无人机轨道跟踪控制模型*
2018-05-25 05:39刘成,任利惠,左建勇
城市轨道交通研究 2018年5期
随着科技的进步,民用无人机技术已经成熟,现已经广泛应用于地图测绘、地质勘测、灾害监测、气象探测、空中交通管制、边境巡逻监控、通信中继、农药喷洒等作业中。在铁路上,无人机也得到应用,例如在杭州至海宁城际铁路项目中,利用无人机采集线路及车站站点图像,辅助进行路线规划和设计[1]。
目前,计算机视觉技术凭借着检测方法简单、检测设备无磨损、使用寿命长、维护简单等诸多优点,广泛使用于很多行业和场景,如车牌识别、交通管理、人脸识别、零件检测等。但是机器视觉在铁路方面的应用较少,还处于发展阶段。民用领域运用的无人机飞行需手动控制,自动飞行功能只能作为辅助飞行方式。因此,采用嵌入式系统进行直接图像处理,只传输必要的图像数据至地面站,并将处理完成的轨道信息作为无人机的控制信息,调整无人机的飞行方向,实现无人机领域的虚拟轨道飞行,是一个具有价值的研究方向[13]。采用这种方式能实现沿轨道无人机自动飞行与控制,充分发挥无人机、机器视觉的能力,在洪灾、地震、山体滑坡等自然灾害发生时,为了解轨道交通线的破坏情况,该方法具有很强的实用性和一定的远景应用价值。本文对无人机技术与计算机视觉技术进行结合,并将其应用于轨道交通领域,对使用计算机视觉技术实现无人机跟踪轨道飞行进行了探索,搭建了一个无人机图像采集与处理平台,对利用机器视觉实现无人机轨道跟踪控制模型进行验证。
1 方案设计
利用无人机、机载成像设备和计算机搭建了一个无人机轨道跟踪控制模型,如图1所示。
该模型的原理是利用机载成像设备对轨道区域进行成像,并将图像数据传至机载计算机进行图像处理,图像处理的结果传输至无人机控制系统,对无人机的飞行方向进行控制。

图1 无人机轨道跟踪飞行示意图
2 图像处理
该模型中最重要的部分是轨道图像的识别,本文利用OpenCV计算机视觉库,在Microsoft Visual Studio软件中对无人机采集的图像进行处理,实现了对轨道的识别。
2.1 图像载入与分割
图像处理的第一步是进行图片载入。本系统功能验证采用的机载成像设备所获取的图片大小为1 920像素×1 080像素。在图像处理过程中,未预先处理的图片不仅会造成图像处理时间长,还会在调试过程造成图片显示异常。因此,在载入读片后,对图片的宽度与高度作等比例缩小,缩小后的图片宽度设置为500像素。为了实现对轨道区域的检测,减小图像处理的时间,需要对图像进行适当分割。在该程序中,选择了图像下部2/3,距离左、右两侧1/5的区域为检测区域,并将其分割成独立的图像,以提高图像处理的速度。输入图像和分割后的图像如图2所示。
2.2 色彩空间转换与滤波
在本系统中,Canny边缘检测等函数的输入图像为单通道8位图像,因此需要对输入的彩色图像进行色彩空间转换。为此,本设计在载入图像后,将彩色图片转换为灰度图。
图像滤波是指在保留源图像特征条件下,抑制图像中的噪声,选择合适的滤波方法与滤波参数,能提高后续图像处理的可靠性和有效性。图像滤波有两条原则,不能破坏图像的轮廓和边缘等信息,以及保持滤波后的图像视觉效果好、图像清晰。通常采用的滤波方法有方框滤波、均值滤波、高斯滤波、中值滤波、双边滤波等5种。本设计采用高斯滤波法。
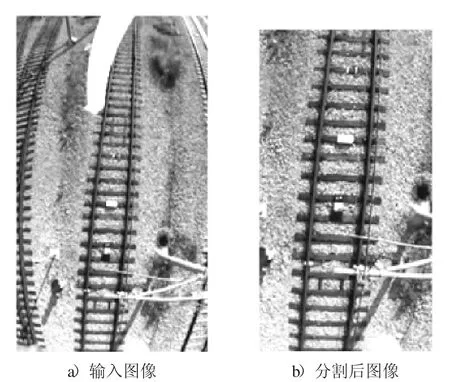
图2 载入图像并分割

