
食品机器人末端执行器研究现状与展望
2018-06-01 01:23:26张秋菊孙沂琳
机械设计与制造工程 2018年5期
张秋菊,张 进,孙沂琳
(1.江南大学机械工程学院,江苏 无锡 214122)(2.江苏省食品先进制造装备与技术重点实验室,江苏 无锡 214122)
我国是世界食品、农产品生产大国。食品工业是国民经济中增长速度最快、最具活力的支柱产业之一。在工业发达国家,工业机器人已经广泛应用于食品工业[1]。作为传统的劳动密集行业,在人口红利逐渐消失、市场竞争日趋激烈的今天,应用机器人技术已成为中国食品工业降低劳动强度、改善劳动条件、提高生产效率、保证食品安全、提高生产自动化水平的必然选择[2]。与其他行业相比,食品行业所面对的操作对象具有极大的特殊性:质地大多具有柔软(如面包、蛋糕)、酥脆(如饼干)、易损(如水蜜桃、鸡蛋)等特点;形状大多不规则,近似为片状(如饼干、蔬果切片)、椭圆形(如芒果)、柱形(如黄瓜、火腿肠)和复杂形状(鱼肉类)等;尺寸大小不一、质量各异。像汽车零件这种固体、坚硬、外观一致的东西很容易用机器人来移动,但是要移动像肉、水果、蔬菜和糕点这种精细、有弹性、天然外观多种多样的物体,就需要更加复杂的传感系统和操作系统。此外,食品行业对机器人的操作要求也极具特点:食品无破损、卫生安全、工作效率高、稳定性好,其中食品卫生安全是首要和必须满足的要求[3]。
机器人末端执行器是安装在机器人机械臂前端直接作用于操作对象的执行部件,其性能直接影响操作任务的执行效果以及工作效率,因此长期以来一直是机器人领域的研究热点之一[4-5]。近年来国内外先后研究开发了多种机器人末端执行器。食品材料为非刚性材料,其质地、形状和尺寸等差异很大,针对不同的食品,食品行业使用的机器人末端执行器基本都是专用的,且绝大部分由非食品末端执行器演化而来。对于各种柔、脆、不规则形状食品的灵巧、柔顺抓取,一直是食品机器人末端执行器的设计难点[6]。
食品材料为非刚性材料,种类繁多,差异很大。食品机器人末端执行器受食品形状、质量、表面特性、干燥度、黏性和硬度等多种因素的影响,成为食品机器人推广应用的瓶颈问题。笔者在定义食品机器人的基础上对食品机器人末端执行器进行分类,分析了食品机器人末端执行器研究中仍存在的问题,旨在指出食品机器人末端执行器的研究方向与发展趋势。
1 食品机器人的定义
食品机械是把食品原料加工成食品(或半成品)过程中所使用的机械设备和装置。作为食品工业发展的重要物质基础和技术支撑,先进的食品机械装备是提高生产效率、降低能源消耗、保持食品营养成分和风味、减少环境污染的重要保障[7]。食品机械的种类十分繁杂,发达国家食品机械的品种多达3 000种以上;我国大约有1 800种。按照食品的种类和行业的不同,食品机械可分为食品加工机械和食品包装机械两大类。食品加工机械包括粮油加工设备、果蔬保鲜与加工设备、畜禽产品加工设备、水产品加工设备、方便食品加工设备、饮料加工设备和食品加工中废弃物综合利用设备等。食品包装机械是指能完成全部或部分产品的食品包装过程的机械[8]。包装过程包括充填、裹包、封口等主要工序,以及与其相关的前后工序,如清洗、堆码和拆卸等。此外,包装还包括计量或在包装件上盖印等工序。典型的食品包装机械有啤酒、饮料灌装机械,封口机械,裹包机械,真空包装机械,袋成型充填包装机械,捆扎包装机械,袋充填封口包装机械等。
在食品加工与包装行业中应用机器人的目的是为了降低劳动强度、改善劳动条件、提高生产效率、保证食品安全。目前食品机器人尚无严格的定义与分类。本文定义的食品机器人专指应用于食品加工与包装过程,直接对食品物料进行操作,改变其形态或空间位置的工业机器人。因此,对于那些应用于食品加工与包装行业,主要从事体积大而笨重的食品包装箱的搬运、装卸和码垛操作的工业机器人,从严格意义上来说不属于食品机器人。常见的食品机器人,包括做分级、分拣、清洗、称重等预处理加工的机器人,以及肉类加工、剪羊毛、鱼类去骨、削面、切菜、烹调、品味机器人等。对于食品机器人,由于操作对象多样化(形态、特质随食品种类而各异),操作要求个性化(例如切割牛肉、去鱼骨),因而动作复杂、实现难度较大。应用于大规模食品工业生产的食品机器人,由于生产线工作速度快、大批量的连续化生产,对食品机器人的速度、生产率、稳定性以及可靠性要求很高。
