
农用轮式机器人运动控制系统设计与试验
2018-06-05 15:00李格伦崔天时刘春莉王立峰
农机化研究 2018年2期
李格伦,崔天时,刘春莉,王 锐,王立峰
(东北农业大学 电气与信息学院,哈尔滨 150030)
农用轮式机器人运动控制系统设计与试验
李格伦,崔天时,刘春莉,王 锐,王立峰
(东北农业大学 电气与信息学院,哈尔滨 150030)
针对农用轮式机器人控制系统的实时性和农田环境精确控制能力欠缺等问题,提出了以STM32作为系统控制核心,DSP作为电机驱动核心,基于数传电台和CAN总线的嵌入式控制系统。设计中,创新性地采用三级递阶控制方案对机器人进行模块化编程,并采用机器人地面站软件平台对轮速进行实时监测。实际运行结果表明:该控制系统具有较高可靠性和稳定性,且系统扩展能力强。
农用轮式机器人;三级递阶控制;CAN总线
0 引言
当前,机器人在农业生产中得到了越来越广泛的应用,移动机器人是农业机器人研究领域的一个重要分支,也是研发较早的一种机器人,主要包括轮式、足式、跳跃式及蛇形式等。其中,足式机器人虽然适应性强,但机构复杂,导致难以控制;履带式移动平台移动速度慢、转向时对地面破坏程度大;跳跃式和蛇形式在复杂环境和机动性等具有独特的优越性,但运动平稳性及承载能力都明显逊色于轮式机器人[1]。
轮式移动机器人速度快,运动平稳而灵活,承重能力及适应能力极强,虽具有无法在极复杂地形进行精确的轨迹控制等问题;但由于具有自重轻、机构简单、承载能力强及工作效率高等优点,在农业领域有着广阔的引用前景及不可撼动的地位,已经成为农业发展中的重中之重。
针对农田环境复杂因素较高等问题,本文提出了利用两个控制器分别做控制核心和驱动核心的创新结构设计,保证了农用轮式机器人执行任务时控制器的效率问题。机器人的电机模块由前轮和后轮2个独立驱动器模块和4个直流无刷伺服电机组成,每个驱动模块都是一套完整的直流无刷伺服驱动控制方案,并对直流无刷电机搭配减速器(减速比50:1),1024线光电编码器,可以对电机的速度、电流进行闭环控制。采用分布式三级递阶控制方案,可以使轮式机器人工作稳定性强,系统可维护程度高,并且方便扩展。
1 轮式机器人总体设计
农用轮式机器人运动控制系统采用模块化设计方案,机以器人主要由直流无刷伺服电机、电池模块、主体框架及控制核心模块构成,本设计方案将各模块通过总线传输的方法融合为一个整体,降低了系统维护成本且便于机器人二次开发。
机器人整体设计尺寸为长830mm、宽829mm、高580mm,整机自身质量为90kg(含电池),平地有效载荷100kg,15°坡面有效载荷50kg,为了适应水泥、草地、雪地、泥地、沙石地等复杂地形,使农用轮式机器人具有良好的移动能力,因此采用高地隙底盘结构[2],地盘离地高度160mm,前后轮轴距400mm,轮径350mm,采用上述设计方案可以保证机器人具有良好的扩展能力(如安装喷药设备、机械臂或者全景摄像头),从而针对不同的研究方向完成各种任务。该设计方案也可以保证机器人移动灵活,转完时可以达到360°零转弯半径,以适应农业领域各种复杂环境下的工作方式[3]。
机器人整体外观示意如图1所示。农用轮式机器人使用四轮驱动行走方案中,通过理论计算与经验分析,选用4X940W直流伺服电机驱动,使用无刷直流型(brushless direct current,BLDC)电机,其工作电压为24V,此外还配备了减速箱[4],其减速比为50:1,最高时速可以达到30.2km/h。同时,每个电机配备1024线旋转编码器,从而保证精确的位置、速度控制。