式中:
A——幅值;
x0,y0——图片中心点的横、纵坐标;
σx,σy——像素值的均方差。
在OpenCV计算机视觉库中,高斯滤波函数为GaussianBlur(),有6个输入参数,分别为输入矩阵、输出矩阵、高斯内核大小、x方向的标准差、y方向的标准差和图像外部像素的边界类型。本设计中采用的内核大小为3×3,x与y方向的标准差都为0。
2.3 轨道连通区域检测
轨道区域在图像中是连续存在的,且钢轨的颜色较深,即灰度值小。根据这一特性,可采用检测连通区域的方法,将钢轨区域从图像中识别出来。连通区域检测是本设计的核心,是成功实现轨道识别的关键一步。
识别连通区域时,本文选择了最大稳定极值区域算法(MSER)。MSER的基本原理是:对灰度图像(灰度值为 0~255)进行二值化处理,阈值从 0到255逐渐递增。在处理完成后的所有二值图像中,图像中的某些连通区域变化很小或者无变化,则称该区域为最大稳定极值区域[2-10]。它的数学定义为:

高斯滤波是一种根据高斯函数的形状来选择滤波权值的线性滤波,可有效消除高斯噪声。通常采用二维零均值离散高斯函数作为图像的滤波函数。二维高斯函数为:
式中:
Qi——阈值为i时的某个连通区域的面积;
Δ——灰度阈值变化量;
q(i)——阈值为i时的Q区域的变化率。
当q(i)为局部极小值时,Qi则为最大稳定极值区域。
OpenCV计算机视觉库中使用MSER()函数对图片的连通区域进行检测,其输出结果为向量点集,其中每一个点集都是一个连通域。得到连通域后,对连通域进行矩形包围,并计算每个矩形间的重叠面积。接着对矩形面积进行排序,依次计算相邻两个矩形的重叠率,当矩形重叠率大于一定阈值(本设计中取0.3)时,将小的连通域排除。通过这种方法,可以弥补进行MSER检测时最小阈值可能设置太小带来的问题,并且可以将实际的钢轨区域进一步从连通区域剥离出来,减少轨道周围物体的干扰。检测结果见图3。

图3 钢轨连通区域检测
在完成钢轨的连通区域检测后,会发现连通区域不仅仅只有钢轨区域,轨枕等区域也会被检测出来,这是由于轨枕颜色、形状等与钢轨类似。为了提取出钢轨并进行钢轨区域分割,还需对连通区域进行边缘检测和直线检测。
2.4 边缘检测
针对连通区域的检测,本设计采用了Canny边缘提取算法[11]。本设计中,在进行边缘检测前,选择了3×3的高斯模糊函数对图像进行滤波,并将处理得到的边缘图与连通区域进行与运算,得到钢轨区域的边缘图(见图4)。
2.5 霍夫直线检测
经过上述边缘检测步骤后,得到了钢轨区域的边缘图(见图4 b))。在边缘图中,采用霍夫直线检测算法提取钢轨。霍夫变换是图像处理中的一种直线特征提取技术。该过程在一个参数空间中通过计算累计结果的局部最大值,得到一个符合该特定形状的集合作为霍夫变换结果。

图4 边缘检测
霍夫经典变换输出的矩阵中存储有检测出的直线矢量,每一条直线用具有2个元素的矢量(ρ,θ)表示,其中ρ表示直线到原点(图像左上角)的距离,θ表示直线与y轴之间的夹角(弧度,逆时针为正)。由于检测输出结果只有直线的相对位置信息,并不包含直线长度信息,因此直线的长度可以自由设定。
考虑到检测出的直线数可能大于2条,需对检测得到的直线进行筛选。通常情况下,图像中轨道近似于直线,其在图像中的长度也是最长的,因此可以计算出每条直线的长度,选出所有直线中的最长2条直线,作为2条轨道线。在计算检测出直线长度时,考虑到采集的图像高度比宽度大,直接计算每条直线与图像上、下边界的交点(x上,y上)、(x下,y下)。在OpenCV计算机视觉库中坐标系如图5所示,图像的左上角点为原点,长度方向为x轴,高度方向为y轴,因此y上=0,y下等于图像的高度,所以只需计算每个点的横坐标即可。图像的长度为l,高度为h,第i条直线的位置矢量为(ri,θi),则该条直线的2个交点的横坐标值计算式为:

