
工业机器人在自动化控制中的应用研究
2018-05-28 06:54深圳市矽电半导体设备有限公司刘振辉
电子世界 2018年10期
深圳市矽电半导体设备有限公司 刘振辉
一、前言
随着科学技术的快速发展,工业机器人诞生了,并且已经广泛地应用在自动化控制领域中,工业机器人既需要自动控制技术和计算计技术,又需要传感器技术等,最近几年,人工智能技术已经广泛应用于各个领域[1]。工业机器人能够长时间进行重复和单调的体力劳动,还能够将许多人工作业进行有效地替代。
二、概述工业机器人控制系统
1.工业机器人的特点
其一,自由度比较高,对系统进行控制的过程中,具有很强的控制能力,而且,越加强控制能力,就会增加更多需要服伺的机构,同时,还会以自由度方式将服伺的各个机构表现出来,所以,为了使机器控制的能力更强,通常会具备比较高的自由度。针对于比较复杂的机器人而言,提高控制能力,自由度也会随着增加,从当前来看,最高自由度已经达到100以上;针对于比较简单的机器人而言,通常自由度有4个。
其二,工业机器人活动的过程中的路径比较多,但是,通常会有一个最好的路径。
其三,工业机器人运行的过程中,需要计算机高度的参与,有效对机器人运行进行控制,致使整个系统能够按照机器人的方式进行活动[2]。
2.工业机器人的功能
其一,再现示教。应用工业机器人控制系统以前,工作人员需要将相应信息输到机器人中,这些信息会被机器人储存到指定的位置上,人们想用这些信息时,以相应的方式提取信息,对所需信息人讲解,致使示教再现作用充分地发挥出来[3]。
其二,计算。结合机器人收集周围的信息,将相关环境的数据计算出来,并且根据这个数据,将相应作业轨迹制定出来,细化成控制各轴服伺运行的有效策略。在整个工业机器人控制系统中,这是最关键的一个环节。
其三,运动控制。就是有效运用相应的方式,致使机器人能够具有不同形态和移动的速度等[4]。
其四,反馈。机器控制系统运行的过程中,姿势和状态以及位置,都在不断地变化,这些变化会影响以后的工作,因此,机器人运行的同时,需要收集这些动态信息,并且,将这些信息反馈给主系统,致使主系统能够将整个系统实际的情况及时进行了解,结合实际的情况,将相应的策略制定出来。
三、工业机器人的控制系统组成
工业机器人包括示教盒、控制计算机、轴控制器、传感器接口以及辅助设备控制等几个部分。机器人控制系统组成,见图1所示。
工业机器人控制系统的使用的计算机,通常是微型计算机,或者是微处理器,控制系统综合的指挥调度机构就是控制计算机。示教盒有效运用串行通信方式,与主计算机交互信息,既具有CPU,又具有独立储存单元,对工作轨迹和参数以及人机交互示教进行设定,是示教盒主要的功能。传感器主要有三种:力觉传感器和视觉传感器以及触觉传感器,对信息进行检测是其的主要作用,从而使控制工业机器人的柔顺得以有效地实现[5]。轴控制既控制工业机器人的加速度和速度,又要控制工业机器人各个操作关节的位置。辅助设备控制主要将与工业机器人互相配合的辅助设备进行调节和控制。
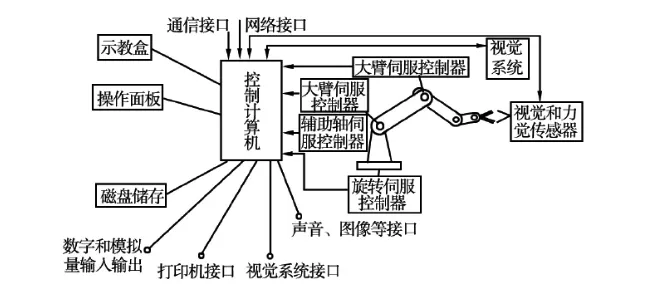
图1 机器人控制系统的组成
四、工业机器人控制系统的控制方式
1.点位控制
工业机器人的执行器作业过程中,只控制某些点位姿的控制方式。有效运用这种控制方式,对于工业机器人所要到达目标的工作轨迹不用进行规定,只规定工业机器人相邻各点的位置和运行速度就可以,要求工业机器人尽量在相邻的各点之间准确且快速地进行运动。
2.力矩控制
主要在装配物体和抓放物体作业时应用,要求准确地将位置确定,执行操作必须要应用适当力矩。
3.连续轨迹控制
连续控制工业机器人执行器进行作业中的位姿,既要规定工业机器人的运行轨迹,又要将工业机器人的位置精度和运行速度提出要求,工业机器人必须要在规定的速度和运行轨迹中进行运动,一定的运动精度必须要有效地实现,工业机器人将工作完成的过程中,既要运动平稳和速度可控,又要轨迹光滑[6]。
4.智能控制
工业机器人有效运用自身传感设备了解周围的环境,再结合内部存储的知识,将具体执行的决策做出来,这就是智能控制方式,有效运用智能控制方式,工业机器人既具备自学的能力,又具备很强的适应周围环境的能力。
五、工业机器人控制系统结构
1.主从式控制
