
基于阿克曼转向角在四驱电动汽车中的运用分析
2018-05-31 02:53申川川
时代汽车 2018年4期
申川川
河南省安阳市 455000
1 引言
随着新能源电动汽车的发展,国内外对电子差速器的研究也逐渐增多。采用电子差速器,利用软件对各驱动轮的转速和转矩进行合理分配,可以减少了机械传动部件,使电动汽车具有传动效率高、空间布置灵活、易于实现底盘系统空间布局优点。阿克曼转向原理要求车轮轴线在汽车转向时相交于转向中心,不考虑其他干扰因素,车轮在转向时以纯滚动、无侧偏的方式转动,防止车轮磨损过快。阿克曼转向理论是一种理想的转向状态,不过很多电动汽车转向机构无法完全满足阿克曼转向角,都存在一定程度的误差。这其中的原因主要与转向机构的预设参数有关。
2 阿克曼转向原理概述
电动汽车阿克曼转向原理是指在车辆忽略侧向力、轮胎偏磨等因素的理想状态下,电动汽车的所有车轮的旋转中心线能最终交于一点。
由阿克曼原理得到的前轮内轮转角和外轮转角的关系可表示为图1简易几何模型:
四驱电动汽车根据传统汽车阿克曼转向理论进行设计时,在低速时能保证汽车顺利转弯而不发生磨胎现象,不仅提高汽车轮胎使用寿命,还增加了驾驶电动汽车的安全性。
根据上述阿克曼理论的可行性,为了便于实验开展分析,在低速情况下,对前轮进行阿克曼转向几何学进行分析,故在以下差速转向设计分析中不考虑路况、轮胎偏模、车辆质心等干扰参数。
图1中 为前轮的左右转向角,K为转向轮中心距,L为电动汽车的轴距。由此根据几何计算得出车轮转向角公式(1)如下:
式1
假设在理想运行状态下,得出车轮行驶速度关系公式(2):
式2
在公式(2)中V为电动汽车的重心速度,R为电动汽车重心到转向中心的距离;V1、V2分别表示前轮左右轮的车速;R1、R2分别表示为前轮左右轮中心到交汇点的距离。
假定V0表示汽车的初始速度,根据汽车转向时几何关系图,可以计算前轮左右轮的转速V1、V2得出公式3、公式4:
式3

当转动方向盘时,系统判定方向盘转动量计算出前后轮的转动角度,最后根据转向角信息信号和汽车的初始速度分别计算出前轮左右轮速度V1、V2,最后驱动电机以V1和V2为转速目标设定值,对转向轮进行干涉。

图1 阿克曼简易几何模型
3 四驱电动汽车阿克曼转向优化思路分析
由于分布式驱动电动汽车的驱动轮转矩和转速均可独立控制,使得分布式驱动电动汽车的驱动系统效率更优,更加利于整车布置,动力学响应的速度更快。
根据阿克曼转向原理得知汽车的转向角约为30度,可以把前后轮中左右两个轮的转向节设计连接装置,通过螺杆式拉杆连接起来,利用伺服电机来控制转向角的变化,当车身控制模块PIM收到转向信号时,控制伺服电机运转,通过螺杆式连杆控制左右轮的转向,当车身控制模块PIM接收到大变量转向信号,同时控制前后伺服电机运转,实现前后轮同时转向,并时刻采集转向节角度位置传感器的信号来控制转向角度的变化和修正。车身模块控制程序根据转向节角度传感器的信号反馈,来控制电机做差速运转来配合转向过程。由于后轮介入转向过程,所以车辆的转弯半径非常小,并且转向角度精确。行驶中根据转向角度位置传感器的信号来加强修正,保证车辆的直线行驶状态。
4 实车验证分析
本文采用蔚来ES8作为试验车型,该车型驱动模式为双电机全时四驱模式,测得该车轴距为L=3010mm,轮距B=1925mm,内外侧车轮中心距=1755mm。
对左右前轮实验数据测算后得出下列对照曲线图:
下述图中曲线与阿克曼理论数值基本吻合,证明阿克曼转向理论在电动汽车上运用是切实可行的。
5 四驱电动汽车后轮转向控制方法优化步骤
(1)ECU将角度传感器和车速传感器信号通过CAN总线传递给后轮控制器;
(2)后轮控制器对车速进行计算,若车速高于25km/h,则执行步骤4,若车速低于25km/h,则执行步骤3;
(3)后轮转向控制器给后轮转向电机断电,由于电机不工作所以后轮不发生转向,前轮根据阿克曼理论起主导转向作用;

