
基于Halbach阵列可控磁通电机的安全控制研究
2018-06-04 02:28:53杨德良王心坚
微特电机 2018年5期
杨德良,王心坚
(1.同济大学,上海 201804;2.上海燃料电池汽车动力系统有限公司,上海 201804)
基于Halbach阵列可控磁通电机的安全控制研究
杨德良1,2,王心坚1
(1.同济大学,上海 201804;2.上海燃料电池汽车动力系统有限公司,上海 201804)
摘 要:针对新能源汽车的控制安全问题,研究了基于Halbach阵列可控磁通电机,采用三相对称短路法的安全控制策略。研究表明,三相对称短路对于基于Halbach阵列可控磁通电机,在中高速段直轴退磁电流符合电机磁通调节需求,具有有效的退磁作用,使得驱动电机由驱动状态向安全状态转变,获得较好的制动转矩抑制作用,并有效降低高速段反电动势,实现电机的安全控制。
关键词:可控磁通;永磁同步电动机;三相对称短路;电安全;转矩安全
0 引 言
近年来,汽车工业特别是新能源汽车发展迅速,而以永磁同步电动机(以下简称PMSM)控制为核心的电驱动系统,已部分或完全取代发动机移植到汽车中,决定汽车的动力性和操稳性[1-3]。PMSM具有较好的转矩特性、高效率、高功率密度等优点,其机械特性更接近汽车的动力需求,省略复杂的换挡机构,以电机工作转速范围配以简单的变速机构来覆盖车辆行驶转速需求,是目前车用电机的主流[4-5]。
同时,新能源汽车电驱动系统的电安全性和转矩安全问题成为新能源汽车安全性的一个主要问题[6-7]。在实际车辆运行工况中,驻车制动、起步、加速、爬坡、高速巡航等,需要车辆具有充足动力性的同时也具有良好的安全性,驱动电机或处于驱动状态,或处于安全状态,并伴随着相应磁场调节操作。新能源汽车驱动系统有很多潜在故障发生,比如碰撞安全事故、动力电池、燃料电池电堆、电机及其驱动系统等动力总成系统严重故障。在车辆系统失效或电机不工作等情况下,一方面,驱动侧的高压系统的过电压,危及逆变器功率器件的安全,存在电安全隐患;另一方面,三相对称短路或非对称短路故障发生时,可能导致永磁体不可逆退磁,短路过程瞬间电机本身产生较大的制动转矩,对车辆操稳性影响较大,从而存在转矩安全问题。