由于食品与人们的安全息息相关,所以食品机器人还要具有高度安全性。在机器人本体及关键部件的材料、润滑、防护等方面,都有很高的卫生要求。以润滑油为例,普通的机械润滑油是由原油提炼而成的基础油和添加剂组成,对人体有极大的危害,这样在食品加工机械中使用普通的润滑油就为食品安全埋下了隐患[9]。不少食品企业采用食品用油做润滑剂,虽然可以保证安全,但若不加强防护任由润滑油滴落到食品中,会影响食品的口感和外观,同样无法通过食品最终检验。因此,需要采用专门针对食品机械的工作环境(如高/低温、高湿度等)设计配方的食品级润滑油,这些润滑油通常具有非常好的抗氧化、耐高低温和抗乳化性能。另外,机器人在防护上也需要采用全封闭式的结构。
2 食品机器人末端执行器的要求与分类
食品机器人抓取物料时,末端执行器先接近食品,并在食品附近定位;末端执行器与食品接触,在允许的范围内增大抓取力,达到阈值后停止,保证末端执行器能够稳定抓取食品且不损伤食品;末端执行器将食品搬运到指定位置,按照一定的方向释放食品。因此抓取过程包括了定位、抓取、移动、定向和放置等环节。为了保证末端执行器抓取食品的可靠性,各类传感器被用来检测和监控食品抓取的全过程[10]。
食品机器人通过末端执行器对食品物料进行操作,直接与食品接触,因此食品机器人末端执行器必须适合食品处理,其卫生要求是绝对且首要的挑战,在处理未包装的食品时尤为重要。机器人末端执行器可能会受到任何未知污染源的侵袭,在食品中有3种污染必须避免[11]:有毒污染、细菌污染和变色。大部分污染源会经被处理的食品残留在末端执行器上,如果不及时清理,这些残留物将导致细菌或霉菌滋生。尤其是直接抓取肉类食品时,油渍或微粒会很容易在末端执行器的空洞、沟槽和内壁处聚集。此外,由于食品机器人所面对的操作对象具有极大的特殊性,食品材料质地大多具有柔软、酥脆、易损等特点,在可靠抓取食品物料的同时,必须避免损伤食品物料。食品可能出现的损伤类型包括擦伤、撕裂、断裂和变形等[12]。
因此,食品机器人对末端执行器的功能要求有:1)准确、可靠抓取;2)不损伤食品;3)卫生安全,不允许出现任何污染;4)抓取速度尽可能快;5)通用性、适应性尽可能好;6)易于清洁;7)成本尽可能低,结构不宜过于复杂。
针对不同的食品物料,近年来国内外相继设计开发了多种食品机器人末端执行器。根据其用途和结构的不同,可大致分为以下类型:1)吸附类,利用真空负压或伯努利原理吸取物料;2)夹持类,通过刚性或柔性夹爪直接夹持物料;3)其他食品专用类,如针刺式、冻结式等。抓取不同特征的物件需要有着不同类型的结构和驱动源,表1给出了常见的食品机器人末端执行器分类和特点对比[4,12]。

表1 食品机器人末端执行器分类和特点对比
在实际应用中,食品机器人的末端执行器不只局限于单一的结构类型和抓取策略,复合型末端执行器是食品机器人的研究方向之一。食品机器人末端执行器可以结合多种策略和方法,增加抓取时食品与末端执行器的耦合度,从而形成有效的抓取系统。
3 食品机器人末端执行器研究进展
3.1 吸附类末端执行器
吸附类末端执行器最常见的是真空吸盘。食品机器人在抓取食品时真空吸盘与食品表面接触,利用真空在食品两侧产生压力差,从而稳定地抓取食品,且对食品的损伤较小[13]。基于不同弹性材料的真空吸盘已形成标准,其控制方法简单,在食品行业中广泛使用。
吸盘系统的突出优点是可以方便地与抓取机械兼容,形成吸盘复合型末端执行器,从而有效减少损伤。在设计蔬果采摘机器人时,许多研究者使用了配有真空吸盘的爪型末端执行器抓取蔬果。LING等[14]开发的一款番茄采摘机器人末端执行器如图1(a)所示,在夹爪的掌心位置设有1个真空吸盘用于吸附果实;其4根手指均由腱绳驱动,用于稳定抓取和限制侧滑。该复合型末端执行器具备抓取不同形状果实的功能,但4根手指为刚性材料制成,虽然手指与食品接触部分装有弹性材料和压力传感器,但仍避免不了对食品表面的损伤。剑桥咨询公司(Cambridge Consultants)研发的新型末端执行器如图1(b)所示,将刚性爪指换成真空吸盘,通过联合气动控制,以适应各类水果的形状和纹理,并配合视觉系统,区分并选择性地挑选不同品种、形状、大小和颜色的水果,在不破坏水果的情况下实现抓取[15]。