科学技术在不断地发展,原来的机器人控制系统对于当前社会的要求已无法满足,先进机器人控制系统也逐渐地诞生了,也就是主从式结构的控制系统。例如,MOTORMAN弧焊机器人,该结构具有2台计算机,一台是整个系统的管理者,被称为“一级计算机”,具有编译机器人语言的功能和人机接口的作用,还能够利用运算性能,坐标转换轨迹数据,结构得到以后,视为关节运动增值量,传输到公共内存当中。另一台计算机能够有效地控制所有关节位置数值,被称作“二级计算机”,该计算机运行过程中,能够将内存中一级计算机的运算结果有效地读取,还能够将各关节处的数据向内存进行传输,给一级计算机顺利的运行打下基础。总线控制逻辑电路加上普通静态RAM构成公共内存,或者是容量几KB的RAM双口。因为功能有些分散不集中,使其的控制速度加快了,一般能够达到15毫秒,也就是15毫秒进行一次给定更改,控制活动完成。在该类结构控制系统中,利用内存将各个CPU进行连接,一次将交换信息的目的有效地实现,耦合在这种结构下非常松散,因此,对太多计算机进行耦合比较困难,只能将两台计算机完成耦合。
2.集中控制
集中控制就是工业机器人运行过程中,利用一台计算机来控制所有的活动,属于很早以前的一种控制结构,这种结构对计算机要求比较高,必须要具备很强的功能[7]。计算机技术在以往发展还不成熟,功能没有达到健全,生产的成本也比较高,因此,运用集中控制,既经济,又能够在实际中很好地进行使用。但是,集中控制的速度比较慢,而且内部比较复杂,这是一个很大的弊端,这种结构控制系统已经逐渐不用了,被淘汰了。
3.分布式控制
从当前来看,大部分工业机器人系统运用的都是分布式的控制结构,就是把整个管理系统分成两级,有效运用上一级主控计算机,来管理所有的系统,并且将轨迹插补的运算,对坐标进行转化。在下一级的模块中,具有很多个CPU,每一个关节都由一个处理器进行控制,利用其将控制的任务有效地完成,如此这样,既能够将控制效率有效地增强,还能够将处理水平有效地提升。上一级计算机与微处理器进行连接时,运用的是总线的方法。
六、工业机器人应用的领域
起初工业机器人在制造汽车行业进行应用,社会经济和科学技术都在快速地发展,工业机器人技术也在不断地发展和进步,很大程度地提升了工业机器人的功能,应用领域的规模不断地扩大。工业机器人在常规的环境下,能够将工人作业进行替代,针对于高温、高危险、有毒以及高热的环境下,工业机器人更能够将其作用充分地发挥出来。有些工作环境比较恶劣,有效运用工业机器人,能够代替人工进行繁重且重复性比较高的作业,既能够将工人的人身安全得以保证,又能够将企业生产效率有效地提升。工业机器人具有很多的优点,在自动化生产领域中,已经被广泛地应用,无论在特殊工作场合和恶劣的工作环境,还是高危工作等相关的方面,工业机器人都能够将优点充分地发挥出来[8]。
自动化生产的过程中,经常使用的工业机器人有检测、焊接、喷涂、搬运、喷漆以及装配等机器人。在自动化生产过中,检测机器人主要对零部件的尺寸进行确定,给零部件分类和对零部件的质量进行控制等;焊接机器人是承重大梁和对汽车结构进行焊接;材料搬运机器人应用于上下料、卸货、码垛以及定向抓取零件等;喷涂和喷漆机器人,主要进行喷涂和喷漆作业时进行应用,工业机器人做这项作业,自由度不能低于五个,为了使工业机器人能够方便地运行,工业机器人可以在导轨上进行作业;装配工作是所有生产环节中最复杂的一个环节,装配机器人,无论是视觉传感器和听觉传感器,还是接近传感器和触觉传感器等相关的各种传感器都必须要配备,从而使工业机器人能够顺利地进行装配工作。
七、总结
综上所述,科学技术和社会经济都在快速地发展,工业机器人无论是功能上,还是技术上,都很大程度地提高了,比较复杂的自动化控制已经得以有效地实现。随着科学技术的不断发展,工业自动化技术也在不断的进步和提升,工业机器人会更加广泛应用于各个领域,从而将更多的便利带给社会的生产活动。
[1]寇晓晨.工业机器人技术在自动化控制领域的运用[J].南方农机,2018,49(02):92+119.
[2]蔡济云.工业机器人在自动化控制中的应用研究[J].科技与创新,2018(01):144-145.
[3]金艳.工业机器人技术在自动化控制领域的应用探讨[J].中国设备工程,2017(19):151-152.
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代装饰(2018年5期)2018-05-26
黄河之声(2018年5期)2018-05-17
中国三峡(2017年2期)2017-06-09
Coco薇(2015年10期)2015-10-19
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
机械制造文摘(焊接分册)(2014年6期)2014-03-20