基于传统PMSM的短路分析,国内外很多学者做了专题研究。威斯康星-麦迪逊大学Brian A.Welchko,Gilsu Choi等[8-9]对IPMSM三相对称和单相非对称短路故障条件下的短路特性进行了研究,并指出由单开关和线间短路故障引起的不对称性显著提高了退磁风险。意大利Nicola Bianchi等[10]在电动助力转向(EPS)的容错IPMSM电机的设计中,在三相对称短路稳态分析的基础上,给出了故障电机稳态直轴短路电流和产生的电磁转矩,研究了最大制动转矩和电机参数之间的关系。国内方面,一汽车的暴杰等[11]在PMSM三相短路稳态分析的基础上,给出了在电动汽车上应用需求分析的案例。
本文基于PMSM三相对称短路特性分析,通过对Halbach阵列车用可控磁通电机空载磁场和充退磁分析,并对试验样机进行三相对称短路安全控制试验和分析,给出了基于三相对称短路法的可控磁通电机的安全控制策略。
1 PMSM三相对称短路特性
在d-q坐标系下的数学模型磁链方程和电压方程:
(1)
进入短路前一时刻的交直轴电流(Id0,Iq0)为初始条件,三相对称短路时,满足约束条件:
(2)
1.1 PMSM三相对称短路动态特性
1.1.1 PMSM三相对称短路动态特性
联立式(2)微分方程组,可得二阶微分方程:
(3)
当永磁电机旋转电角速度ω>ωr时,ωr为瞬态特征转速值:
(4)
上述二阶微分方程具有如下形式的解:
id(t)=e-αt[C1cos(βt)+C2sin(βt)]+C3
(5)
式中:α为衰减因子,即:
(6)
(7)
求解为:
(8)