其他配套设施主要有:
1)电池模块。机器人采用两组76.8V、放电能力为430Wh的高性能磷酸铁锂电池。机器人外部设有手动急停开关,用于紧急制动。
2)控制舱模块。此模块是轮式机器人的核心部分,包括系统控制核心单元和电机驱动核心单元。
3)系统状态监视器。机器人设有系统电源状态监视器,显示当前系统电源电压和输出电流;主控制器STM32将AD从电源管理模块采集的电流和电压值经转换处理后,通过RS422总线将当前系统电源电压和电流值显示在监视器上,以供查询机器人电池电量及在调试机器人时得到当前电源输出的相关信息。为防止电压过低或电机过载对机器人造成损坏,系统会在电源过低或电机过载的情况下停止机器运行,并通过控制监视模块集成的蜂鸣器提示警告。
4)探照灯控制模块。机器人前端配有两个探照灯,具有8~30V的输入电压范围,最大输出1.2A的电流,可进行模拟调光和PWM调光。
2 四轮控制系统硬件结构设计
本文基于农用轮式机器人多样化、适用于农田复杂化作业及模块化设计等方法[5],设计了机器人控制系统的硬件部分,轮式机器人的时速可以在0~30.2km/h内稳定运行,并能够自由完成转向与行走等任务。
控制系统整体硬件结构采用模块化机器人系统(Modular Robotic System, MRS)设计方案,该方案不但可以增强系统容错能力,还能提高系统可扩展性,使机器人在工作过程中表现出良好的适应性、灵活性及稳定性[6]。
控制系统的整体结构主要由4个模块组成,分别是控制核心模块、电机驱动模块、机器人地面站软件及遥控模块,如图2所示。
1)系统的控制核心选择了STM32F405RGT6增强型微控制器,主要任务是数据的接收、处理与发送等工作,能够实现双路CAN总线并行发送与接收;通过连接PPM信号接收机获取天地飞遥控器的无线数据,是机器人控制系统信息交互的核心部分。
2)农用轮式机器人地面站软件部分通过数传电台方式与控制核心模块进行通讯,实现轮式机器人4个电机的转速和转向数据的显示功能。
3)天地飞遥控器通过配套接收机与控制器进行无线通信,并可以实现对机器人的行走和转向等行为的控制。
4)电机驱动模块是整个系统的运动核心,基于32位DSP芯片开发,采用电子差速转向系统,通过CAN总线与控制核心进行数据通信,电子差速控制器通过综合天地飞遥控器信号以及车轮反馈的速度和信号,计算速差和分配转速,控制4个电机的速度而实现移动机器人的无级转向。

图2 控制系统整体结构示意图Fig.2 Overall structure schematic diagram of control system
2.1 控制核心模块
农用轮式机器人控制核心采用意法半导体公司生产的STM32F405RGT6型号单片机,此单片机的主要有以下4点优势:
1)自带2个bxCAN控制器,并且支持的波特率最高达1Mbps;
2)ADC是3个12位的逐次逼近型的模拟数字转换器,且可以独立使用,可编程检测输入电压是否超出用户定义的高/低阈值;
3)具有6个可编程的串行通讯接口,方便使用RS232、RS422等其他总线,保证机器人的与外设模块的通讯的同时,又便于增强与扩展其他功能;
4)多达6个定时器通道可用于PWM输出,可以轻松控制前后两组探照灯的亮度,且方便二次开发。
图3为核心控制模块CAN总线和RS422总线部分的具体电路连接方案。

