
一种循迹AGV移动机器人控制系统的设计*
2018-06-04 12:02王洪钢祁宇明
机械工程与自动化 2018年3期
王洪钢,祁宇明
(1.天津城投物业管理有限公司,天津 300113;2.天津职业技术师范大学,天津 300222)
0 引言
AGV移动机器人(Automated Guided Vehicles System)是一种以电池为动力,以磁、光为导航,可以沿着预定轨迹自动化行驶的特种移动机器人。AGV移动机器人可以极大程度地提高柔性制造系统和立体化智能仓库的智能程度,它是现代化生产线和物流线上的执行装置和连接装置[1]。AGV移动机器人广泛应用在制造业中,世界各地的发达国家都极为关注AGV移动机器人关键技术的研发。AGV移动机器人可以作为安装平台嵌入在生产线中,也可以直接用于工厂的运输,有效地降低了生产成本、提高了生产效率[2]。AGV移动机器人逐渐成为柔性制造系统和立体化智能仓库中的核心设备,在码垛、仓储、搬运等作业过程中发挥了有效作用。2013年6月,广州召开了首届“AGV移动机器人应用与产业发展论坛”,着力于推动我国机器人事业的发展,为我国经济的转型升级提供强有力的工具,AGV移动机器人行业将迎来发展的黄金时期。
1 引导方法的分析
磁导式引导方法是目前常用的AGV机器人引导方式,由于磁带的铺设过程比较简单,磁带成本较低,因此磁导式引导具有灵活的运动途径和可靠的运动控制,但是暴露在外的磁带容易受到破坏,同时因为磁带的磁性往往会吸附铁质小物件,进而引起对AGV移动机器人的干扰。
磁导式的引导原理是磁导航传感器根据铺设在路面上的磁条引导AGV移动机器人运行,如图1所示,磁导航传感器一般具有8个或者16个开关量的指示灯,控制器通过判断指示灯的通断来确定AGV移动机器人的偏移量和偏移方向。
2 控制器的电路设计
控制器是AGV移动机器人的大脑,其主要工作是帮助AGV移动机器人解决如何去的问题,本文通过对比市场上常用的控制器最终选用国产某型号的一体机作为AGV移动机器人的控制大脑,一体机采用控制器加显示屏的硬件设施,同时兼备编程控制和人机界面的功能,一体机采用的编程原理类似于三菱PLC控制器,其信号输出为NPN型,即低电平有效的输出方式,一体机的接线原理如图2所示。

图1 AGV移动机器人磁导航传感器
3 步进电机电路设计