式中:γ(Id0,Iq0)为三相对称短路过程中d,q轴电流初始条件(Id0,Iq0)、最终稳态短路电流(Idsc,Iqsc)的矩阵,并与电机瞬态转速ω、凸极系数ξ、电机电参数(Rs,Ld,Lq)等有关:
(9)
(10)
(11)

三相对称短路过程中d轴电流能达到的最小峰值是导致不可逆退磁的主要因素:
Id,min=Idsc-
(12)
当Id0=0,Iq0=IN时:
Id,min=Idsc-
(13)
1.1.2 PMSM三相对称短路理想动态特性
在分析三相对称短路瞬态过程时,如果忽略绕线电阻影响,即Rs=0时,由式(4)~式(7)可知,ωr=0,α=0,β=ω,说明忽略绕线电阻影响时的短路瞬态过程,短路特征转速值ωr为零,衰减因子α为零,电流角频率β与电机电角速度ω一致的理想短路瞬态工况。
由式(10)、式(11)可知,此时:
(14)
式(14)表明理想短路瞬态工况下最终稳态d轴电流Idsc幅值为系统特征电流,q轴电流Iqsc幅值为0。
则式(8)、式(9)简化:
(15)
(16)
d轴电流能达到最小峰值:
(17)
当Id0=0,Iq0=IN时:
(18)

根据某A0级车用45 kW IPMSM静态电参数,计算三相对称短路的d-q轴电流动态关系如图1所示。当忽略绕线电阻时,理想情况下三相对称短路的d-q轴电流的动态关系如图1中实线椭圆所示。
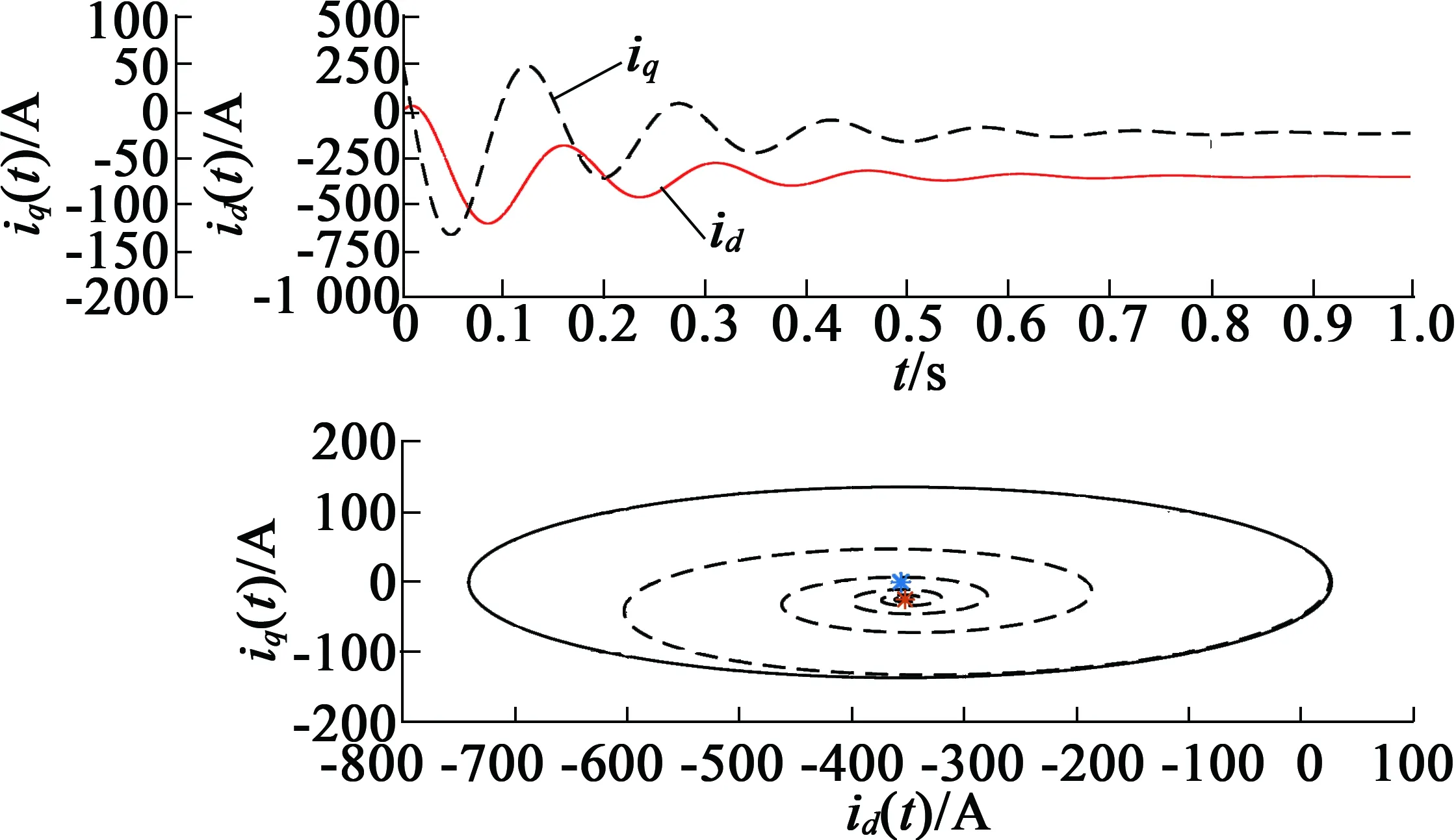
图1 三相对称短路d-q轴电流动态特性
1.2 PMSM三相对称短路稳态特性
由式(10)、式(11)可得稳态电磁转矩方程和稳态短路电流分别如下:
(19)
(20)
基于45 kW 的IPMSM参数可得出三相对称短路下稳态短路电流、稳态制动转矩与电机转速的关系,如图2所示。
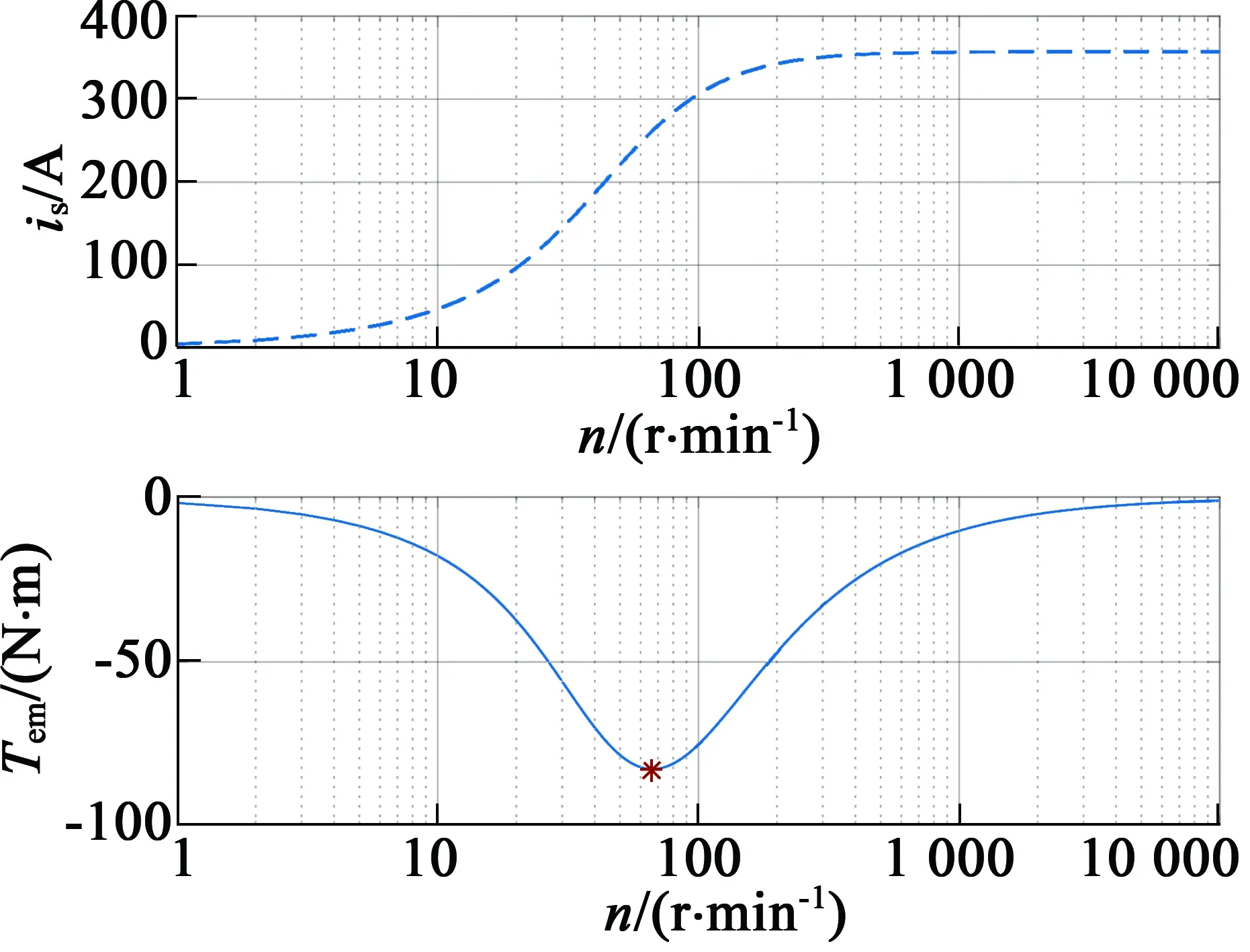
图2 短路电流、制动转矩与电机转速关系