图3 CAN总线与RS422总线电路连接方案Fig.3 Circuit connection scheme of CAN bus and RS422 bus
2.2 电机驱动模块
电机驱动模块产生一定PWM信号控制BLDC电机外,还要与控制核心STM32单片机进行实时通讯。驱动部分由核心处理器TMS320LF2407ADSP芯片和驱动电路构成,包括电源转换电路、时钟复位电路及CAN总线通信电路。
如图4所示,驱动系统主要由以下4个部分构成:
1)CAN总线驱动器使用的是SN65HVD231,是TI专为DSP片内的CAN控制器设计的CAN驱动芯片。
2)无刷直流电机驱动芯片采用MC33035,并且在MC33035与DSP连接的管脚加装了光耦隔离芯片,从而保证了电机驱动任务的安全性。通过改变PWM波的占空比,即可调节电机转速。
3)采样电压由IR2130的过电流信号检测输入端电流检测比较器,比较器反相输入端设置有500mV基准电压,当采样电压高于500mV时产生过流保护。
4)DSP具有正交编码单元电路(QEP)和捕获单元电路(CAP),是专为编码器应用设计的电路[7]。这里使用了增量式1024线光电编码器,不仅保证了超高的测速精度,也保证了测速的效率。

图4 电机驱动系统结构框图Fig.4 Construction frame of motor drive system
3 电子差速转向原理
由于本文中农用轮式机器人的开发理念是为了使机器人能够更好地完成农田作业任务,农用轮式机器人的4个车轮由4个电机独立驱动。机器人转向是使用电子差速技术实现的,电子差速技术是控制器采用电子控制的方式控制4个电机的转速。由于内外侧轮的转速不同,在一段时间内内侧车轮行驶的距离比外侧车轮行驶过的距离小,所以机器人就会向内侧偏转,使得机器人转向。
图5为四轮机器人车辆转向运动模型,主要参数:φ为转向角;L为车身长度;W为车身宽度;R为转向半径;Rin为内轮转向半径;Rout为外轮转向半径。
设机器人以v的速度转向,4个车轮的转速值分别为:前内轮转速称为v1,前外轮转速称为v2,后内轮转速称为v3,后外轮转速称为v4。对机器人转向过程进行分析,4个轮的转速分别为
v1=v(1-tanφW/L)
(1)
v2=v(1+tanφW/L)
(2)
v3=v(1-tanφW/2L)
(3)
v4=v(1+tanφW/2L)
(4)
由式(1)~式(4)可知:v1、v2、v3、v4都是关于车速v和转向角φ的变量。
农用轮式机器人在移动过程中,由于农田不平整及轮胎参数的不同,驱动电机的转速就会受到影响。因此,使用PID调速方法对电机转速进行闭环控制,可以使4台电机转速控制更为精确。
根据电机目标转速与编码器采集的电机实际转速的差值,采用4路并行的电机转速PID控制对4个电机的转速同时进行闭环控制。电机转速PID闭环控制系统中,电机的调速电压计算式为
Um=kpe+ki∫edt+kdde/dt
(5)
其中,e为电机目标转速与电机实际转速之差;kp、ki、kd分别为比例、积分、微分系数,通过多次试验结果整定。

图5 四轮机器人转向运动模型Fig.5 Steering motion model of four wheeled robot

图6 电子差速控制流程图Fig.6 Flow chart of electronic differential control
4 试验结果与分析