本文选择应用86步进电机作为AGV移动机器人的动力源,步进电机的控制需要配合步进电机驱动器,步进电机驱动器通过接收控制器传输的脉冲和频率信号完成对电机速度和距离的控制。步进电机的速度取决于控制器发出的脉冲频率,频率越高则发出脉冲所用的时间就越短,电机的旋转速度就会越快[3]。步进电机的一圈可以划分为360°,电机转一圈需要接收200个脉冲,所以每一个脉冲就会驱动电机运行1.8°,步进电机在大负载的情况下难免会出现丢步现象,所以为了防止电机的精度过低,驱动电路往往增加电机驱动器,步进电机驱动器近一步增加了驱动电机的细分,提高了电机的精度[4]。本文结合电机的电压、功率等因素决定选用型号为MB450B的驱动器,驱动器的接线端口如表1所示,其中,“A+”、“A-”、“B+”、“B-”分别接步进电机的AB两组。
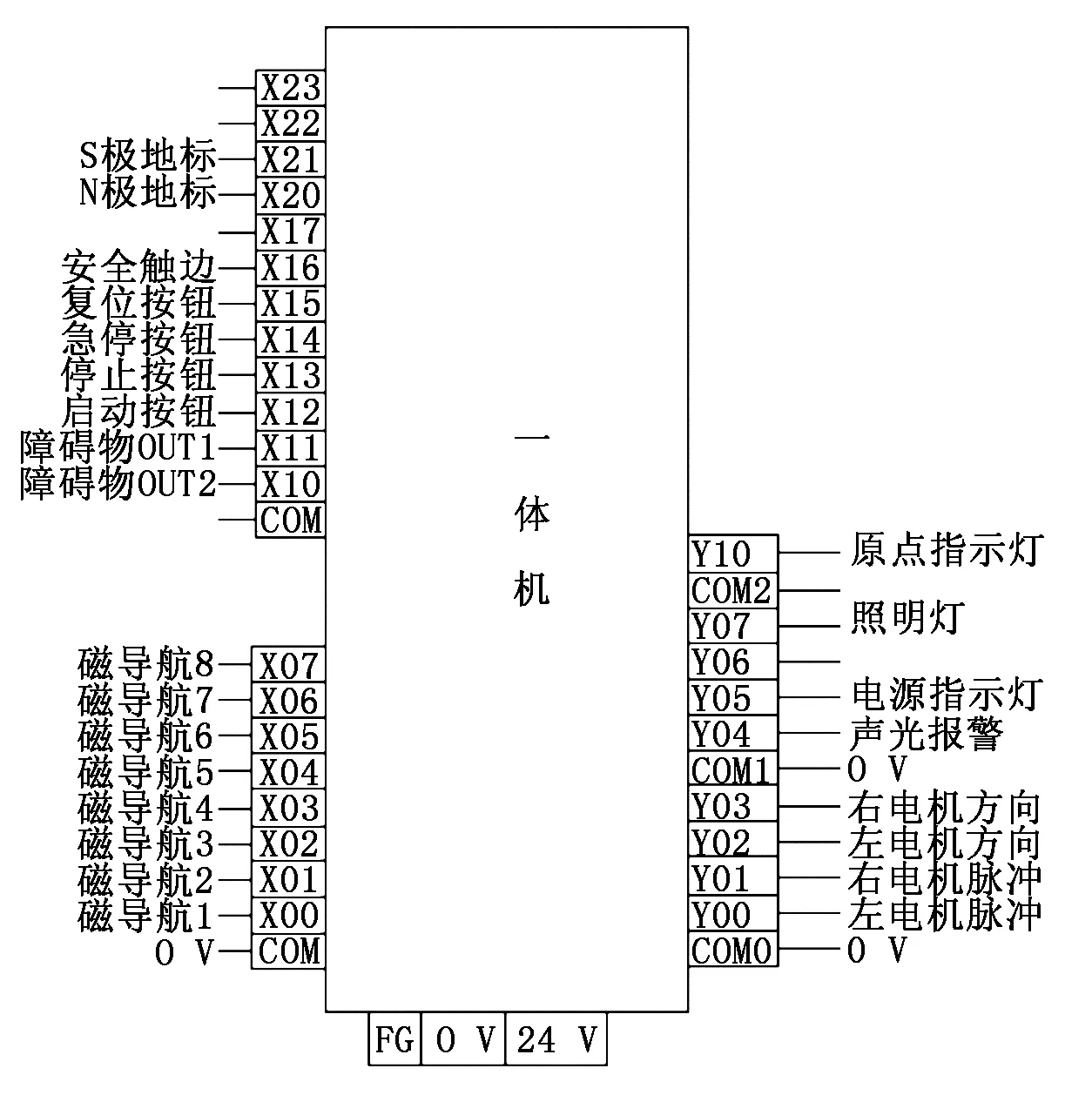
图2 一体机接线原理图
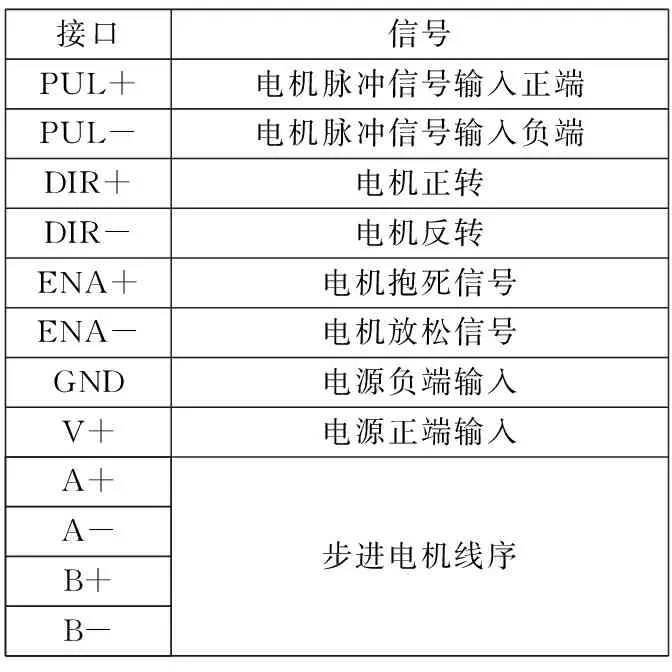
接口信号PUL+电机脉冲信号输入正端PUL-电机脉冲信号输入负端DIR+电机正转DIR-电机反转ENA+电机抱死信号ENA-电机放松信号GND电源负端输入V+电源正端输入A+A-B+B-步进电机线序
4 循迹算法程序设计
AGV移动机器人循迹算法的设计主要包括控制流程图设计(如图3所示)及控制器输入输出I/O点的分配(如表2所示)。
(1) AGV移动机器人启动运行需要有一个启动保护程序,电机从静止到启动需要一定的时间,电机不能瞬间完成加减速,所以在启动程序的设计时需要考虑电机的启动性能,本文针对电机的启动保护使用了斜坡指令RAMP。D0、D1、D2是三个用于储存数据的存储器,其中D0中存储的是初始值,D1中存储的是目标值,如果触点M0得电后, D1的数据就会被D0覆盖,D2的数据是个变量,在N个扫描周期中,D2的数据逐渐从D0变化到D1的数值,同时特殊辅助继电器M8026被置1,D2的数据逐渐从D0变化到D1所用的时间是由D8026存储器存储的数据决定的。步进电机保护启动梯形图如图4所示。
(2) AGV移动机器人在循迹过程中,遇到交叉的路况就需要转弯,AGV移动机器人的转弯方式比较多,比较常用的是差动转弯和差速转弯。所谓差动转弯是两轮的转向不一样,一个轮子正传,另外一个轮子反转;差速转弯是两轮的转动方向一致但是转速不一致。

图3 AGV移动机器人控制流程图