由图2可知,三相对称短路时,稳态短路电流随转速升高单调增大,很快达到最大并趋于稳定。
式(20)中,当ω4远远大于其它量的幅值,取极限可得:
(21)
最大稳态短路电流值恰好与特征电流值相等,在中高转速范围内,主要由磁链ψf和直轴电感Ld参数值决定。
制动转矩大小与速度的对数坐标关系如图2所示,在某一速度点达到最大制动转矩值,稳态短路转矩绝对值大小随转速ω上升不断减小并趋于零。根据Nicola Bianchi等[10]研究的最大制动转矩和电机参数之间的关系,最大转矩输出发生的转速点ωpk:
(22)
三相对称短路的稳态制动转矩最大:
(23)
式中:χ为凸极系数ξ相关的常数因子,f(ξ)是凸极系数ξ的函数:
(24)
(25)
ξ越大,相应的f(ξ)也越大,由式(23)可知,三相对称短路最大制动转矩Tem也越大;最大制动转矩发生的转速点ωpk由定子相电阻Rs,交轴电感Lq决定;Tem大小由电机磁极对数p,磁链ψf和交轴电感Lq决定。
2 Halbach阵列可控磁通电机及磁场分析
2.1 Halbach阵列车用可控磁通电机结构
Halbach永磁阵列的概念最早由美国劳伦斯伯克利国家实验室的Klaus Halbach教授提出[12],本文研究电机模型采用6极36槽、Y型连接双层叠绕组的Halbach阵列可控磁通PMSM。如图3所示,三段式类Halbach阵列形式,铝镍钴永磁体处于直轴位置,有利于采用直轴电流Id对其磁通状态进行控制,同时在采用Id=0控制的驱动状态时,交轴电流Iq对铝镍钴永磁体影响较小,保证电机磁场在非磁通调节状态时候的稳定性。该电机模型充分利用了隔磁结构的特性,减小电机状态改变磁通控制所需的控制电流。

图3 6极36槽Halbach阵列可控磁通PMSM
电机模型技术数据如表1所示。

表1 6极36槽可控磁通PMSM技术参数
2.2 Halbach阵列可控磁通电机空载磁场