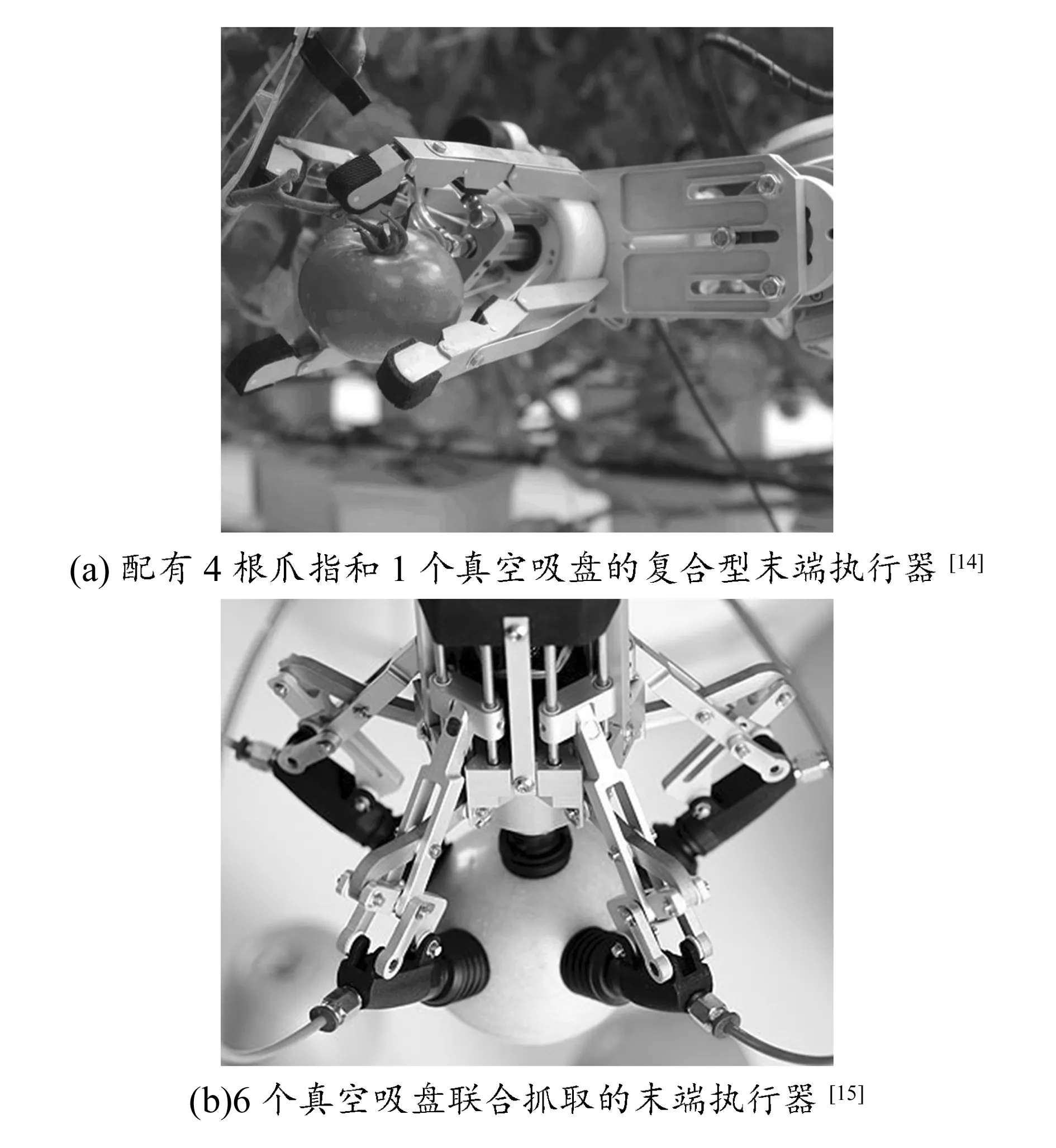
图1 吸盘复合型末端执行器
吸盘式食品机器人末端执行器需要注意清洁卫生问题。真空吸盘工作时,其内表面与食品接触,在抓取食品的同时,也会将食品表面的油、水以及残渣等吸入真空系统,由于吸盘、管壁等难以清理,易导致细菌滋生。针对此不足,基于伯努利原理的新型吸附式末端执行器被研究开发出来,并在食品行业得到应用[16]。
伯努利效应表明流体速度加快时,物体与流体接触的界面上的压力会减小,反之压力会增大。因此,伯努利原理可以应用于物体提升。如图2(a)所示,压缩空气(A)从伯努利吸盘中通过时,由于物体的阻挡,空气在物体的上表面横向流动(B),从而使物体上方的气压降低。伯努利吸盘与物体接近,相同体积的空气从伯努利吸盘中流出,空气的流速加快,物体上下表面压差增大,提升力FL增大。最终,提升力FL克服物体重力和气流冲击力,实现抓取功能[17-20]。

图2 各种伯努利吸盘
伯努利吸盘为非接触式吸盘,其空气系统经过严格的过滤,能够有效地避免普通真空吸盘易污染、难清理的缺陷,但伯努利吸盘对物体的提升力小,更适合切片状食物的抓取[17]。德国机器人自动化供应商Brähmig公司利用AVENTICS公司生产的伯努利吸盘抓取2D脆性饼干,该款吸盘提升力为2.0 N,如图2(b)所示[18]。在三明治加工中,对黄瓜和西红柿切片的抓取与摆放有一定的要求,人工参与生产劳动成本高,卫生不能保障,DAVIS等[19]基于伯努利原理开发出卫生的非接触式吸盘,满足了生产线要求,如图2(c)所示。PETTERSON等[20]对传统的伯努利吸盘的结构进行改进,将伯努利吸盘微元化,微元吸盘阵列排列,以相互平行的两块支撑板上的孔为导向,可独立地沿垂直轴线移动且不受限制。整体吸盘的吸附表面可适应3D蔬果的形状,实现抓取功能,如图2(d)所示。然而,用于3D食品抓取的伯努利吸盘结构复杂,成本高,目前仍未在生产线上得到推广。
3.2 夹持类末端执行器
夹持类末端执行器是机器人末端执行器中非常重要的一类,本文简称为抓手。抓手是一种接触式夹持机构,在实现抓取功能时,在夹持机构的爪指和物体之间会产生夹持力,物体在静摩擦力的作用下被提升。抓手种类很多,可以是满足特定任务的专用夹持器,也可以是多用途的多指抓手。专用夹持器通常针对特定形状、材质的抓取对象,结构简单、控制方便、负载能力强、可靠性高。多指抓手的自适应能力强,但往往结构复杂、控制困难、负载能力差、可靠性低。因此,在食品行业中,针对不同食品材质选择合适的末端执行器至关重要,需要综合考虑抓手张开范围(从张开到闭合的距离)、最大抓取力、运动类型、驱动方式(气动、电机驱动、磁力驱动等)、手爪或手指的形状以及抓取方式(外部抓取或内部抓取)等[21]。
为简便起见,本文仅根据爪指材料将抓手分为采用硬质材料的抓手和基于软体材料的抓手两大类进行阐述。
3.2.1基于硬质材料的抓手
采用硬质材料的抓手结构和爪指数量与被夹持物体的形状、材质、质量有关。通常情况下,爪指的构型与物体的轮廓基本一致,爪指数量越多夹持越牢固,但机构及控制的复杂性增加。因此对形状较为规则,尺寸和质量一般不太大的抓取对象,通常采取较少的爪指抓持。对损伤要求较高的应用场合,抓手的柔顺性尤为重要。即使是采用硬质材料的抓手,为避免或减小食品损伤,也往往通过在爪指上贴覆弹性材料以增强对不同物体表面的适应能力,或者在爪指关节增加柔性以缓解抓取时的硬性接触[22]。
