
基于高频注入的永磁同步电动机直轴正方向判定
2018-06-04 02:29薛迎春
微特电机 2018年5期
薛迎春
(苏州工业职业技术学院,苏州 215104)
基于高频注入的永磁同步电动机直轴正方向判定
薛迎春
(苏州工业职业技术学院,苏州 215104)
摘 要:针对永磁同步电动机脉振高频注入法估计直轴正方向判定存在180°电角度误差的问题,提出一种基于脉振高频注入的电机估计直轴正方向判定与补偿方法。在初次得出直轴位置估计的基础上,考虑4个导致位置估计失败的转子初始位置角,通过改变它的初始位置估计给定,维持系统正常运行。利用不同磁极下(N极和S极)去磁和增磁效应导致的定子直轴等效电路时间常数不同的特点,判定实际直轴正方向,对初始位置估计角进行有效电角度补偿。实验结果验证了该估计直轴正方向判定方法的有效性。
关键词:永磁同步电动机;脉振高频注入;估计直轴正方向;位置补偿
XUEYing-chun
0 引 言
永磁同步电动机(以下简称PMSM)控制大多采用位置传感器获取转子位置信息,考虑到减小控制装置大小、降低成本,以及系统的后期维护和可靠性问题,需摒弃传统位置传感器,实现PMSM无位置传感器控制。目前,PMSM无位置传感器中高速段基本可以较好地运行,但在起动和低速段由于反电势过小,无法通过其精确估计转子位置,导致PMSM在起动以及低速段控制性能明显不如中高速段。如何提高起动以及低速段转子位置估计精度已成为PMSM无位置传感器控制的共性问题。
近年来研究人员提出多种位置估计方法:R. Akimatsu等人提出一个稳定控制系统的逆变器模型和谐波电流模型的PMSM无位置传感器控制系统,所提出的无传感器控制系统扩大了高速驱动区域[1];文献[2-3]基于转子凸极跟踪,采用高频脉动载波信号注入法,加快转子初始位置检测速度;H. Lee给出一种迭代滑模观测器用于加强PMSM无传感器控制的变参数鲁棒性,速度和转子位置估计比传统的自适应算法更快[4];文献[5]提出一种在整个速度范围内具有2个自由度的电流控制方案,获得高品质的位置误差信号跟踪控制;文献[6]提出一种频率自适应干扰观测器,以消除定子磁链的估计干扰,从而提高转子角估计的准确性;文献[7-8]将传统常值切换滑模算法应用于反电势观测器中,转子位置以及转速估计能够很好地跟随实际值,对控制对象的参数扰动具有较强的自适应能力。对于高频注入法,文献[9]基于测试矢量励磁及电流幅值比较实现转子初始位置检测,文献[10]在此基础上对其进行了改进,检测误差有所减小;文献[11]通过向电机α-β轴注入高频电压后,从电流响应中提取出转子位置信息。除此之外,高宏伟等人研究一种基于载波频率成分法的无位置传感器控制策略用来检测转子初始位置[12],于艳君等对其进行了相应的误差分析[13],提高检测位置的精确度。
本文针对PMSM起动以及低速段脉振高频电压注入法估计直轴正方向判定存在180°电角度误差的问题,提出一种基于脉振高频电压注入的估计直轴正方向判定与补偿新方法。利用不同磁极下(N极和S极)的去磁和增磁效应影响导致的定子直轴等效电路时间常数不同的特点,判定实际直轴正方向。实验结果验证了本文方法的有效性和实用性。
1 直轴位置初次估计原理
表贴式PMSM两相旋转坐标系下的电压方程:
(1)
式中:Zd,Zq分别为d,q轴的阻抗。


图1 永磁同步电动机各坐标系关系图
根据图1可得估计两相旋转坐标系下的电流响应:



(3)
(4)
(5)
(6)