空载时,电机驱动状态下,铝镍钴正向充磁,为助磁状态,其充磁方向沿径向方向向外;电机安全状态下,铝镍钴反向充磁,为退磁状态,充磁方向沿径向方向向内。
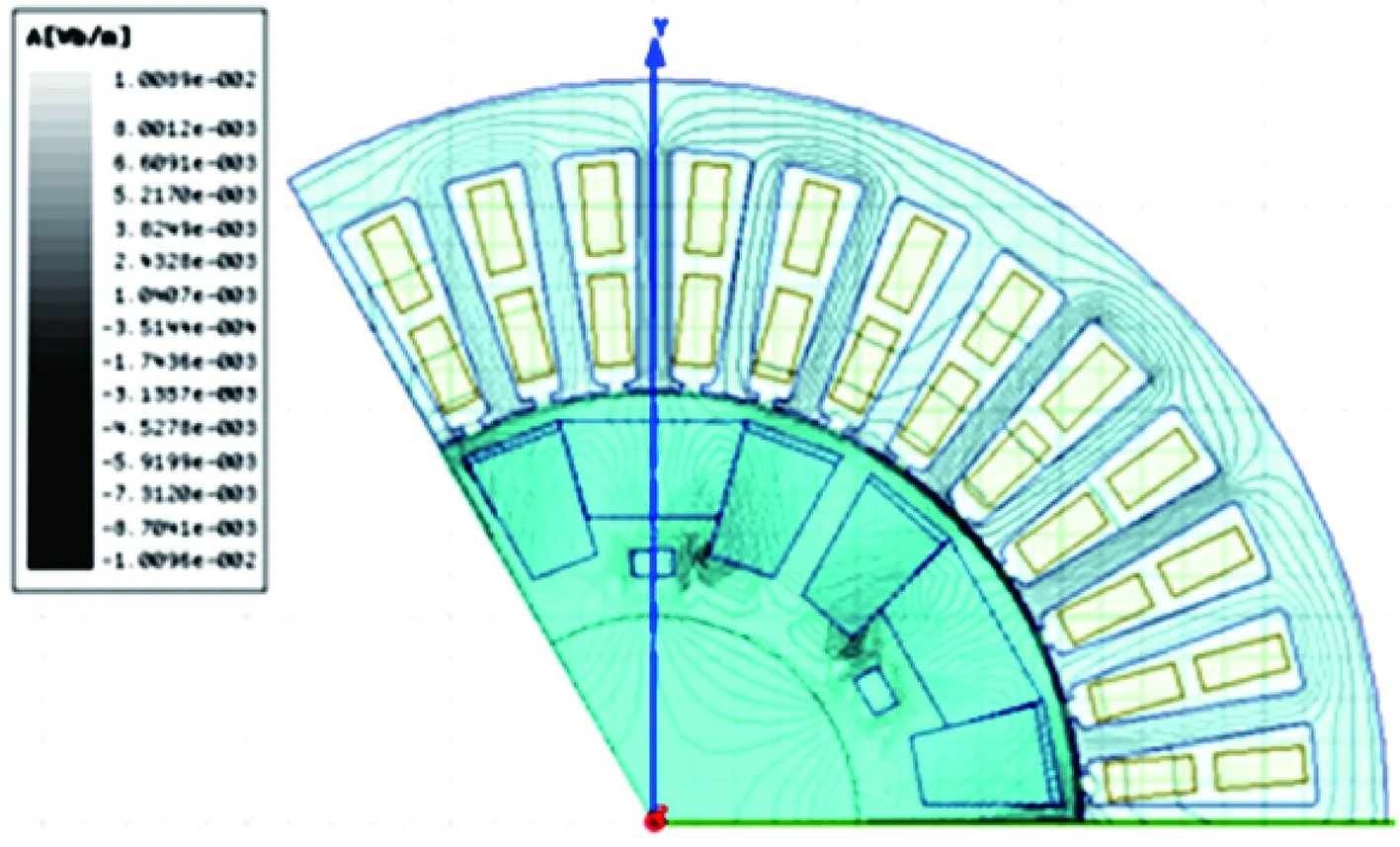
Halbach阵列可控磁通电机空载磁力线分布如图4所示。铝镍钴助磁状态下,由图4(a)可以看出,由于钕铁硼上部的隔磁结构的存在,正向充磁的铝镍钴起到将对角充磁的钕铁硼产生的磁通导向定子侧作用,增强永磁主磁通,铝镍钴永磁体在同方向被强磁化后,电机永磁主磁通最强且稳定性良好,车辆具有较好的动力性能;铝镍钴退磁状态下,由图4(b)可以看出,由于钕铁硼上部的隔磁结构的存在,反向充磁的铝镍钴永磁体将钕铁硼永磁体磁通在转子内部短路,起到将永磁主磁通减弱的作用,铝镍钴永磁体反方向被强磁化后,电机永磁主磁通最弱,保证车辆系统的安全性能。

(a) 助磁状态

(b) 退磁状态
2.3 Halbach阵列可控磁通电机充退磁场
采用Id电流对磁通控制过程的电机磁力线分布如图5所示。在电机驱动状态,采用半载负向d轴电流(6.5 A/mm2,-175 A)去磁,如图5(a)所示。在钕铁硼磁通的作用下,铝镍钴基本已经反向充磁。在移除Id电流后,铝镍钴保持反向充磁的磁通状态,电机由驱动状态改变为安全状态;在电机安全状态,使用满载正向d轴电流(13 A/mm2,350 A)充磁,如图5(b)所示。铝镍钴永磁体的大部分面积已经改变为助磁状态。由于两种隔磁结构引起的变磁路特性,能够使满载的磁通电流将退磁状态的铝镍钴的磁通完全改变到助磁状态,在移除磁通控制电流,铝镍钴保持助磁状态,电机改变到驱动状态。
(a) 半载去磁

(b) 满载充磁
在传统PMSM驱动系统中,三相对称短路过程中,将产生较大的制动扭矩和短路电流,短路电流瞬态值表现为较大的直轴退磁电流Id,min,可能致使电驱动系统不可逆失效。在可控磁通电机安全控制中,三相对称短路过程中Id,min是产生铝镍钴永磁反向充磁(即退磁)的主要因素,具有动态退磁作用,促使电机由驱动状态转为安全状态。因此,在车辆发生严重故障时可有效利用可控磁通电机的三相对称短路作为安全工作模式,降低行车安全风险。