图3(a)为Lacquey公司[23]开发的一种抓取卷芯菜的刚性抓手,由电机驱动,可以方便地引入力、加速度和位置等传感器,构成闭环控制。这类抓手适合大而重的食品,但刚性接触容易引起敏感性食品损伤。近年来新的仿生机理、新材料、新结构的研究与应用,有力推动了机器人抓手向高柔性、高适应性、高灵敏和高可靠性方向发展。为了提高机器人抓手的柔顺性,国内外研究者开始尝试不用电机而选择气压、人工肌肉和新型功能材料等作为机械抓手的驱动方式。图3(b)所示为德国Festo公司采用选择性激光烧结工艺制造的仿生机械抓手[24],该抓手由轻质塑料制成,通过气动方式驱动,轻柔灵活有如人类的手指,可针对不同物体形状自动调节,快速安全地处理水果、球茎和其他易碎食品。
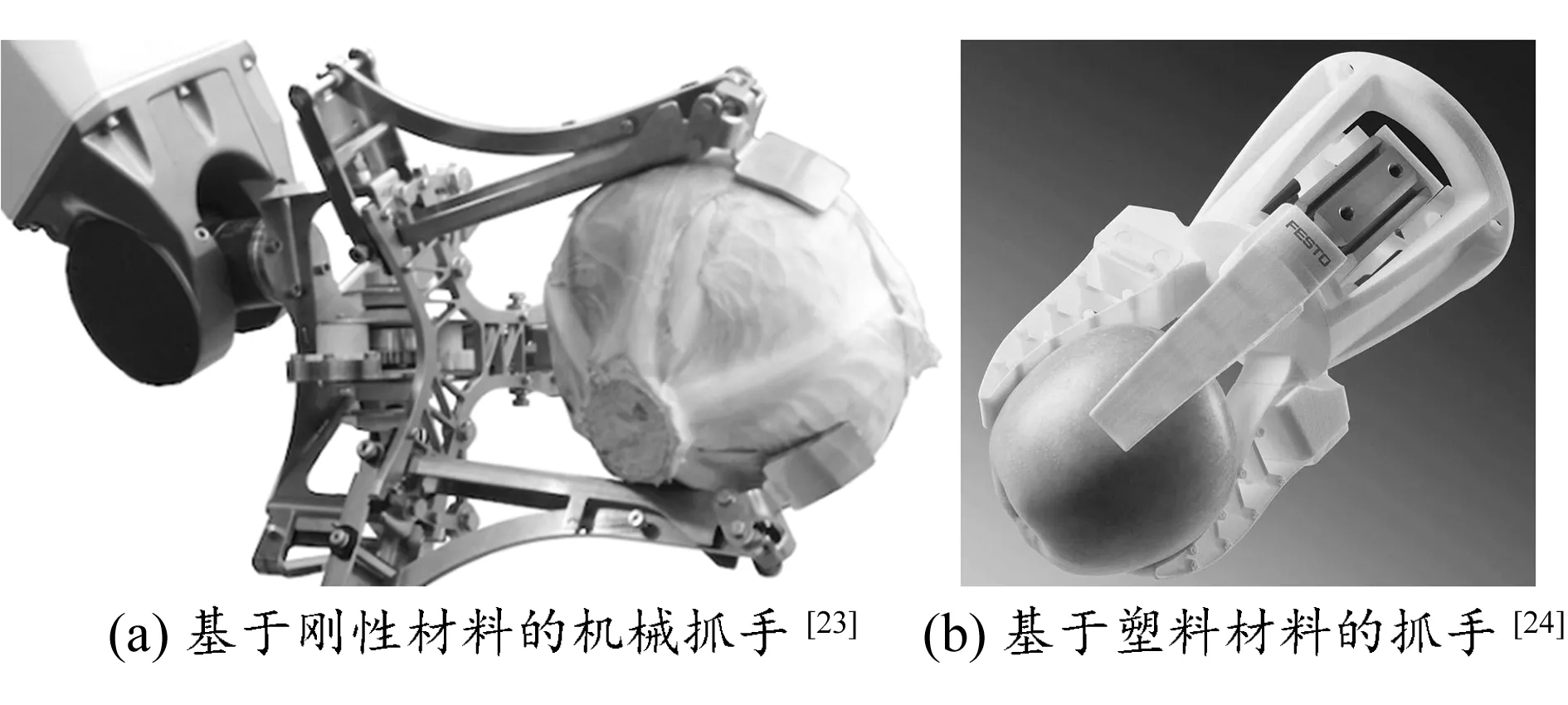
图3 硬质材料抓手
3.2.2基于软体材料的抓手
受自然界象鼻、章鱼触角等生物器官运动形式的启发,一些研究者另辟蹊径,提出了“软体机器人”的概念[25-29]。机器人技术中常用材料(金属或硬质塑料)的杨氏模量范围为1×109~1×1012Pa。图4给出了常见材料的杨氏模量范围[25]。软体机器人主要由杨氏模量与软体生物材料(肌肉、皮肤、软骨等)相当的材料构成,或者使用杨氏模量小于1GPa的软体材料。于是基于软体材料的接触式软体抓手应运而生[26],常用的软体材料为硅橡胶,其杨氏模量小于1.0MPa。
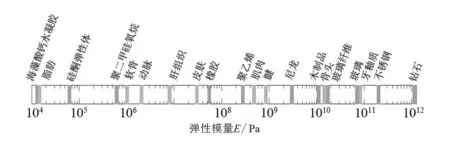
图4 工程和生物领域常用材料杨氏模量的近似值[25]
如图5(a)所示,软体抓手在弹性体内设置气动通道,并以有限变形层作为手指的一个侧面。外界气源驱动时,通道内部压力增加,手指会像气球一样膨胀,气动通道薄壁处迅速膨胀,并沿有限变形层侧向内弯曲。外界气源关闭后,通道内压力减小,手指恢复到原始位置[27]。对软体手指进行气动驱动,手指腔内的气压越高,手指弯曲越明显[28],如图5(b)所示。

图5 软体材料驱动原理
根据软体材料的控制机理,美国哈佛大学ILIEVSKI等[29]研制出软体机器人抓手。如图6所示,该抓手完全由软体材料制成,每根手指均由软硬软三层材料组成,软体材料内有气动通道网络用以驱动,气动塑料软管伸入抓手中心部位,为抓手提供驱动所需的压缩气体;一根线悬于抓手的上方,帮助提升物体。
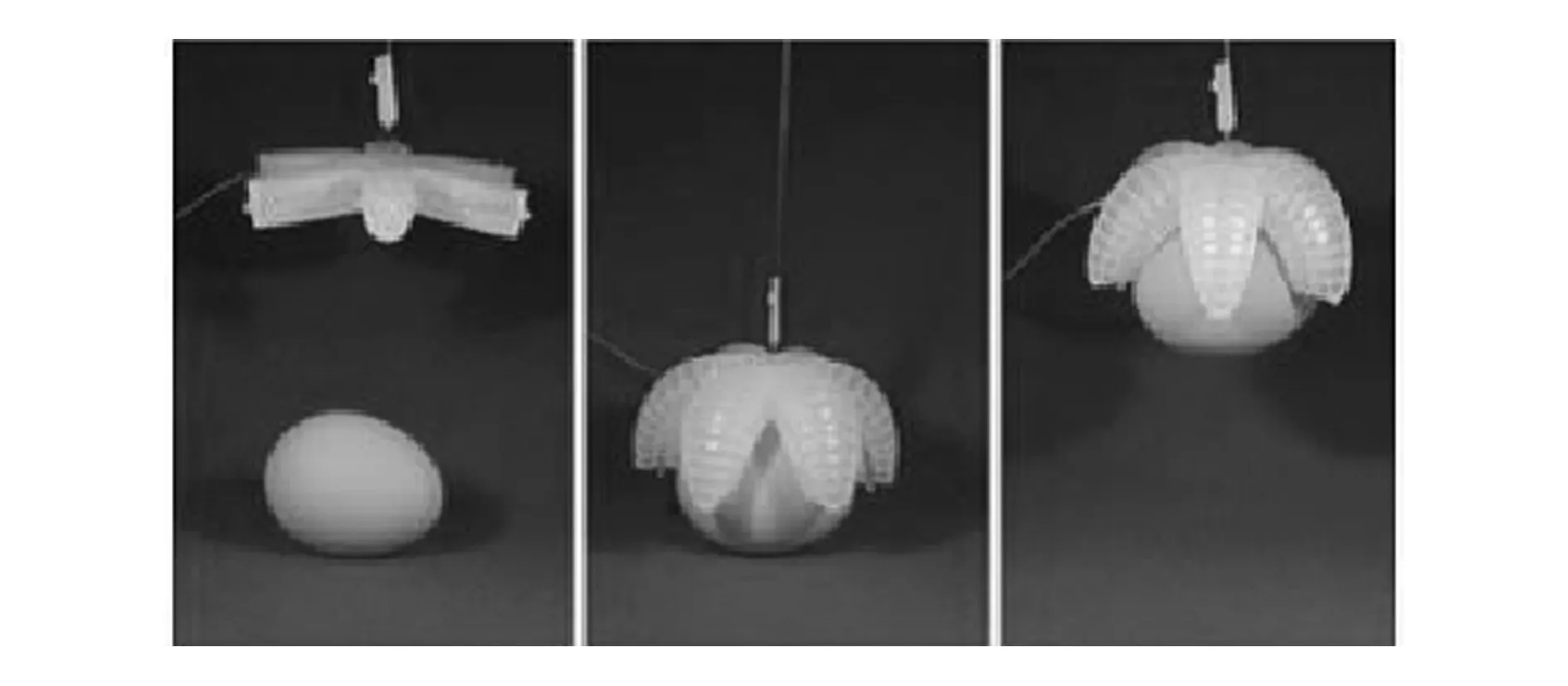
图6 软体抓手抓取鸡蛋[29]
为了实现软体抓手与机器人的集成,研究者提出如图7(a)所示的刚-软耦合抓手[30]。手指采用软体材料浇注而成,内部设计有如图5(a)所示的气动通道,整体呈现出足够的柔性,其中手指与被抓物体接触的部分植入弱弹性材料。软体手指与刚性元件耦合,刚性元件可安装在机器人末端。塑料软管与手指连接,通过外接气源驱动手指弯曲。多指软体抓手可实现各个软体手指的独立控制。
由于对压力的低阻抗,软体抓手可通过柔顺变形的方式与接触物体相容,从而大幅度降低接触力,使其在抓取松软、脆性和形状复杂的食品方面具有很好的应用潜力。目前,软体抓手已实现商用化。图7(b)为德国Fraunhofer IVV研究所[30-31]研发的软体抓手,采用单气动通道。为提高抓取力的稳定性,北京软体机器人科技有限公司[32]研发的软体抓手采用双气动通道结构。为增大抓取物体时与物体之间的摩擦力,手指与食品接触部分设置有多个波浪形凸起[33](如图7(c)所示)。此外,英国的Soft Robotics公司[34]和瑞士自动化科技集团ABB[35]等也开发出类似的多指软体抓手。上述软体抓手均采用完全封闭的设计,抓手抓取食品的部分与内部工作部分安全分离;抓手清理简单,手指表面没有空洞和缝隙存在,避免了残余聚集,且无需卸载手指进行清理和防污处理。

图7 刚-软耦合抓手
目前国内有多所高校开展了软体抓手的研究工作:北京航空航天大学的王田苗团队研制了一种气动软体驱动器并制作了一种有很强适应性的软体抓手[36];南京理工大学的李小宁团队研制了一款三触手柔性手爪[37];浙江工业大学的杨庆华团队设计了多款气动机器人多指灵巧手[38-39]。基于软体抓手的优点,研究者正尝试除气动驱动外的其他驱动方式。图8所示为一种欠驱动自适应软体抓手[40]。如图8(a)所示,利用欠驱动机制,在软体手指中植入线缆,利用线缆回路系统,在减少控制参数的形式下驱动、控制软体手指弯曲。在图8(b)中,将欠驱动软体抓手安装于机器人末端,采用一个同步驱动源驱动手指关节。抓手的抓取速度和抓持能力稳定,可抓取不同形状、尺寸和材料的目标物体。