图2 左前轮实验数值与阿克曼理论数值对照
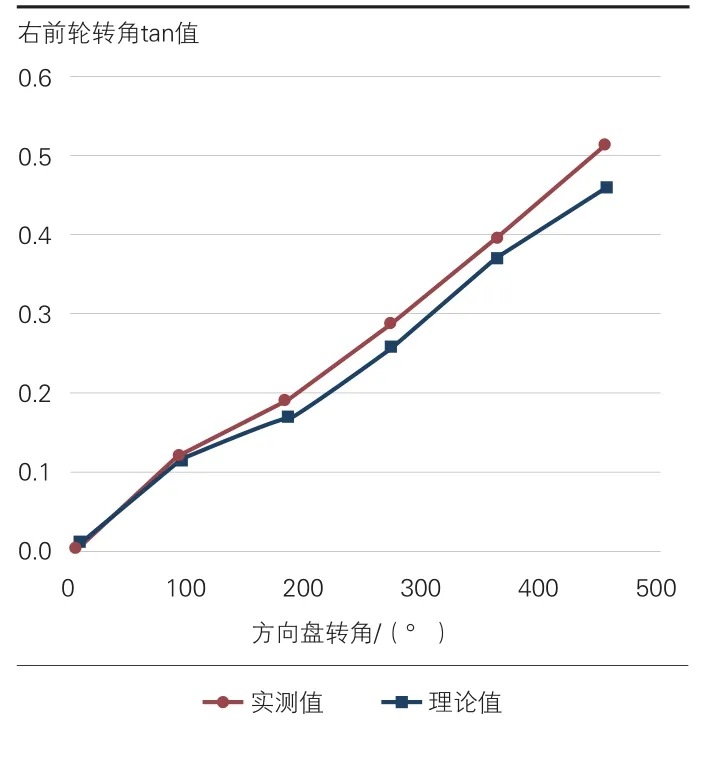
图3 右前轮实验数值与阿克曼理论数值对照
(4)后轮转向控制器计算出转向偏差值,得到后轮跟随转向角度;
(5)后轮位置传感器将转向电机转动的位置数据反馈给后轮转向控制器,并由其计算出实际后轮转向角度;
(6)后轮转向控制器对比预设计算出后轮跟随转向角度与实际后轮转向角度,得出两者的偏差值;
(7)后轮转向控制器将偏差值作为后轮转向电机的供电时间参考值,随后后轮转向电机根据通电时间转动相应的角度,一般规定电压信号左转为正电压,右转为负电压。
(8)后轮转向控制器不断计算误差值,直至误差值等于0,后轮不再介入电动汽车转向操作。
6 结语
根据布劳海特理论,电动汽车在运用阿克曼前轮转向理论的同时,控制后轮也适当地转向(控制在5度以下),可使电动汽车转向在高速时有良好的性能。同时在电动汽车转向机构的优化设计时,要考虑到优化设计变量和约束条件,转向机构的传动角应该在一定的范围之内,以防机构在运动过程中杆件受力过大。
总之,汽车转向机构的转向中心误差值越小,表明转向机构的转向特性越好,与阿克曼转向理论匹配程度越高。转向前束角有正负值之分,正值表明转向电动汽车转向程度过大,负值表明电动汽车转向程度不足,转向角前束越小则电动汽车转向特性越佳。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
数学大王·低年级(2021年2期)2021-02-21
小学生学习指导·爆笑校园(2019年6期)2019-09-10
汽车观察(2019年2期)2019-03-15
小猕猴智力画刊(2018年7期)2018-08-08
汽车维护与修理(2017年1期)2017-09-22
发明与创新·中学生(2016年7期)2016-05-14
红蜻蜓(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10
