
基于多LED可见光源的室内位置检测装置设计*
2018-06-04 12:02王建莉
机械工程与自动化 2018年3期
张 总 , 王建莉
(1.兰州工业学院 电气工程学院,甘肃 兰州 730050;2.甘肃交通职业技术学院 ,甘肃 兰州 730050)
0 引言
目前,因采用WIFI、蓝牙、ZigBee等技术和基于时间到达(TOA)、到达时间差(TDOA)、接收信号强度指示(RSSI)等算法的室内定位方案系统复杂、成本高,促使人们探索更低成本及更高精度的室内定位方案。近年来随着可见光通信技术的发展,新一代LED技术得到大规模应用,可见光通信系统可利用室内照明设备代替无线LAN局域网基站发射信号,其通信速度可达每秒数十兆至数百兆,未来传输速度还可能超过光纤通信。可见光通信系统在满足照明要求的同时,凭借低成本、无电磁污染的特点在室内定位方面也显现出优势。本文设计了一种基于多LED可见光源的室内位置检测装置。
1 基于多LED可见光源的室内位置检测系统总体设计
该系统由两大部分组成:大功率LED可见光驱动部分(由LED灯、单片机与电源组成的信息发射控制模块)和可见光接收定位部分(由GY-30数字光强度传感器、STM32系统组成)。此外,系统还包括液晶显示模块、精密恒流源模块以及可见光室内建模等。可见光室内定位装置外形空间为80 cm×80 cm×80 cm的立方结构,顶部装置3个LED灯,底部平面绘制纵横坐标线,系统总体结构如图1所示。
系统工作的关键在于采集并区分3个LED灯的光强信息,以备定位计算。首先,由单片机与电源组成的信息发射控制模块使3个LED灯发出不同频率的可见光,以此区分灯所在的不同区域;再由光强检测传感器获取不同频率可见光光强,依据LED灯所在的特殊位置坐标,结合室内光强与距离的关系,最终计算并完成室内定位。
2 硬件设计
2.1 系统模型
可见光室内定位装置采用A、B、C三个点LED照明,LED布局采用等腰三角形,以便采用三边定位算法的系统,由测试端获得3个互不干扰的参考信号,系统模型如图2所示。
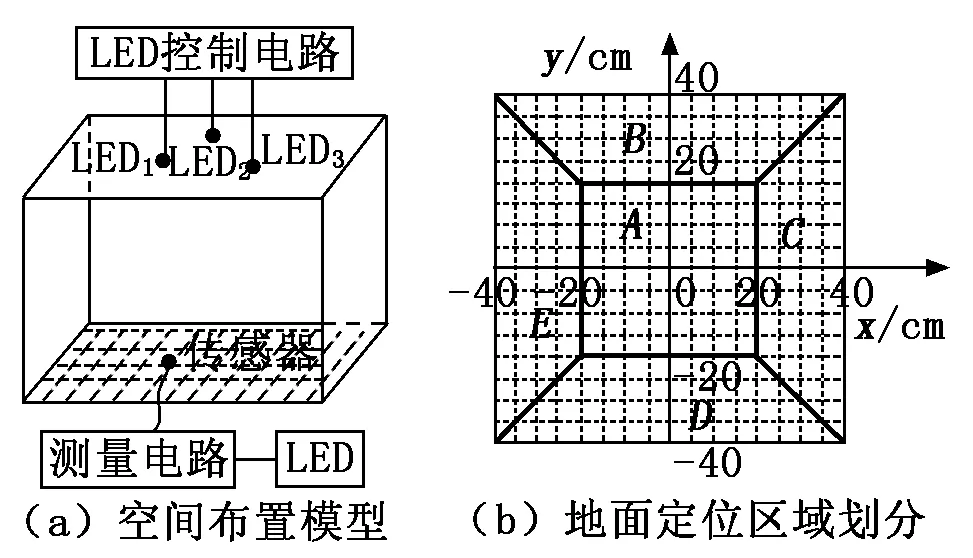
图1 基于多LED可见光源的室内位置检测系统总体结构图