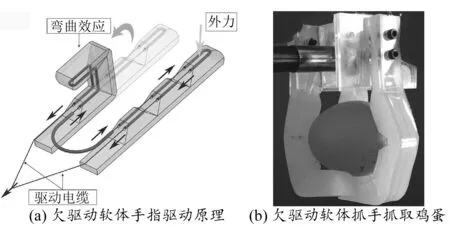
图8 基于欠驱动机制的机器人软体抓手[40]
此外,有研究者采用形状记忆合金(SMA)驱动软体抓手[41]。对SMA施加电流,SMA会产生弯曲;撤销电流,SMA恢复成原来的形状。还有研究者将SMA线制成SMA弹簧,并植入硅橡胶中,制成软体手指,手指与刚性手掌耦合形成多指抓手[42]。所设计的软体抓手能实现多种类型物体的抓取,并且随着SMA上施加电流的增大,软体抓手上的抓取力也不断增大,从而能够有效地控制抓取力。
介电高弹性体(DE)(如聚丙烯酸类材料)是一种典型的电致变形智能软体材料(电子型)。如图9(a)所示,在介电高弹性体薄膜的两侧覆盖柔性电极,并施加驱动电压时,介电高弹性体薄膜在电场力的作用下产生变形,导致厚度减小,面积扩张[43]。介电高弹性体具有弹性模量低、质轻、能量密度大、响应速度快等优点[44]。SHINTAKE等[45]采用介电高弹性体制备出智能软体抓手,通过简单的输入控制,实现了鸡蛋、草莓等食品的抓取,如图9(b)所示。这种结构简单、质量小(约1.5g)、动作迅速(手指闭合时间约100ms)以及灵活性高的智能软体抓手在食品行业有着广泛的应用前景。
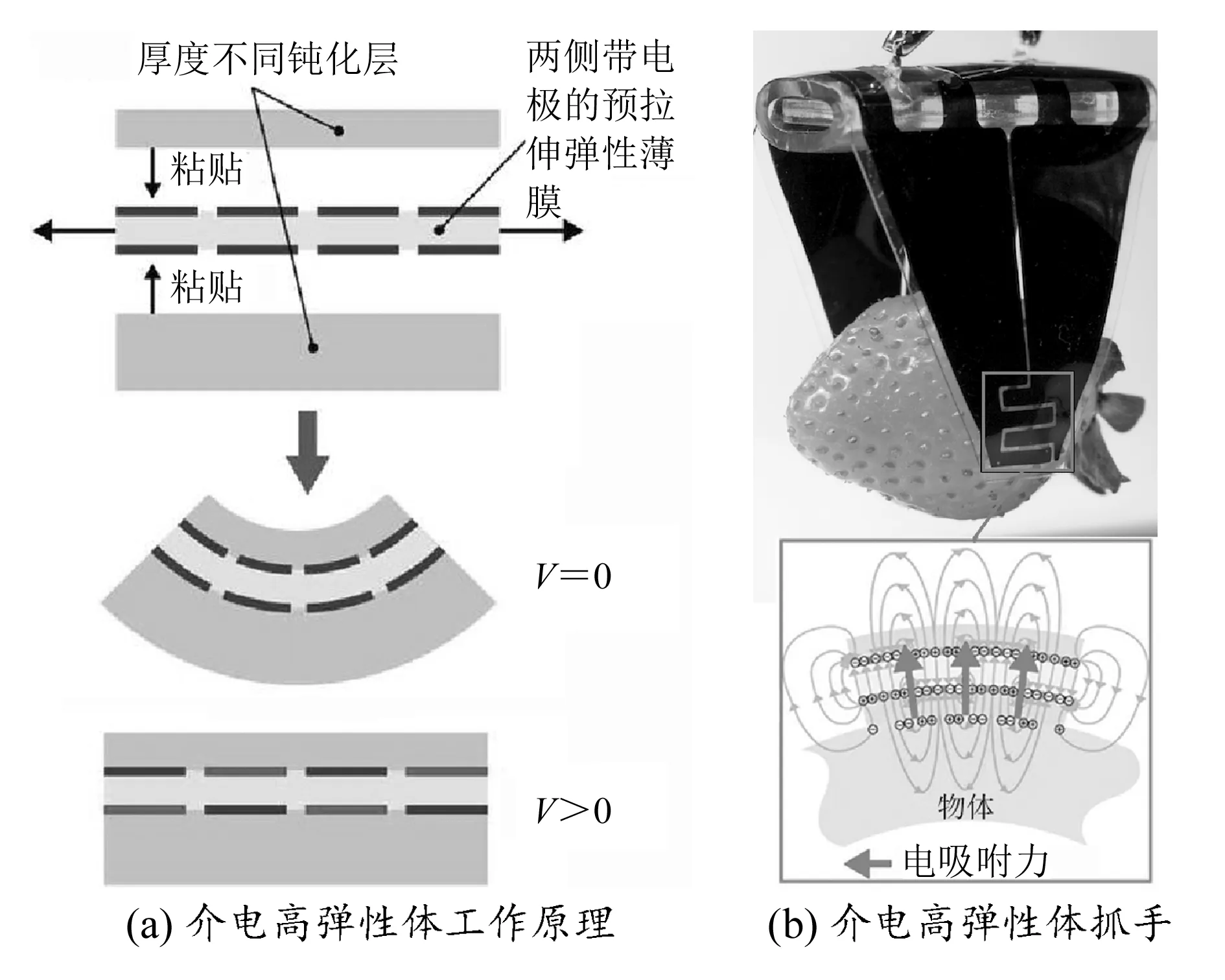
图9 基于智能软体材料的抓手[45]
3.3 其他类型的食品机器人末端执行器
食品生产线中,鱼、肉类食品的处理是必要的。鱼、肉类产品属于柔软、有弹性且尺寸不固定的产品,容易产生油渍,且对损伤要求不高。最简易的方法如图10(a)所示,采用不锈钢夹爪直接夹持此类食品[46]。
针刺式末端执行器适用于许多处理食品的场合,尤其是柔软的食品。如图10(b)所示,这类末端执行器依靠一系列针刺进食品表面或内部,抓取牢靠;针和食品机械互锁,精确定位,在有限的空间里可以轻易地抓取和传送[46]。但是,针刺入食品会在物体表面留有孔洞,这些细孔会降低食品的外观质量,在绝大多数场合是无法接受的。此外,从针上引入的细菌和其他污染,难以清理。
冻结式末端执行器以制冷元件(Peltier元件)为核心,在末端执行器的表面产生低温。制冷元件为半导体器件,当电流通过时产生热流;改变电流的方向,热流方向随之改变,制冷元件由加热状态改为降温状态。基于这种特性的冻结式末端执行器非常有效。电流以一个方向通过制冷元件,实现冻结抓取;逆向的电流可以使抓取的冰融化[47]。图10(c)为冻结式末端执行器的示意图。冻结式末端执行器需要一个内部流体腔充当制冷元件的温度参考,流体以冷水为最佳。末端执行器工作时,冷水需要连续、循环通过其内部,带走制冷元件一侧的热量。冻结式末端执行器适用于冷冻食品的抓取,清洁可靠,没有机械接触部分。

图10 其他专用末端执行器
4 食品机器人末端执行器存在的问题与挑战
目前,市场上已有多种类型的机器人末端执行器在食品自动化生产中得到成功应用。然而受食品形状、质量、表面特性、干燥度、黏性和硬度等多种因素的影响,机器人末端执行器在食品自动化生产中仍面临挑战,主要体现在:
1)柔顺性。
对于各种柔、脆、不规则形状食品的灵巧、柔顺抓取,一直是食品机器人末端执行器的设计难点。为减少食品损伤,一方面要求末端执行器的结构和材质有良好的适应性,另一方面要求食品的抓取过程有很好的柔顺性。
2)清洁卫生性。
虽然食品机器人末端执行器绝大部分由非食品末端执行器演化而来,但并不是所有的都适合食品这一类敏感性产品。一方面要求末端执行器材料本身要符合食品安全要求,另一方面在结构上还要便于保洁清洗,防止二次污染。
3)抓取速度与可靠性。
末端执行器的抓取速度与其结构特性、抓取策略、驱动方式、控制系统以及食品特性等因素有关。对于大批量生产的食品行业,生产效率是一个十分重要的性能指标。末端执行器的工作效率和可靠性是制约食品机器人未来发展和推广应用的一个重要因素。
4)通用性。