3 Halbach阵列可控磁通电机控制安全特性试验
在可控磁通电机安全控制试验中,根据式(13)的表述,在电机处于初始驱动状态(Id0=0,Iq0=IN)下,可设定不同的q轴初始状态电流IN,在不同的转速下,分析电机由驱动状态转为安全状态的影响因素,考察可控磁通电机三相对称短路动态退磁特性,稳态制动转矩特性,稳态短路电流特性等变化规律。采用三相对称短路法的控制安全特性试验中,转换瞬态过程如图6所示,电机三相短路后,Id,Iq进入了衰减振荡过程,直轴电流出现最小值Id,min而后进入稳态Idsc,稳态交轴电流Iqsc接近0。

图6 三相对称短路法试验Id,Iq转换瞬态过程
3.1 可控磁通电机三相对称短路动态退磁特性分析
三相对称短路过程中,最大d轴短路电流Id试验数据如图7所示。在转速3 000 r/min以下,d轴短路电流随转速升高单调增大,受初始电流IN影响较小,转速3 000 r/min以上,幅值增加趋势放缓,d轴最大峰值短路电流在120~150 A。
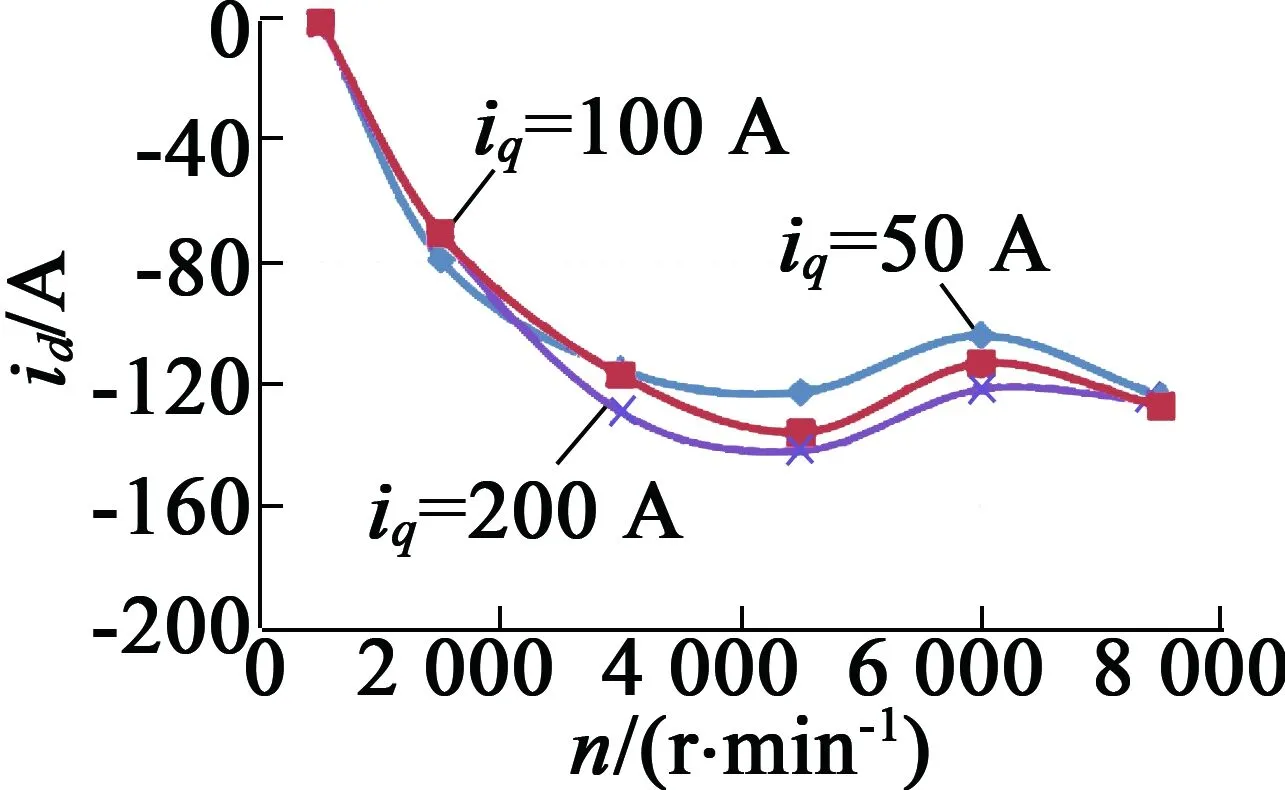
图7 可控磁通电机最大d轴电流-转速曲线
试验测得的三相对称短路后的反电动势随转速的变化关系,如图8所示。
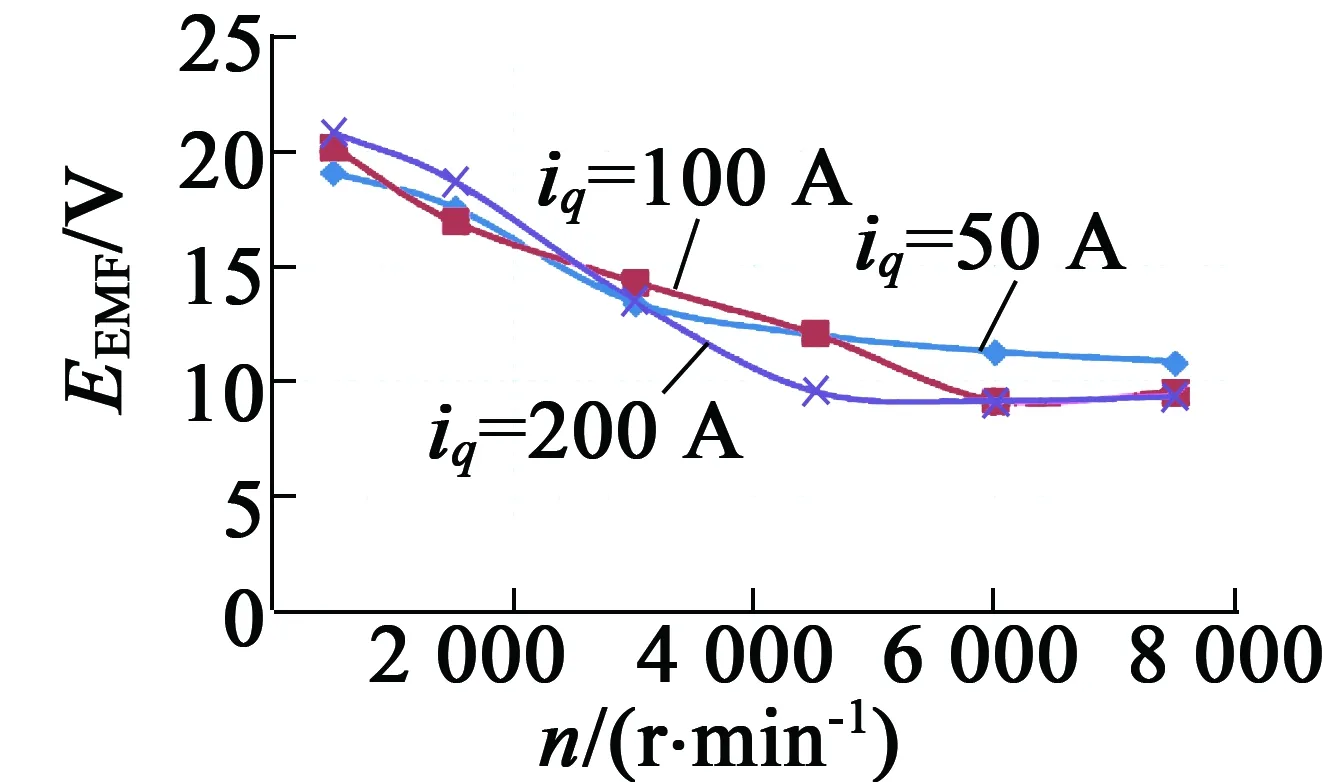
图8 可控磁通电机短路反电动势-转速曲线
基于三相对称短路的可控磁通电机安全控制具有有效的退磁作用,驱动电机由驱动状态向安全状态转变,有效降低中高速段反电动势,有利于电安全和转矩安全的实现。
3.2 可控磁通电机安全状态的稳态短路特性分析
3.2.1 可控磁通电机三相对称短路稳态转矩特性
可控磁通电机三相对称短路的稳态转矩的试验结果如图9所示。

