
力矩电机的高精度伺服控制
2018-05-28 07:01北京卫星制造厂有限公司刘锏泽张仰成齐鑫哲
电子世界 2018年10期
北京卫星制造厂有限公司 刘锏泽 张仰成 盛 君 齐鑫哲
首先是测试伺服系统的性能指标;其次介绍功率电路的设计以及控制单元的构成,它们要以大扭矩的力矩电机中的全数字伺服驱动器作为基础,分析才能符合合理性的要求。
1.测试伺服系统性能指标
1.1 概述力矩电机
高性能力矩电机运用在低速高精度的大扭矩运动的数控机床之中,传统的歩进、直流、利用模拟控制的交流伺服技术已经不适应现在通讯电子技术以及计算机控制技术的应用,取而代之的是全数字控制的永磁同步的电机伺服系统,这是当代伺服控制的主流方法。力矩电机中的伺服控制当中,命令信号不断变化会自动准确地影响速度、位置以及输出转矩。伺服的控制系统作为自动控制系统会对输入的指令的信号进行跟踪,能够获取速度以及动力输出的精确数值。具体应用表现在工件的加工过程中伺服控制的精度,刀具给进位置的信息会被位置传感器传送给工控机,和设定的位置目标比较之后,工控机有停止切割以及继续给进的命令进行选择输出。
1.2 伺服系统性能指标的测试
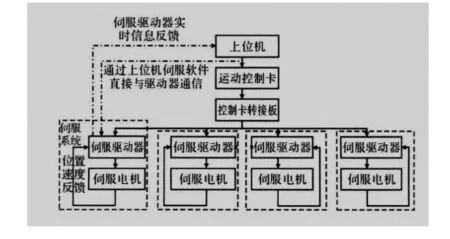
图1 伺服系统
对伺服电机的测试系统结构如图1,具体参数可从图中获知;但是本文主要对测试伺服系统指标进行阐述,分别有几点如下:
首先,伺服系统的稳定性;伺服系统消除干扰之后,系统能够恢复到原先的稳定状态的性能。具体指标表现在稳定状态的系统中时间足够短则,系统中的稳定性就可以判断为良好;反之,越来越强烈的等幅振荡状态在系统中出现就是不稳定状态。
其次,相应的特性;输入的指令变化决定着输出量的变化速度,同时也决定了伺服系统中的工作效率。有许多原因造成变化速度的不同,比如计算机的运行速度以及质量、阻尼运动等。
然后,工作的频率,输入信号符合伺服系统的频率范围之内;系统就会设定固定的工作频率信号,如果非此信号,系统就不能够在技术要求范围内正常的工作。
最后,系统的精度;高精度的伺服系统输入信号的重复出现量需要对精确程度有要求,否则会出现误差的情况,误差表现有静态、稳态、动态等。振荡衰减的形式是伺服系统的输入变化表达;动态误差是振荡过程以及幅度产生动态的系统误差。稳态误差,衰减到一定的程度以后会出现;静态误差由装配中的精度以及设备中零件的精度决定的。
2.高精度力矩电机的控制特性
高速的加工设备以及航空制造业中对直接驱动技术的采用越来越广泛,由于直接驱动技术拥有较高可靠性、刚性良好的传动系统、传动过程中没有间隙等较多优点,力矩电机、电主机以及直线电机皆采用此种技术。高精度伺服控制中,力矩电机可以匹配具备更高要求的刚性、抗干扰能力、鲁棒性的系统,想要具备高精度对力矩电机进行控制,就需要对力矩电机特点进行了解,利用复杂且先进的控制算法对力矩电机进行有效控制。
2.1 力矩电机伺服控制系统的组成

图2
图2就是力矩的电机伺服控制系统的构成框图,从图中可以看到系统主要有几大单元来组成:功率变换的电路单元、伺服控制单元、力矩电机、通讯的单元接口、反馈器件。
其中,伺服控制单元由速度、位置、电流、转矩控制器等组成。硬件上的主控芯片利用型号为TMS320F2812 DSP;其有不少的优势,比如硬件的简单性、较高的精度、较高的可靠性;设计力矩电机的数字交流伺服系统的时候,利用到主控芯片中几大优点更能够优化系统。RS232通讯接口作为通讯的接口单元,上位机指令着特定的通讯协议,然后根据不同的要求进行参数的传送,就能够让上位机监控或者调试伺服驱动器。