输入功能输出功能X001路信号Y00左脉冲信号X012路信号Y01右脉冲信号X023路信号Y02左方向信号X034路信号Y03右方向信号X045路信号Y04报警指示灯X056路信号Y05电源指示灯X067路信号Y07照明灯X078路信号Y10原点指示灯X101区障碍物信号X112区障碍物信号X12运行X13停止X14急停X15复位X16防护传感器X20N极X21S极

图4 步进电机保护启动梯形图
AGV移动机器人的循迹过程是一个自动校正的过程,磁导航传感器在机器人运行过程中每分每秒都
在监控机器人是否偏移预设轨迹,一旦发现轨迹发生偏移,控制器就会根据机器人偏离轨道的程度做出相应的调整,控制器中预留两个存储器用来存放左右电机的脉冲频率。转弯、直行程序如图5所示。
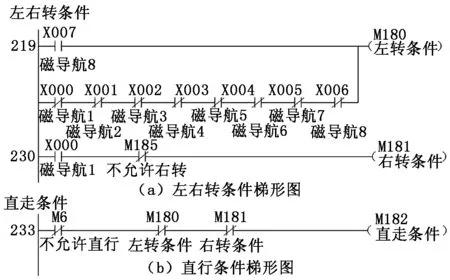
图5 循迹算法的控制器程序
5 总结
在我国产业经济再升级,打造智能制造的产业结构的大背景下,我国的传统生产线和物流线上的劳动力开始被智能机器人所替代,取而代之的是柔性制造系统和立体化智能仓库。我国的生产工厂正朝着智能化、自动化的方向发展。本文以实际的AGV移动机器人设计为案例,提出了一整套的AGV移动机器人控制程序的编写方法,对于同类系统的开发具有一定的参考价值。
参考文献:
[1] 张辰贝西,黄志球.自动导航车(AGV)发展综述[J].中国制造业信息化,2010(1):53-59.
[2] 陈宁宁,李明,陈姗.大力发展生产物流 提高烟草制造业竞争力[J].科技和产业,2007(4):67-69.
[3] 李辛.基于无线定位的AGV导航、控制研究及模拟系统的研制[D].长春:吉林大学,2006:32-35.
[4] 王登贵,杨中平,胡真明,等.基于PLC的四相步进电机控制方法及实现[J].微计算机信息,2006(34):36-37,45.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
北京航空航天大学学报(2022年6期)2022-07-02
制造技术与机床(2017年3期)2017-06-23
电子制作(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07
汽车维修与保养(2014年12期)2014-04-18
自动化博览(2014年12期)2014-02-28
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
汽车维护与修理(2014年10期)2014-02-28
