02-16 19:16:36
商周刊(2018年24期)2019-01-08 03:30:40
电子测试(2018年13期)2018-09-26 03:29:48
汉语世界(2016年5期)2016-10-25 01:42:21
重型机械(2016年1期)2016-03-01 03:42:06
焊接(2015年12期)2015-07-18 11:13:04
西安工业大学学报(2014年12期)2014-12-26 03:34:44