由于食品的形状、材质、质量、特性等千差万别,食品行业使用的机器人末端执行器基本都是专用的,造成设备的通用性差,提高了使用成本。食品机器人末端执行器的通用性与系统成本、使用成本之间的矛盾是影响其实用性的难题之一。
对于现有的多种类型的食品机器人末端执行器而言,基于硬质材料的机械抓手往往柔顺性不足,缺乏力觉、滑觉等信息的感知能力,受抓取力的限制,夹持抓取会使食品损伤,但其在抓取质量较重的食品时有一定的优势;真空吸盘式末端执行器易将液体或杂物吸入系统,存在潜在的污染;其他一些末端执行器专用性比较强,如伯努利吸盘适合轻而薄的片状食品,冻结式末端执行器适合冷冻食品。
软体抓手在食品处理中具有很高的灵活性和柔顺性,可以适应物体的轮廓,并且由于抓取力均匀分布而避免食品损伤,但在抓取质量较大或薄片状食品时受到限制,抓取速度慢也使之无法适应现代化的大批量、高效率的食品生产要求。目前,各种形式和驱动方式的软体抓手绝大部分尚处于实验室研究阶段。
5 结束语
食品机器人在食品自动化、智能化生产过程中举足轻重,是有效提高生产率、排除人为风险和污染等因素的重要保障。目前,食品机器人末端执行器在柔顺性与防损伤、抓取效率与可靠性、通用性与实用性等方面仍存在欠缺与不足,成为食品机器人推广应用的制约与障碍。随着科技的发展和智能化程度的不断提高,对食品机器人末端执行器的要求也越来越高,必须从创新结构和材料设计,优化驱动控制,提高柔顺性、抓取效率、可靠性、通用性和智能性等方面开展进一步研究。
软体抓手将成为食品机器人末端执行器的主流,在抓持松软、脆性和形状复杂的食品时具有不可替代的优势,且易于清理,满足卫生要求,并可利用注模技术实现低成本制造。对其更多的研究将从驱动方式、控制抓取力和卫生方面入手,以扩大这类抓手的应用范围。对于蔬果切片类食品或模内食品的抓取,非接触式的伯努利吸盘仍然占据一定的优势,只是需要重点解决这类吸盘带来的脱水问题,另外降低压缩空气对食品的冲击破坏也是研究的重点;大而重的食品抓取还需要刚性材料的支持,同时通过软体材料的辅助避免食品的表面损伤。其他类型的末端执行器将在特定的食品行业发挥其优势。
可以预期,未来食品机器人末端执行器的柔顺性会越来越好,能够自适应各种食品的轮廓,实现食品的无损、稳定抓取;末端执行器的智能化程度会越来越高,通过装载多种传感器,实现多传感信息融合和抓取过程智能控制,能够根据食品的大小、形状和质地,灵敏快速地调节位姿与抓持力,实现高效、可靠的抓取;末端执行器的通用性和灵活性会越来越强,无需更换或只需很少的调整就可以抓取不同类型的食品;末端执行器的系统愈加简单,制作成本低,可控性好,易于操作、清理和维护,可以实现敏感性食品的无损抓取。
参考文献:
[1] GRAY J,DAVIS S T,CALDWELL D G. Robotics in the food industry: an introduction[J]. Robotics & Automation in the Food Industry,2013,10(3): 21-35.
[2] 肖艳. 机器人在包装自动化领域发展势头强劲[J]. 中国包装工业,2014(13): 16-22.
[3] GRUNERT K G. Food quality and safety: consumer perception and demand[J]. European Review of Agricultural Economics,2005,32(3): 369-391.
[4] FANTONI G,SANTOCHI M,DINI G,et al. Grasping devices and methods in automated production processes[J]. CIRP Annals-Manufacturing Technology,2014,63(2): 679-701.
[5] TAI K,EL-SAYED A R,SHAHRIARI M,et al. State of the art robotic grippers and applications[J]. Robotics,2016,5(2):1-20.