图9 可控磁通电机稳态制动转矩-转速曲线
与传统PMSM类似,稳态制动转矩在低速区存在最大制动转矩极值点,随转速上升而衰减并最终趋于零,最大稳态制动扭矩出现在转速1 500~2 000 r/min,幅值较低,为13~15 N·m。
由式(22)~式(25)可知,对于极对数固定的试验样机来说,最大制动转矩Tem大小,主要受永磁磁链ψf影响,ψf越小,Tem就越小。
3.2.2 可控磁通电机三相对称短路稳态电流特性


图10 可控磁通电机稳态短路电流-转速曲线
4 结 语
本文主要针对新能源汽车的电安全问题及转矩安全问题,以可控磁通PMSM为核心的电驱动系统,基于三相对称短路的瞬态特性和稳态特性的理论分析,通过安全控制试验,对可控磁通电机试验样机的三相对称短路动态退磁特性、稳态制动转矩特性、稳态短路电流特性等进行分析,给出基于三相对称短路法的可控磁通电机退磁状态的控制安全策略。
对可控磁通电机三相对称短路动态退磁特性进行了试验数据分析。在中高速段,具有有效的退磁作用,驱动电机由驱动状态向安全状态转变,从而获得较好的制动转矩抑制作用,并有效降低高速段反电动势。
对可控磁通电机三相对称短路稳态转矩和稳态短路电流特性进行了试验数据分析。稳态转矩的试验结果显示,可控磁通电机的最大稳态制动转矩出现在转速 500~2 000 r/min,幅值为13~15 N·m,处于较低的水平;稳态短路电流随转速升高单调增大,最大短路电流在30~50 A,处于较低的水平。
研究结果表明,基于Halbach阵列可控磁通电机,采用三相对称短路法的安全控制方式,在中高速段具有有效的退磁作用,驱动电机由驱动状态向安全状态转变,以较低的最大短路电流,获得较好的制动转矩抑制作用,并有效降低高速段反电动势,实现电机的安全控制。
[1] 陈辛波,杭鹏,王叶枫.电动汽车轻量化技术研究现状与发展趋势[J].汽车工程师,2015(11):23-28,57.