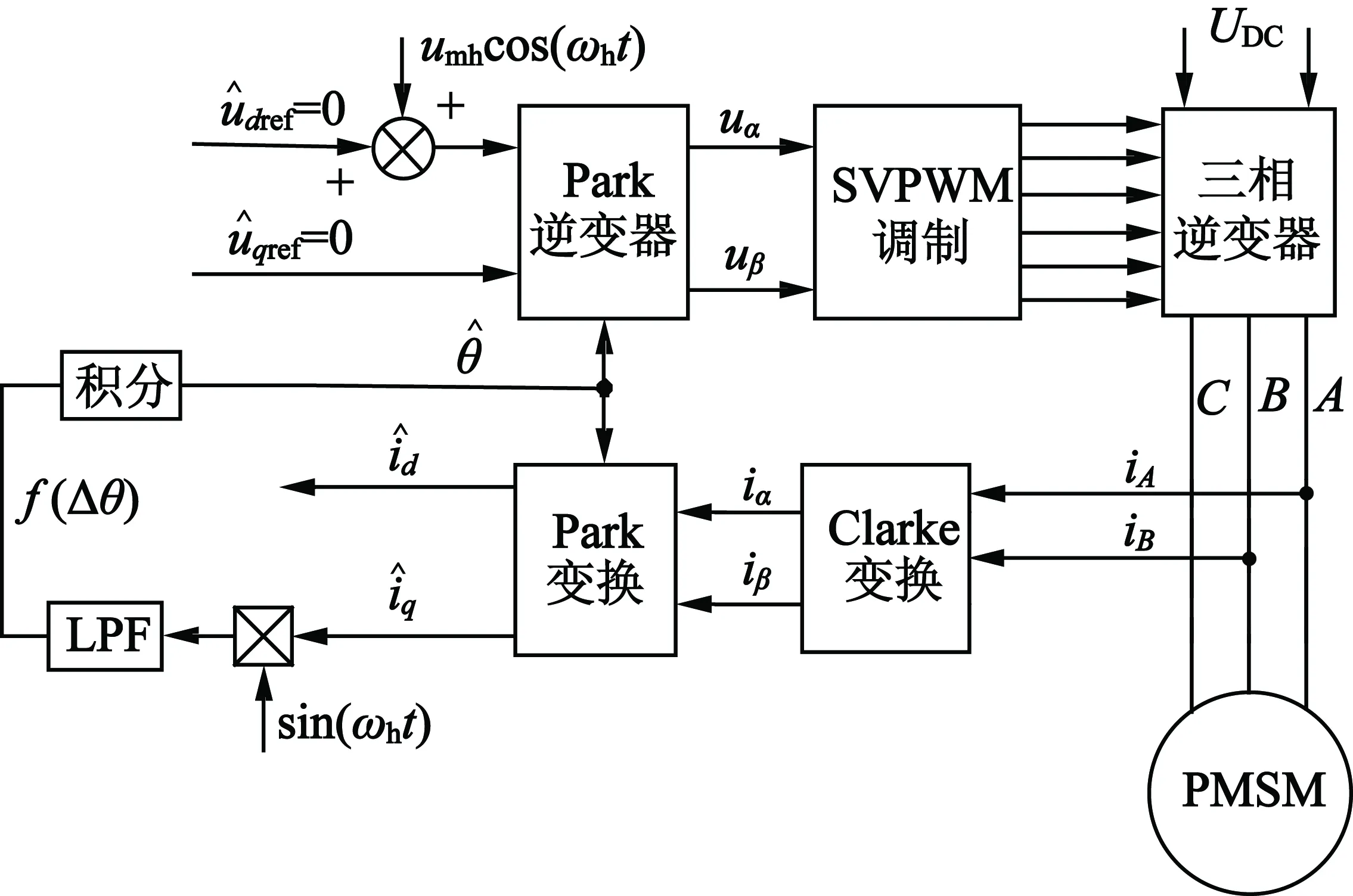
图2 直轴位置初次估计系统控制框图

sin(2Δθ)sin(ωht)=
LPF[sin(ωht-φd-φq)sin(ωht)〗=
ksin(2Δθ)
(7)
2 直轴位置初次估计收敛性分析
根据式(7),使得f(Δθ)=0成立的条件不仅仅只有Δθ=0,当Δθ=π/2,Δθ=π,Δθ=-π/2时同样成立。因此需对实际不同直轴位置的初次位置估计值收敛情况进行分析。