为了更好地实现该农用四轮机器人的电子差速转向功能,根据四轮机器人的相关参数,取L=750mm、W=720mm,并在给定车速分别取4km/h和8km/h。四轮机器人转角在[-60°,+60°]变化时,针对4个车轮的转速控制精度进行了测试,计算机经数传电台得到4个车轮的实际转速以及设定角度值,并对两前轮速度和两后轮速度取差值。前轮速差和后轮速差变化曲线如图7和图8所示。

图7 前右轮和前左轮速差随车速和转向角的变化Fig.7 Curves of velocity difference between right and left front-wheelwith different speed and steering angle
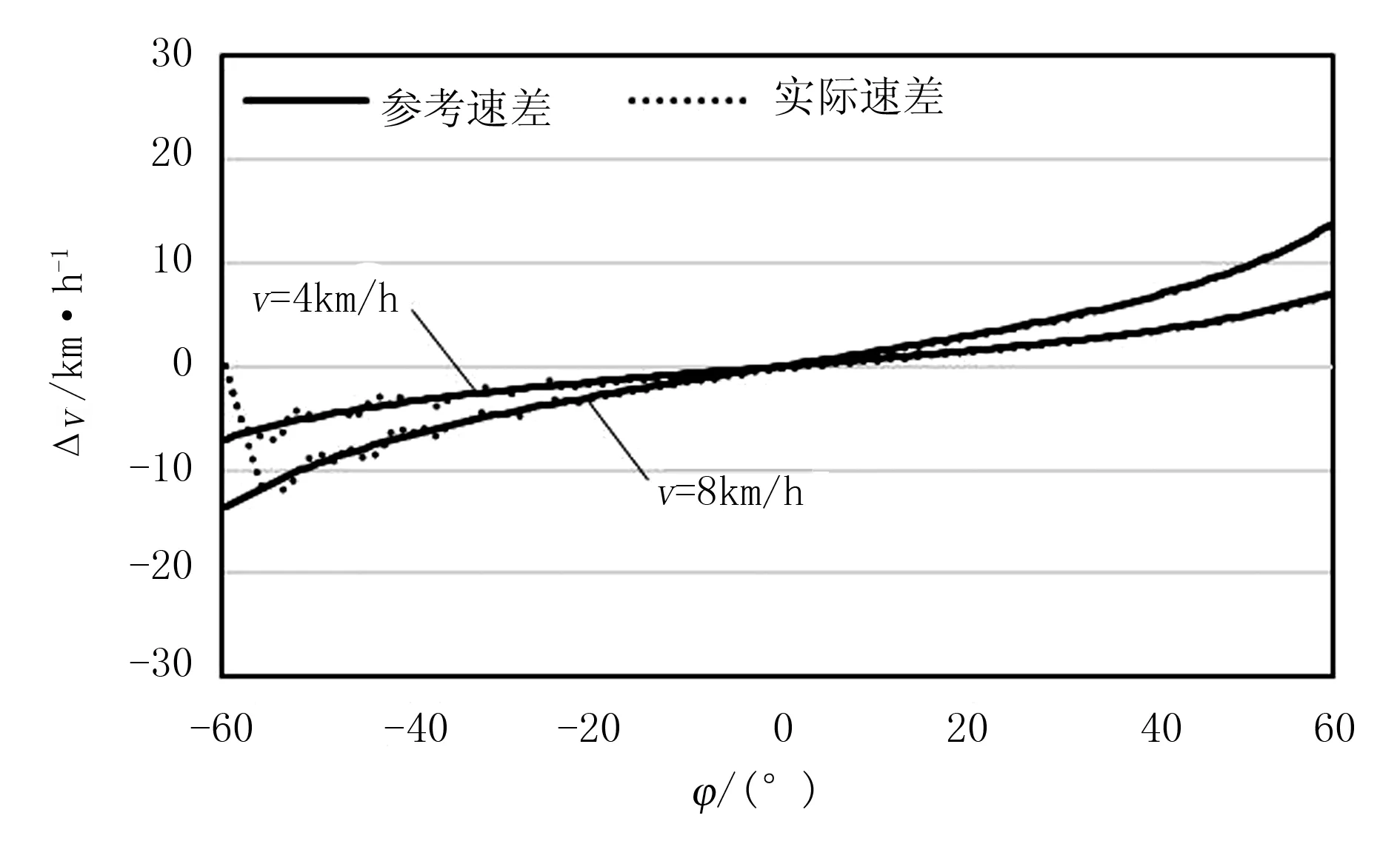
图8 后右轮和后左轮转速随车速和转向角的变化Fig.8 Curves of velocity difference between right and left rear-wheel withdifferent speed and steering angle
从图7和图8可以看出:两侧车轮有明显速差,且随着转速和转向角的持续变大,速差随之越大;后轮的速差要比前轮的速差小,转速变化规律与转速模型一致;实际速差与参考转差在实验从-60°开始运行时误差较大,经过并行PID控制算法的调节,误差逐渐缩小,转速也更加平稳。
5 结论
根据农用移动机器人控制系统模块化和适应能力自主化等要求,创新性建立了三级递阶控制方案,采用主从式CAN总线和串口通信数据传输等功能,建立了基于转速调节的电机转向驱动模型。对该机器人的驱动控制系统进行了控制效果试验,计算机通过数传电台获取了机器人4个电机的实时转速,并与转向模型所计算出来的参考速度做对比,分析了左右电机的转速差曲线。结果表明:该农用轮式机器人移动电机转速达到稳态速度快,且具有较高的转速控制精度。由于利用PID调速方法对电机转速进行闭环控制,农用轮式机器人具有较高的可靠性及容错能力。试验验证表明,此控制方案可行、有效,并得到了成功应用。
[1] 朱磊磊,陈军.轮式移动机器人综述研究[J].机床与液压,2009,37(8):242-247.
[2] 毛罕平,倪静,韩绿化,等.高地隙液压四轮驱动喷雾机转向防滑控制系统[J].农业机械学报,2012,43(6):58-62.
[3] 王建彬,杨宜民,陈建平.改进BELVC的四轮驱动机器人运动控制方法[J].华中科技大学学报:自然科学版,2013,41(1):9-12.
[4]YangHao,VincentC,JiangBin.Optimalfault-tolerantpath-trackingcontrolfor4WS4WDelectricvehicles[C]//TransactionsonIntelligentTransportationSystems.LA:IEEE,2010:237-243.
[5] 王静,张倩,朱晓言,等.基于CAN总线的联合收割机脱粒滚筒测控系统研究[J].农机化研究,2012,34(1):71-75.
[6]ZhaoJie,CuiXindan,ZhuYanhe,etal.Anewreconfigurablemodularroboticsystemwithmultimodelocomotionability[J].InternationalJournal, 2012,4(2):178-190.
