
袋装水泥装车机械手结构强度分析
2018-06-04 12:02:29孙佳涛黄金凤吕玉明董珈皓
机械工程与自动化 2018年3期
孙佳涛,黄金凤,吕玉明,董珈皓
(华北理工大学 机械工程学院,河北 唐山 063210)
0 引言
目前世界各国的水泥生产行业中,袋装水泥的产量仍然很大。水泥装载过程中大多采用“胶带传送机-人工码包”的方式,这种传统的装载方法由于劳动强度大、效率低、装运量小,无法有效配合现代包装机械,且工作环境恶劣、扬尘严重,对装载工作人员的身体健康以及空气环境都造成严重影响[1]。因此,迫切需要一套高效的自动袋装水泥装车设备,以降低生产成本、提高装车效率、减小环境污染。
在袋装水泥装车机械手的研究中,为改善其性能,在设计阶段应采用现代先进的设计和分析方法对机械手的整体结构和主要部件进行分析和优化[2]。本文利用三维建模软件SolidWorks建立机械手模型,通过ANSYS Workbench软件对机械手进行静力学分析,检验主要受力部位的结构强度,为结构优化及样机的研制提供依据。
1 装车机械手结构设计
机械手由基座处两伺服电机相互协同配合控制两大臂转动预定角度,进而带动连接在大臂上的两小臂运动,最终使安装在小臂末端的搬运厢到达预定位置,而安装在搬运厢上方的伺服电机控制搬运厢转动预定角度,最终使袋装水泥按照码放要求到达指定位置,从而实现机械臂接取、平移、推送等一系列动作,机械臂总体结构如图1所示。
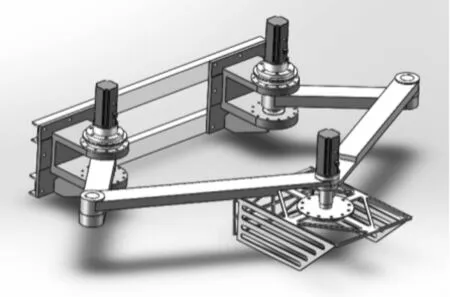
图1 机械臂整体结构图
小臂长度为1 200 mm,大臂长度为650 mm,机械臂安装的两基座中心距为1 000 mm。大臂外壳选用(120×60×4)mm空心结构钢,小臂外壳选用(120×50×4)mm空心结构钢。
2 有限元分析
机器人静力分析不考虑惯性和阻尼的影响,计算在固定不变载荷作用下大臂和小臂的位移、应力,静力分析可以为机器人的结构优化提供非常重要的参考[3]。本文采用ANSYS Workbench软件进行建模仿真,Workbench所提供的CAD双向参数链接互动、项目数据自动更新机制、全面的参数管理、无缝集成的优化升级工具,避免了CAD模型导入经典ANSYS软件出现丢线、丢面或丢体等现象。另外,ANSYS Workbench在模型的处理、网格的划分、后处理功能等方面相比经典ANSYS有较大的优势[4]。
有限元分析过程可分为前处理和后处理两个阶段。在前处理阶段主要完成的工作有:通过SolidWorks与ANSYS Workbench无缝连接接口直接将CAD模型导入Workbench中,在Workbench软件中完成材料属性的加载、接触面的约束、网格的划分[5]。后处理主要完成数据的生成,静力学分析包括应力分析、应变分析以及整体变形分析。
分别将机械手的大臂与小臂模型导入Workbench中,并对模型进行材料属性加载,材料选用结构钢,其密度ρ=7 850 kg/m3,弹性模量E=200 GPa,泊松比μ=0.3。对模型进行网格划分,网格的疏密程度会直接影响到计算结果的精度,经过适当调整网格划分参数,确定了机械手有限元网格划分模型。其中大臂模型共划分2 278个网格、4 379个节点;小臂模型共划分3 633个网格、7 261个节点。大臂和小臂网格划分结果分别如图2、图3所示。
在大臂末端轴孔内壁添加固定约束,为大臂整体添加Standard Earth gravity,并将小臂与搬运厢的重量等效简化为350 N竖直向下的力添加在大臂前端。对模型进行求解,得到大臂等效应力云图、等效应变云图及整体变形云图,如图4~图6所示。
在小臂末端与大臂连接轴孔处添加固定约束,为小臂整体添加Standard Earth gravity,并将搬运厢重量等效简化为100 N竖直向下的力添加在小臂前端。对模型进行求解,得到小臂等效应力云图、等效应变云图及整体变形云图,如图7~图9所示。
3 结论
通过ANSYS有限元分析可知大臂的最大应力出现在大臂末端的轴孔处,最大应力值为9.72 MPa,最大变形量为0.25 mm;小臂的最大应力出现在与大臂连接的轴孔处,最大应力值为9.49 MPa,最大变形量为0.65 mm。大臂与小臂的最大应力值均远小于材料的屈服强度345 MPa,且最大形变微小,不会对机械手工作精度造成影响。机械手整体结构符合设计要求,本文的研究对装车机械手样机的研制与进一步优化具有指导意义。

图2 大臂网格划分 图3 小臂网格划分

图4 大臂等效应力云图 图5 大臂等效应变云图 图6 大臂整体变形图

图7 小臂等效应力云图 图8 小臂等效应变云图 图9 小臂整体变形图
参考文献:
[1] 姚伯刚.国外袋水泥装载技术概况[J].中国建材,1987(7):40-41.
[2] 管贻生,邓休,李怀珠.工业机器人的结构分析与优化[J].华南理工大学学报(自然科学版),2013,41(9):126-131.
[3] 蔡自兴.机器人学[M].北京:清华大学出版社,2009.
[4] Moaveni S.Finite element analysis theory and application with ANSYS[M].Beijing:Publishing House of Electronics Industry,2003.
[5] 姜振廷,郑忠才,董旭.基于ANSYS Workbengh的六自由度机械臂有限元分析及结构优化[J].制造业自动化,2014(1):109-110.
猜你喜欢
包装与食品机械(2021年5期)2021-11-06 11:40:14
环境技术(2021年4期)2021-09-11 08:26:06
冶金设备(2021年2期)2021-07-21 08:44:28
制造技术与机床(2019年12期)2020-01-06 03:17:44
组合机床与自动化加工技术(2019年5期)2019-05-24 03:48:50
哈尔滨工程大学学报(2016年11期)2016-12-12 10:47:41
载人航天(2016年4期)2016-12-01 06:56:21
锻压装备与制造技术(2015年2期)2015-06-26 09:00:30
综合智慧能源(2014年1期)2014-09-10 07:07:40
中国工程机械学报(2014年3期)2014-05-25 08:31:14