综上所述,直轴位置估计初始值给定为零时的直轴位置初次估计收敛特性表如表1所示。
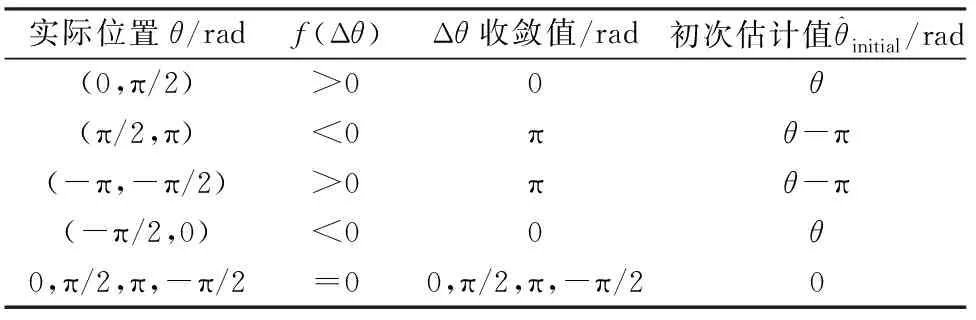
表1 直轴位置初次估计收敛特性
由表1可知,当实际电机转子位置处于0,π/2,π,-π/2这4个特殊位置角度时,估计系统初次位置估计均为零,系统运行失效。因此,针对此问题对该系统进行如下改进,具体步骤如下:

2) 改变直轴位置估计初始值为a(a为常数且不等于特殊位置值),使得sin(2Δθ)≠0,从而f(Δθ)不恒为零;

3 估计直轴正方向判定与补偿
为解决上述初次直轴位置估计存在180°电角度差的问题,提出一种直轴正方向判定新方法。利用不同磁极下(N极和S极)的去磁和增磁效应影响导致的定子直轴等效电路时间常数不同的特点,判定实际直轴正方向。