[7] 刘和平,严利平,张学锋.TMS320LF240xDSP结构、原理及应用[M].北京:北京航空航天大学出版社,2002.
[8] 高焕文.保护性耕作技术与机具[M].北京:化学工业出版社,2004:119-141.
Design and Experiment of Motion and Control System on the Wheeled Robot
Li Gelun, Cui Tianshi, Liu Chunli, Wang Rui, Wang Lifeng
(College of Electrical and Information, Northeast Agricultural University, Harbin 150030, China)
For poor real-time and accurate control problems of agricultural wheeled robot control system, put forward a system of STM32 as control core, DSP as the motor drive core, based on digital radio and CAN bus communication of embedded control system, adopts innovative three-level hierarchical control scheme for mobile robot modular programming. And uses the ground mobile robot real-time monitoring software platform for mobile robot, the actual running results show that this control system has high reliability and stability, and the system expansion ability.
wheel robot; three-level hierarchical control; CAN bus
2016-12-06
国家“863 计划”项目(810028)
李格伦(1992-),男,黑龙江齐齐哈尔人,硕士研究生,(E-mail)6033662@qq.com。
崔天时(1967-),男,哈尔滨人,副教授,硕士生导师,(E-mail)tscui@neau.edu.cn。
S24;TP242
A
1003-188X(2018)02-0192-05
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16
党的生活(黑龙江)(2020年10期)2020-12-18
湖北农机化(2020年4期)2020-07-24
中国化肥信息(2020年9期)2020-01-20
电子制作(2018年11期)2018-08-04
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
筑路机械与施工机械化(2014年8期)2014-03-01
筑路机械与施工机械化(2014年7期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01