完成钢轨区域的直线检测后,计算每条直线在图像中的长度,并对直线进行两两比较,筛选出最长的2条直线,视为钢轨,结果如图6所示。
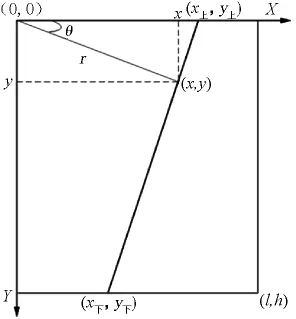
图5 直线位置示意图

图6 直线检测结果图
完成直线检测后,计算两直线在输入图像中的坐标和轨道中心线与输入图片上下边界交点的坐标,并将结果输出给无人机控制系统,对无人机的飞行方向进行调整[12]。
2.6 图像处理的试验结果
利用搭建的无人机平台采集了同济大学轨道交通综合试验线大量图像资料并进行了处理,从表1中可以得出,轨道识别正确率约为82.87%,错误率约12.35%,漏识别率为4.78%。

表1 轨道识别结果
3 结语
利用机载成像设备对轨道区域进行成像,并进行实时处理,将无人机相对轨道的位置信息传输至无人机控制系统,以控制无人机沿轨道自动飞行,其具有实现的可能性。
由于基于无人机的机器视觉在铁路上应用较少,有很多研究工作有待进行,包括多种影像获取(红外、多光谱、合成孔径雷达成像等)和更多铁路方面应用的研究(轨距测量、障碍物识别、扣件检测等),以及开发具有快速图像处理能力的嵌入式系统等。
参考文献
[1] 姜林波.无人机视频采集在轨道交通设计中的应用[J].交通建设,2016(4):229-230.
[2] 毛星云,冷雪飞.OpenCV3编程入门[M].北京:电子工业出版社,2015.
[3] KAEHLER A,BRADSKI G.Learning OpenCV3 computer vision in C++With the opencv library[M].Sebastopol,CA,USA:O′Reilly Media,Inc.,2017.
[4] 向荣,蒋荣欣.铁路机车快速超视距障碍物识别算法[J].湘潭大学自然科学学报,2013,35(2):103-108.
[5] 王昆.基于机器视觉对的轨道几何特征提取算法研究及实现[D].上海:上海工程技术大学,2015.
[6] 同磊.基于机器视觉的轨道交通线路异物检测技术研究[D].北京:北京交通大学,2012.
[7] SINGH M,SINGH S,JAISWAL J,et al.Autonomous rail track inspection using vision based system[C]∥IEEE International Conference on Computational Intelligence for Homeland Security and Personal Safety.Alexandria,VA,USA:IEEE,2006:56-59.
[8] RESENDIZ E,HART M,AHUJA N.Automated visual inspection of railroad tracks [J].IEEE Transactions on Intelligent Transportation Systems.2013,14(2):751-760.
[9] JARRETT C,PERRY K,STOL K A.Controller comparisons for autonomous railway following with a fixed-wing UAV[C]∥Proceedings of the 6th International Conference on Automation,Robotics and Applications,Queenstown,New Zealand:IEEE,2015:104-109.
[10] SONKA M,HLAVAC V.图像处理、分析与计算机视觉[M].北京:清华大学出版社,2016.
[11] 巨西诺,孙继银.一种改进的基于MSER算法的不变量提取算法[J].贵阳:贵州工业大学学报,2008,37(6):49-52.
[12] 李丹丹,侯涛,魏世鹏.基于改进Canny算子的铁轨边缘检测方法[J].电视技术,2015,39(8):55.
[13] 郑家良.无人机航迹规划与导航的方法研究及实现[D].成都:电子科技大学,2012.
[14] 李丹丹,侯涛,魏世鹏.基于改进Canny算子的铁轨边缘检测方法[J].电视技术,2015,39(8):55-58.
猜你喜欢
小天使·二年级语数英综合(2019年4期)2019-10-06
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2019年6期)2019-07-22
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
制造技术与机床(2017年8期)2017-11-27
电气化铁道(2016年4期)2016-04-16
电影故事(2015年16期)2015-07-14
中国铁道科学(2015年5期)2015-06-21
中国铁道科学(2015年4期)2015-06-21