[6] FRIEDRICH W,LIM P,NICHOLL H. Sensory gripping system for variable products[J]. IEEE International Conference on Robotics & Automation,2000,2(2): 1982-1987.
[7] 施建平. 食品装备业也面临转型升级和结构调整——访中国食品和包装机械工业协会理事长楚玉峰[N]. 中国食品报,2016-12-05(7).
[8] 岳艺.食品包装机械的自动化控制[J].轻工科技,2016(1):77-78.
[9] 王悦芳,苏铁熊. 我国食品机械发展与食品安全问题关联性探讨[J]. 食品研究与开发,2017,38(1): 215-218.
[10] SAM R,NEFTI S. Design and feasibility tests of flexible gripper for handling variable shape of food products[C]//Proc 9th WSEAS International Conference on Signal Processing,Robotics and Automation,October 10-13,2010,Istanbul, Turkey. Cambridge: WSEAS,2010: 329-335.
[12] BLANES C,MELLADO M,ORTIZ C,et al. Technologies for robot grippers in pick and place operations for fresh fruits and vegetables[J]. Spanish Journal of Agricultural Research,2011,9(4): 1130-1141.
[13] 范孝良,刘一操. 基于真空吸盘的饮水桶自动套袋设备结构设计[J]. 包装工程,2014,35(19): 77-81.
[14] LING P P,EHSANI R,TING K C,et al. Sensing and end-effector for a robotic tomato harvester[C]// ASAE/CSAE Annual International Conference. New York: ASAE,2004: 1-12.
[15] MARSHALL K. Cambridge consultants develops breakthrough robot[EB/OL].(2015-10-28) [2017-06-20]. http://precision.agwired.com/2015/10/28/cambridge-consultants-develops-breakthrough-robot.
[16] SAM R,BUNIYAMIN N. A Bernoulli principle based flexible handling device for automation of food manufacturing processes[C]//2012 International Conference on Control, Automation and Information Sciences (ICCAIS),December 26-29,2012,Ho Chi Minh City, Vietnam. Piscataway: IEEE,2012: 214-219.
[17] LI X,LI N,TAO G L,et al. Experimental comparison of Bernoulli gripper and vortex gripper[J]. International Journal of Precision Engineering and Manufacturing,2015,16(10): 2081-2090.