图3 直轴位置最终估计系统控制框图

图4 直轴位置最终估计实施流程图
4 实验验证
在PMSM实验平台上,对本文提出的判定方法进行了实验验证,实验电机参数如表2所示。
表2 实验电机参数


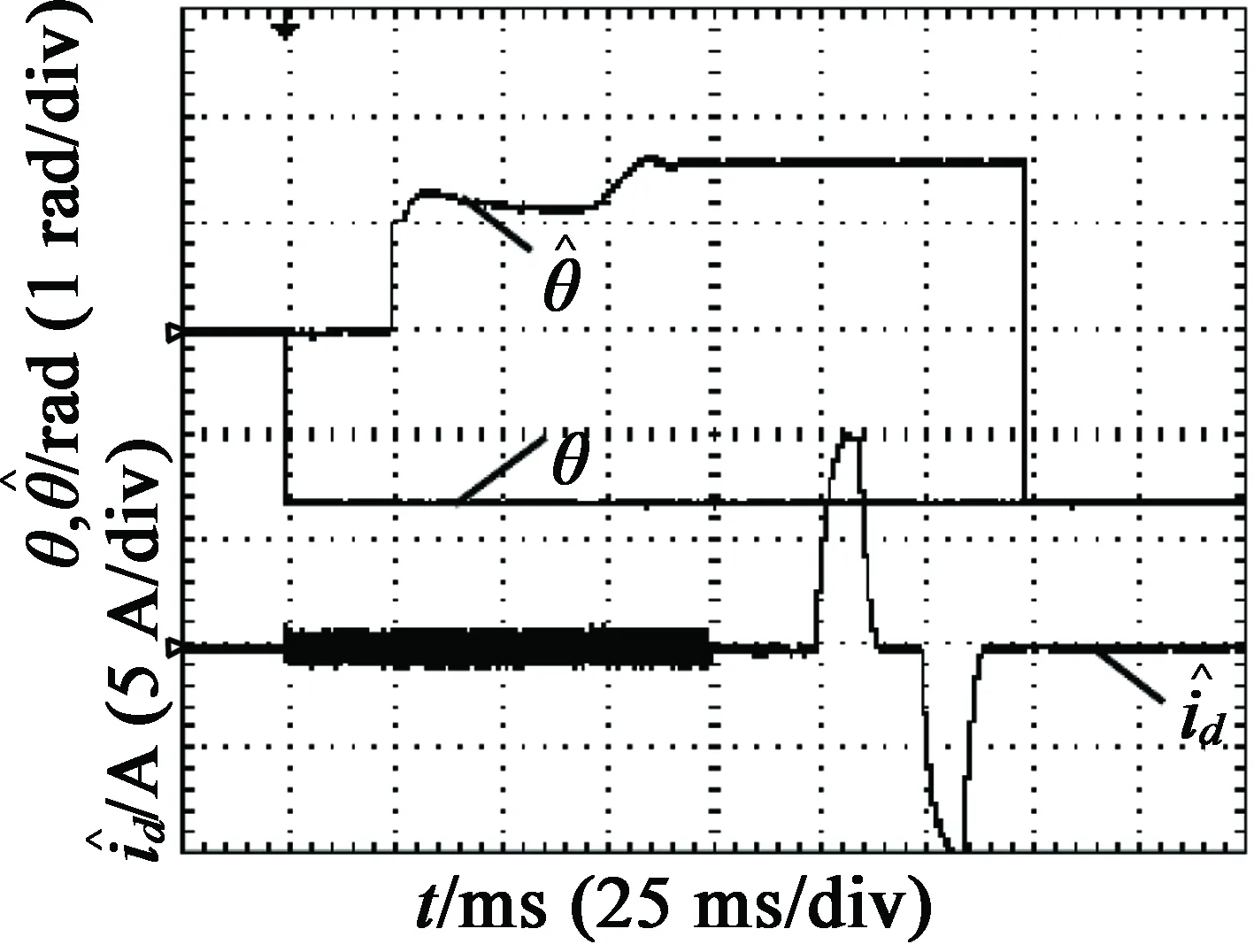
(a) θ=1 rad
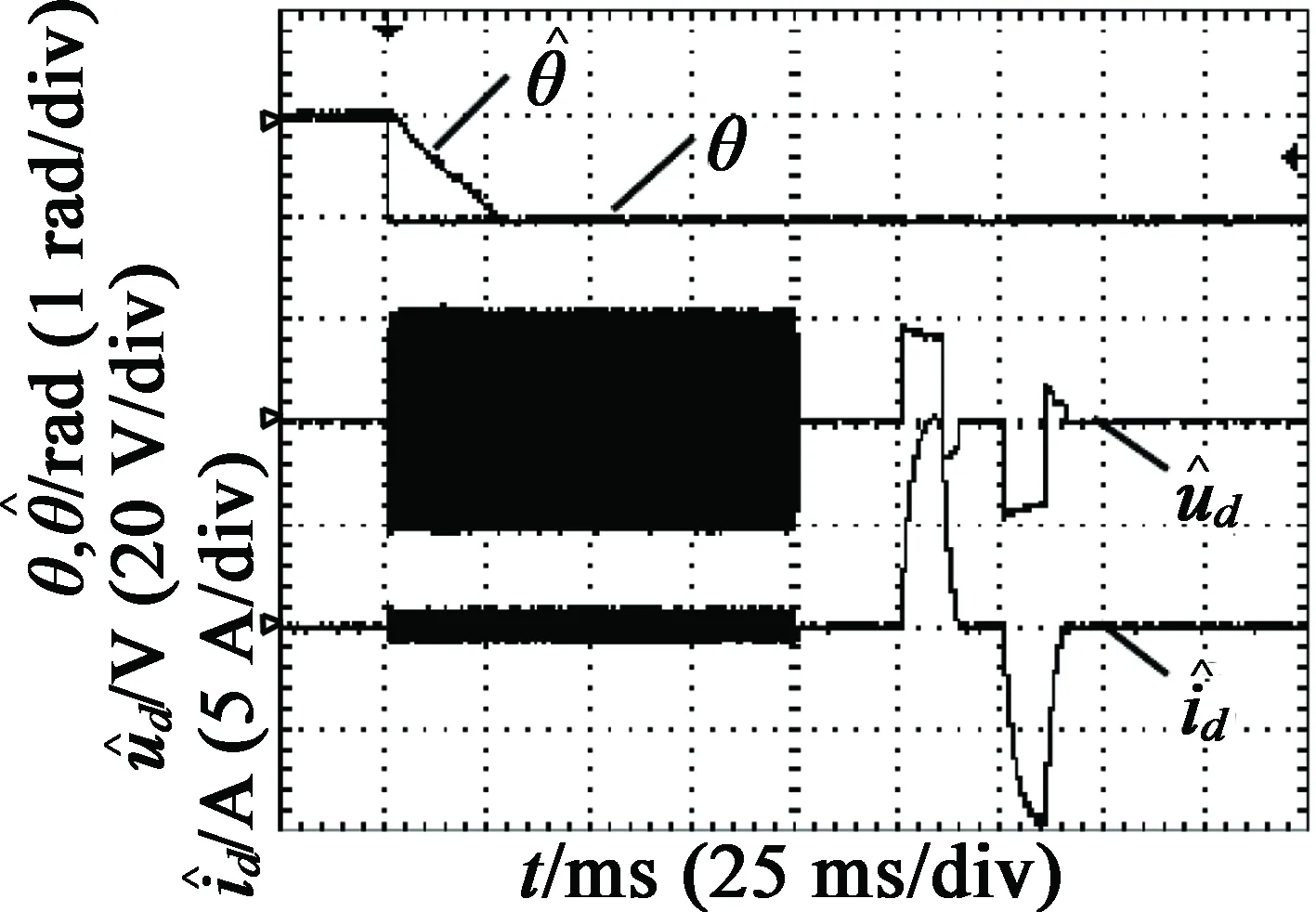
(b) θ=-1 rad