[2] 林仕供.电动汽车常用驱动电机类型的特性及选型分析[J].汽车实用技术,2014(12):46-48.
[3] 甄子健,陈潇凯,林逸,等.异步驱动电机扭矩波动对电动汽车纵向冲击影响的仿真研究[J].高技术通讯,2007,17(8):840-844.
[4] 王晓远,高鹏,赵玉双 等.电动汽车用高功率密度电机关键技术[J].电工技术学报,2015,30(6):53-59.
[5] 杨丽,刘小芳.永磁同步电机已成为新能源车主流电驱动核心[J].稀土信息,2016(10):26-27.
[6] 苟亚凤,钟再敏,王心坚,等.新能源汽车电驱动系统失效电安全与转矩安全分析[J].微特电机,2013,41(11):22-26, 29.
[7] MEHDI T,ABOLHASSANI,HAMID A.Fault tolerant permanent magnet motor drives for electric vehicles[C]//International Electric Machines & Drives Conference IEEE,2009:1140-1146.
[8] BRIAN A,WELCHKO,THOMAS M,et al.IPM synchronous machine drive response to symmerical and asymmetrical short circuit faults[J].IEEE Transactions on Energy Conversion,2003,18(2):291-298.
[9] CHOI,GILSU,JAHNS,T.M.Interior permanent magnet synchronous machine rotor demagnetization characteristics under fault conditions[C]//Energy Conversion Congress & Exposition.IEEE,2013:2500-2507.
[10] BIANCHI N,PRE M D,BOLOGNANI S,et al.Design of a fault-tolerant ipm motor for electric power steering[J].IEEE Transactions on Vehicular Technology,2006,55(4):1102-1111.
[11] 暴杰,赵慧超,董秀辉,等.电动车用永磁同步电机的三相短路稳态分析与应用[J].微特电机,2014,42(3):17-20.
[12] HALBACH K.Conceptual design of a permanent quadruples magnet with adjustable strength[J].Nuclear Instruments & Methods in Physics Research,1983,206(3):353-354.
ResearchonSafetyControlBasedonHalbachArrayControllable-FluxMotor
YANGDe-liang1,2,WANGXin-jian1
(1.Tongji University,Shanghai 201804,China;2.Shanghai FCV Powertrain System Co., Ltd.,Shanghai 201804,China)
Abstract:As to the control safety problem of new energy vehicles, a safety control strategy based on Halbach array structure controllable-flux motor and three-phase symmetrical short-circuit method was analyzed. The research showed that for the controllable-flux motor based on Halbach array, the three-phase symmetrical short circuit method could be used in the middle and high speed range. The demagnetization current in the direct axis conformed to the requirement of flux adjustment. With effective demagnetization, the driving motor was changed from a driving state to a safe state to obtain a better braking torque restraining effect. The back-EMF of the high speed section was effectively reduced and safe control of the motor was realized.
Key words:controllable-flux; permanent magnet synchronous motor (PMSM); three-phase symmetrical short circuit; electrical safety; torque safety
中图分类号:TM351
A
1004-7018(2018)05-0001-05
2017-12-25
国家重点基础研究发展计划项目(973计划)(2011CB711205)
作者简介:杨德良(1976—),男,硕士,电机控制工程师,主要从事新能源汽车电机驱动及控制的研究工作。