[18] HEIDE A V D. Careful grippers[J]. Baking+Biscuit International,2011(5): 34-37.
[19] DAVIS S,GRAY J O,CALDWELL D G. An end effector based on the Bernoulli principle for handling sliced fruit and vegetables[J]. Robotics & Computer Integrated Manufacturing,2008,24(2): 249-257.
[20] PETTERSON A,OHISSON T,CALDWELL D G,et al. A Bernoulli principle gripper for handling of planar and 3D (food) products[J]. Industrial Robot,2010,37(6): 518-526.
[21] 李建伟,陈艳艳. 苹果采摘机器人末端执行器的原理及试验研究[J]. 农机化研究,2017,39(9):139-142.
[22] 姬伟,罗大伟,李俊乐,等. 果蔬采摘机器人末端执行器的柔顺抓取力控制[J]. 农业工程学报,2014,30(9):19-26.
[23] LACQUEY B V. Grippers & handling in food industry[EB/OL].(2011-04-13)[2017-06-23]. http://www2.fhi.nl/labautomation/archief/2011/images/richard_van_der_linde-lacquey.pdf.
[24] GRZESIAK A,BECKER R,VERL A. The bionic handling assistant: a success story of additive manufacturing[J]. Assembly Automation,2011,31(4): 329-333.
[25] RUS D,TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature,2015,521: 467-475.
[26] SHEPHERD R. F,STOKES A A,RUI M D N,et al. Soft machines that are resistant to puncture and that self-seal[J]. Advanced Materials,2013,25(46): 6709-6713.
[27] MARCHESE A D,KATZSCHMANN R K,RUS D. A recipe for soft fluidic elastomer robots[J]. Soft Robot,2015,2(1): 7-25.
[28] UDUPA G,SREEDHARAN P,DINESH P S,et al. Asymmetric bellow flexible pneumatic actuator for miniature robotic soft gripper[J]. Journal of Robotics,2014,2014: 1-11.
[29] ILIEVSKI F,MAZZEO A D,SHEPHERD R F,et al. Soft robotics for chemists[J]. Angewandte Chemie,2011,50(8): 1930-1935.
[30] WEYRAUCH T. Development of novel elastomer grippers for a flexible and hygienic handling of unpackaged food[R/OL]. (2013-10-10)[2017-06-22]. https://www.ifoodconference.com.
[31] WEYRAUCH T. Hygienic elastomer gripper for handling sensitive products by robot[EB/OL].(2013-04-22)[2017-06-25]. https://www.ivv.fraunhofer.de/content/dam/ivv/en/documents/services/2013_04_22%20-%20HDG_en.pdf.
[32] 高少龙. SRT柔性夹爪[EB/OL].(2017-03-10)[2017-06-26]. http://www.softrobottech.com.
[33] 鲍磊,高少龙,杨佳. 一种软体四指机器人:201620690257.9[P].2016-11-23.
[34] VAUSE C. The soft robotics system[EB/OL]. [2017-07-19]. http://www.softroboticsinc.com.
[35] SCHIETTECATTE P.Materialise为ABB的双臂机器人Yumi 3D打印灵巧抓手[EB/OL]. (2015-11-18)[2017-07-20]. http://www.dayinhu.com/news/59754.html.
[36] HAO Y F,WANG T M,WEN L,et al. Universal soft pneumatic robotic gripper with variable effective length[C]// Proceedings of the 35th Chinese Control Conference,July 27-29,2016,Chengdu. Piscataway: IEEE,2016: 6109-6114.
[37] 徐淼鑫,李小宁,郭钟华. 新型柔性夹持装置软体手指的数学模型研究[J]. 信息技术,2016,4(5): 99-102.
[38] 王志恒,钱少明,杨庆华,等. 气动机器人多指灵巧手——ZJUT Hand[J]. 机器人,2012,34(2): 223-230.
[39] 钱少明,都明宇,杨庆华.3自由度气动柔性手指包络抓持力模型研究[J]. 农业机械学报,2014,45(2): 66-72.
[40] MANTI M,HASSAN T,PASSETTI G,et al. An under-actuated and adaptable soft robotic gripper[C]// 4th International Conference,Living Machines,July 28-31, 2015,Barcelona, Spain. London:LNCS,2015: 64-74.
[41] ZHONG Z W,YEONG C K. Development of a gripper using SMA wire[J]. Sensors & Actuators A Physical,2006,126(2): 375-381.
[42] OBAJI M O,ZHANG S. Investigation into the force distribution mechanism of a soft robot gripper modeled for picking complex objects using embedded shape memory alloy actuators[C]//2013 6th IEEE Conference on Robotics, Automation and Mechatronics (RAM),December 12-15,2013,Manila,Philippines. Piscataway: IEEE,2013: 84-90.
[43] KOFOD G,WIRGES W,PAAJANEN M,et al. Energy minimization for self-organized structure formation and actuation[J]. Applied Physics Letters,2007,90(8): 081916.
[44] 李铁风,李国瑞,梁艺鸣,等. 软体机器人结构机理与驱动材料研究综述[J]. 力学学报,2016,48(4): 756-766.
[45] SHINTAKE J,ROSSET S,SCHUBERT B,et al. Versatile soft grippers with intrinsic electroadhesion based on multifunctional polymer actuators[J]. Advanced Materials,2016,28(2):231-238.
[46] BULJO J O,GJERSTAD T B,CALDWELL D G. Robotics and automation in seafood processing[J]. Robotics & Automation in the Food Industry,2013,5 (3/4): 354-384.
[47] LIEN T K,GJERSTAD T B. A new reversible thermal flow gripper for non-rigid products[J]. Transactions of the North American Manufacturing Research Institution of SME,2008,36:565-572.
猜你喜欢
军事文摘(2024年4期)2024-01-09 09:07:58
实用手外科杂志(2022年2期)2022-08-31 09:48:18
上海交通大学学报(2021年2期)2021-03-02 10:17:22
小聪仔(婴儿版)(2020年12期)2021-01-26 00:54:42
军事文摘(2020年24期)2020-11-29 06:35:54
测控技术(2018年12期)2018-11-25 09:37:50
制造技术与机床(2017年9期)2017-11-27 02:13:45
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
少年科学(2015年8期)2015-08-13 22:13:01