(c) θ=2 rad
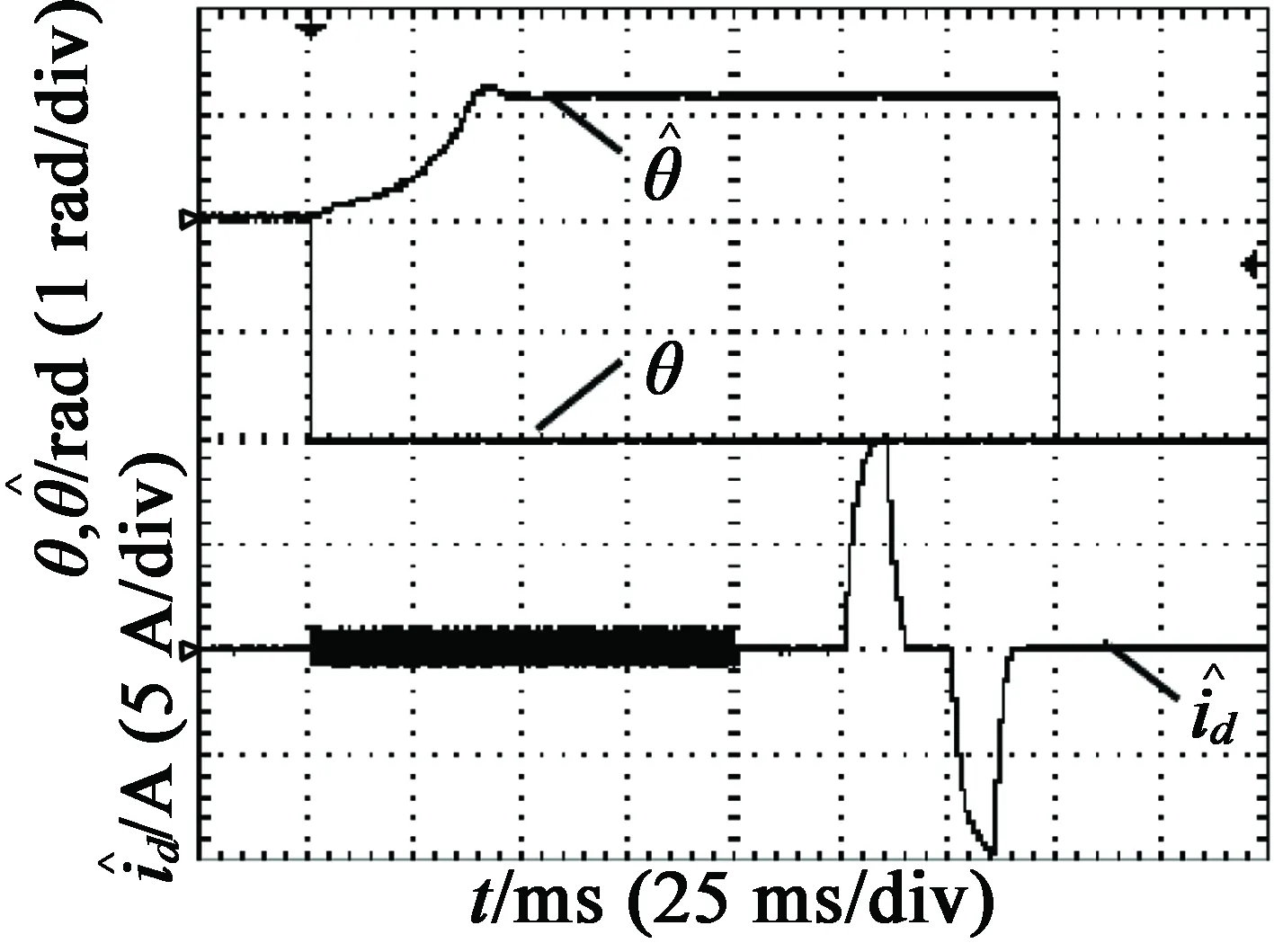
(d) θ=-2 rad


(a) θ=0

(b) θ=π/2

(c) θ=π
(d) θ=-π/2
由图5、图6可知,对于不同区间的4个位置以及4个特殊位置,本文方法均能准确判定出实际直轴正方向,及时对其作出相应的角度补偿。
5 结 语
针对基于脉振高频电压注入的PMSM直轴位置估计存在180°电角度误差的问题,提出一种估计直轴正方向判定与补偿的方法。利用不同磁极下
(N极和S极)去磁和增磁效应影响导致定子直轴等效电路时间常数不同的特点,判定实际直轴正方向。此方法参数整定方便,有利于脉振高频电压注入法转子位置估计系统的优化,提高PMSM转子位置估计的精度。对此方法进行理论研究和相应的实验分析,实验结果验证了本文方法的有效性和实用性,在实际工程中有着广阔的应用前景。
[1] AKIMATSU R,DOKI S.PMSM position sensorless control in the inverter overmodulation range[C]//Power Electronics and Applications (EPE),2013 15th European Conference,2013:1-8.
[2] LUO X,TANG Q,SHEN A,et al.PMSM sensorless control by injecting HF pulsating carrier signal into estimated fixed-frequency rotating reference frame[J].IEEE Transactions on Industrial Electronics,2016,63(4):2294-2303.
[3] XU P L,ZHU Z Q.Novel carrier signal injection method using zero-sequence voltage for sensorless control of PMSM drives[J].IEEE Transactions on Industrial Electronics,2016,63(4):2053-2016.
[4] LEE H,LEE J.Design of iterative sliding mode observer for sensorless PMSM control[J].IEEE Transactions on Control Systems Technology,2013,21(4):1394-1399.
[5] SEILMEIER M,PIEPENBREIER B.Sensorless control of PMSM for the whole speed range using two-degree-of-freedom current control and HF test current injection for low-speed range[J].IEEE Transactions on Power Electronics,2015,30(8):4394-4403.
[6] PARK Y,SUL S K.Sensorless control method for PMSM based on frequency-adaptive disturbance observer[J].IEEE Journal of Emerging and Selected Topics in Power Electronics,2014,2(2):143-151.
[7] 吴春华,陈国呈,孙承波.基于滑模观测器的无传感器永磁同步电机矢量控制系统[J].电工电能新技术,2012,25(2):1-3.
[8] 魏海峰,张懿,杨康,等.电动汽车空调无位置传感器控制的实验研究[J].汽车工程,2016,38(1):116-121.
[9] NAKASHIMA S,INAGAJI Y,MIKI I.Sensorless initial rotor position estimation of surface permanent-magnet synchronous motor[J].IEEE Transaction on Industry Applications,2010,36(6):1598-1603.