图2 LED安装位置模型
2.2 LED可见光驱动系统
采用圆形集成大功率高亮白光带透镜聚光LED室内照明灯珠,聚光60°;利用51单片机设置LED的ID号并控制LED的闪烁频率,通过51单片机I/O引脚输出到LED驱动电路的信号输入端,完成可见光信号发送。
2.3 光强采集系统
采用1个数字光强度检测模块GY-30作为光照采集系统核心部件。GY-30采用了ROHM原装BH1750FVI芯片,其分光特性和光谱范围与人眼十分接近,光源依赖性强,能够对不同环境的可见光进行精确测量。其内置16 bitA/D转换器,通过串口与微控制器相连接可以直接进行数字输出,省略了复杂的计算和标定,利用其高分辨率可以精确测量传感器当前光照强度,显示所处位置。系统总体框图如图3所示。
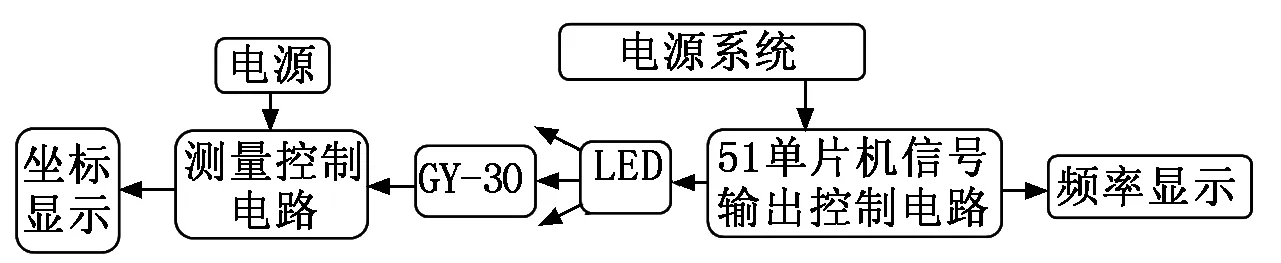
图3 系统总体框图
3 定位原理
定位装置开始工作前先测量出3个LED发射端的坐标,数字光强度检测模块不断采集当前传感器部件的光照强度状态,测得3个LED发射端到待测点间的距离,利用三边定位法即可确定待测点的坐标。设(x1,y1,z1) 、 (x2,y2,z2) 、(x3,y3,z3)为3个LED灯的位置坐标,d1、d2、d3为待测点S到发送端的距离,(x,y,z)为待测点S的坐标,其关系如下:
(1)
设未知点位置为(x,y),令其中的第一个球形的球心坐标为P1(0,0);第二个球形处于相同纵坐标,球心坐标为P2(d,0);第三个球形球心坐标为P3(i,j),3个球形半径分别为r1、r2、r3;z为三球形相交点的水平面高度。则有:
(2)
当z=0时,即为3个圆在水平面上相交为一点,首先解出x:
(3)
式(2)变形后,将式(1)的z2代入式(2),再代入式(3)得到y的计算公式:
4 程序设计
主程序流程图如图4所示。
5 测试结果
(1) 基本功能测试:驱动LED电路工作,将传感器置于B、D、C、E区域任意位置,区分出其位于横纵坐标的哪个区域。测试结果如表1所示。
(2) 高精度区测量精度测试:驱动LED电路工作,将传感器分别置于A、B、C、D、任意区域,记录显示其所在位置坐标值及位于不同位置的最大偏差距离。测试结果如表2所示。

图4 主程序流程图

测试项目测试要求显示1传感器位于B、D区域显示上下区域上2传感器位于C、E区域显示左右区域右
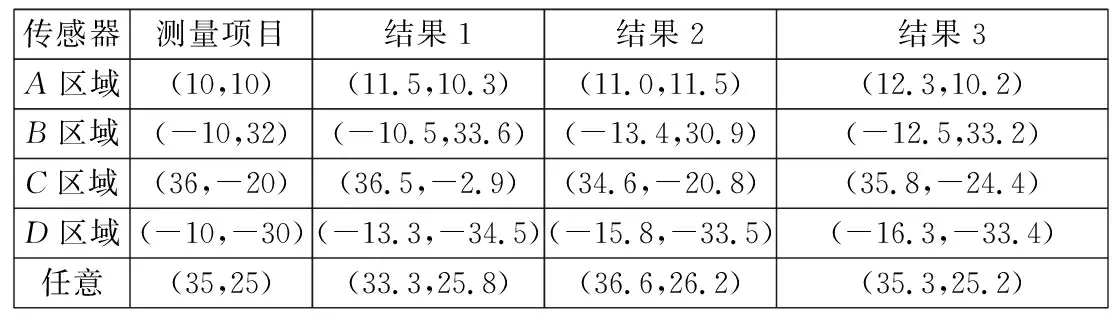
表2 高精度区测量精度测试 cm
(3) 数字信息传输功能测试:在正常照明和定位的情况下,LED控制电路中利用键盘输入阿拉伯数字,记录显示测量电路接收的信息。测试结果如表3所示。
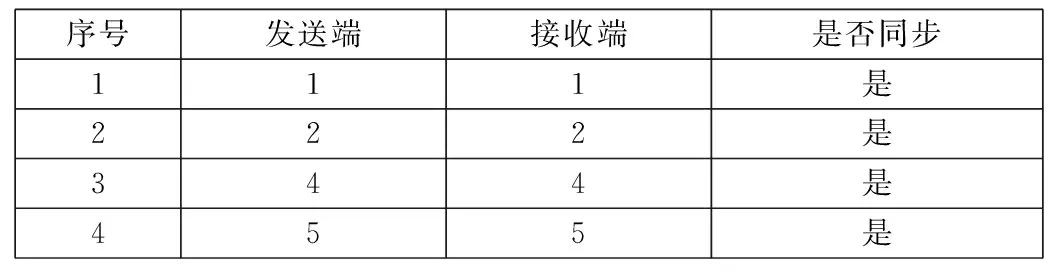
表3 数字信息传输功能测试
6 结束语
本文设计了一种基于LED可见光的室内定位装置,具有功耗低、定位算法简单、成本低等优点,实验数据表明:该装置具有精确定位及一定的信息传送的功能。
参考文献:
[1] 王旭东,胡晴晴,吴楠.高精度室内可见光定位算法[J].光电子·激光,2015,26(5):862-868.
[2] 王云,吴建辉.自由空间光通信系统的设计方法研究[J].广东通信技术,2005(5):41-45.
[3] 刘宏展,吕晓旭,王发强,等.白光LED照明的可见光通信的现状及发展[J].光通信技术,2009,33(7): 53-56.
[4] 丁德强,柯熙政.可见光通信及其关键技术研究[J].半导体光电,2006(2):114-117.
猜你喜欢
机械设计与制造(2023年2期)2023-02-27
汽车实用技术(2021年10期)2021-06-04
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
知识经济·中国直销(2018年3期)2018-04-12
学习月刊(2015年1期)2015-07-11
电子设计工程(2015年15期)2015-02-27