力矩电机的伺服系统中最重要的构成部分是传感器,交流电机的伺服系统优越性能想要实现,关键就是传感器是否能够准确地对系统运行的状态进行反映。电流的信号监测至少需要采样两相的电流,两相电流采样考虑到负载的对称性,每一相电流是根据两相电流的求和反获得的,采样电流根据霍尔传感器的原则,利用模拟电路将采样电流处理成3V电压范围之内。伺服控制系统工作过程需要设置对电路保护的措施;欠压、过压、电机过热、编码器故障、超速、位置超差等不同参数的保护措施要考虑到位;直接对开关脉冲进行封锁需要故障的信号经过逻辑电路才可以,同时从DSP中的I/0口输入,利用软件进行监测以实现系统的保护。
2.2 力矩电机的优势以及控制特性
本文分析的力矩电机是无框架的水冷永磁同步电动机,由二十二对磁极以及空心轴转子构成;而转子、定子、轴承、位置编码器、冷却的外壳组成了完整的电机。该电机具备不少的优点:
第一,精度具备零间隙、高定位;利用力矩电机的设备想要提高其精度,就可以通过该点来实现;直接驱动没有中间的机械传动环节阻碍,这样就能够快速实现传动,效率高。
第二,电机伺服的性能非常好。静态负载刚性以及高动态是直接驱动所具备的特性,位置环和速度环能够获得较高的闭环宽度。伺服系统中对负载的抵抗扰动能力和较快的响应速度获得皆受益于高宽带。
第三,机械设计的简化,免除了驱动维护;利用力矩电机之后,电机上没有维护件或者损耗件,这是工程设备中良好的状态体现。
第四,直接驱动;利用直接驱动的方式能够将传统电机的减速机构除去,如此就可以具备较高的可靠性能以及较高动态性能,能够为电机中的负载提供比较大的转矩。
控制的特性,力矩电机驱动系统中,负载受到电动机直接驱动缘故,电机会受到来自外界的不同的扰动,参数变化以及转矩的扰动会影响控制的性能;同时,较大转矩有波动时通常会受到大功率力矩电机影响,会导致伺服控制系统中控制性能严重的下降。不过不可排除的是电机直接被驱动时的意外情况,转矩波动是电机设计中不可消除的情况。所以,伺服电机控制方法之中,需要对转矩波动的抑制、电机非线性的抵消、系统鲁棒性的提高等进行优化才可。
3.结语
从高精度的伺服控制电机为主题去分析,不仅能够分析力矩电机的概念、测试伺服系统的指标;而且还能够对高精度力矩电机的控制特性进行阐述。这个过程必须要明确主控芯片,利用空间矢量控制获取高精度、高性能特性。伺服控制系统在商业价值上面会随着其性能指标的提高而有所突出,生产中的工件质量会被伺服系统的性能所决定,这就是本文分析的意义。
[1]龙满林,付永领,李光华,陈双桥.自抗扰算法在直流力矩电机伺服系统中的应用[J].中国机械工程,2012,23(09):1047-1050.
[2]高月波,王勉华,张国平,吴卫安.高性能高精度力矩电机伺服控制系统设计[J].微电机,2012,45(02):52-55.
[3]袁文,刘廷章,张国平,赵天锡.力矩电机伺服系统性能测试技术研究[J].微电机,2010,43(12):87-89+104.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
测控技术(2018年12期)2018-11-25
北京航空航天大学学报(2017年9期)2017-12-18
制造业自动化(2017年2期)2017-03-20
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年3期)2016-11-07
装备制造技术(2016年7期)2016-09-26
制造技术与机床(2016年3期)2016-08-31
测绘科学与工程(2016年6期)2016-04-17
北京航空航天大学学报(2016年4期)2016-02-27