[10] 韦鲲,金辛海.表面式永磁同步电机初始转子位置估计技术[J].中国电机工程学报,2012,26(22):104-109.
[11] 万山明,吴芳,黄声华.基于高频电压信号注入的永磁同步电机转子初始位置估计[J].中国电机工程学报,2008,28(33):82-86.
[12] 贾洪平,贺益康.基于高频注入法的永磁同步电动机转子初始位置检测研究[J].中国电机工程学报,2007,27(15):15-20.
[13] 高宏伟,于艳君,柴凤,等.基于载波频率成分法的内置式永磁同步电机无位置传感器控制[J].中国电机工程学报,2010,30(18):91-96.
[14] 于艳君,王本振,朱春波,等.载波频率成分法估算IPMSM转子位置的误差分析[J].电工技术学报,2010,25(12):61-66.
DirectAxisPositiveDirectionDeterminationofPermanentMagnetSynchronousMotorBasedonHighFrequencyInjection
(Suzhou Institute of Industrial Technology, Suzhou 215104, China)
Abstract:Since estimated direct axis positive direction of permanent magnet synchronous motor based on fluctuating high frequency injection method exists 180° electric angle error, a method to determine the positive direction and compensate based on fluctuating high frequency injection was proposed. On the basis of getting the first estimated position, four initial position angles that cause the position estimate to fail were considered, and the initial position estimate given were changed to maintain the system to run normally. The equivalent circuit time constant of the stator direct axis were different with demagnetization and magnetization effects of different magnetic poles (N and S poles), then the positive direction of actual direct axis was determined, and the effective electrical angle compensation was made for the initial position estimation. Experimental results verified the validity of the proposed method to determine the positive direction of estimated direct axis.
Key words:permanent magnet synchronous motor; fluctuating high frequency injection; positive direction of estimated direct axis; position compensation
中图分类号:TM341;TM351
A
1004-7018(2018)05-0062-04
2017-01-16
