
面向竞赛的果园喷药机器人设计
2018-05-24 07:09张少华史颖刚
机械工程与自动化 2018年2期
张少华,刘 富,刘 利,史颖刚
(西北农林科技大学 机械与电子工程学院,陕西 杨凌 712100)
1 问题的提出
果园喷药机器人比赛项目是中国服务机器人大赛的子项目,比赛场地如图1所示。在比赛过程中。机器人从起点区出发,经过A区、B区、C区、D区,分别进行对靶喷药、固定树形喷药和变树形喷药。
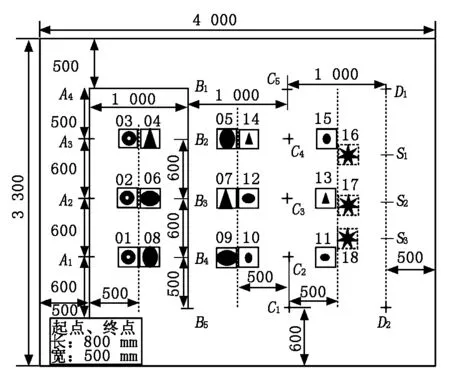
图1 喷药机器人比赛场地
A区为对靶喷药,有机器人行走引导线,有3个对靶喷药作业点A1、A2、A3,有喷药地点提示线,靶标图样如图2所示。B区为固定树形喷药,有机器人行走引导线,在喷药实施地点B2、B3、B4没有作业地点提示线,树形为三角形、竖椭圆形、平椭圆形,分别如图3、图4、图5所示。C区针对不同树龄的树形进行喷药,没有机器人行走引导线,在喷药作业地点C2、C3、C4有提示标志,树形大小为B区树形的90%和80%。D区没有机器人行走引导线,有3个模拟树形,大小为B区树形的70%,位置S1、S2、S3,由志愿者随机摆放。
2 系统整体设计
根据竞赛要求,设计的果园喷药服务机器人本体结构如图6所示,车体由铝合金板材制成,采用橡胶轮胎车轮,丝杠滑台固定在车体上,喷药平台支架安装在丝杠滑台上,喷头通过圆弧紧固件连接在喷药平台上。升降支架由铝合金型材制成,步进电机带动垂直连杆升降,实现喷头的升降[1-2]。

图2靶标图样图3三角形树形

图4竖椭圆形树形图5平椭圆形树形
喷药机器人控制系统的结构布局如图7所示,包括4个直流电机、1个车身底板,以及单片机控制系统电路板、前7路循迹模块、右侧循迹模块、检测树形的光电开关。在车体中心位置装有平面定位系统,对称安装的左、右两车轮的运动轨迹用左、右两码盘轮的运动轨迹来检测[3-4]。电机驱动器驱动直流电机正、反转,实现机器人的前进、后退、左转、右转等基本动作,以满足竞赛要求。

1-车轮;2-车体;3-喷头;4-丝杠滑台;5-喷药平台;6-增压泵;7-码盘电机;8-药箱

图7 喷药机器人控制系统结构布局图
图8为喷药机器人实物图。

图8 喷药机器人
3 电气系统设计
机器人电气系统的主控制器采用STC15F2K60S2,驱动4个直流电机实现机器人基本运动,使用前7路循迹模块、右循迹模块、光电开关、平面定位系统控制机器人进行循迹定位,采用步进电机驱动器控制丝杠滑台升降,结合电磁阀和增压泵组成喷药系统模块,电气系统总体架构如图9所示。其中,定位系统采用PPS-9F浮动平面定位系统,它集成了陀螺仪、加速度计、磁力计和编码器,直接输出机器人的角度与坐标信息,数据包括机器人位置的x、y坐标值和角度angle值。
在比赛过程中,有循迹白线的区域,结合前7路循迹模块、右侧循迹模块和光电开关,使机器人停在指定位置。A区只需采用前7路循迹,A区向B区行进中,采用前7路循迹和右侧循迹进行导航定位,右侧循迹用来确定右转位置,B区采用前7路循迹和光电开关导航定位,C区采用PPS-9F浮动平面定位系统进行定位,D区采用光电开关识别靶标,结合平面定位系统使机器人直线行走,同时保证机器人喷头大致垂直于靶标。
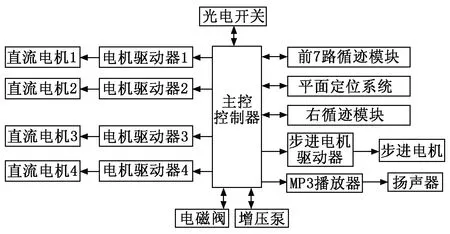
图9 电气系统总体架构
喷药系统由步进电机丝杠滑台、电磁阀、增压泵、电磁继电器、喷头和软管组成。主控制器驱动步进电机转动,丝杠滑台带动喷药平台升降,确定机器人的喷药位置;喷头安装在喷药平台上,通过软管连接到电磁阀,电磁阀接到增压泵的出水口。主控制器通过电磁继电器控制增压泵和电磁阀的开闭,控制喷药时间。在机器人的循迹定位系统确定靶标位置后,喷药系统根据预定的喷药位置,驱动喷药平台上下移动,进行药液喷射。
为满足机器人快速响应和频繁启停控制,采用四路H桥双L298N电机驱动模块控制4个直流电机,用12 V直流电源为机器人供电。电机驱动模块中的IN1~IN8控制4个直流电机的正反转;ENA~END四个使能端,跳线连接时全速运行,跳线不连时给EN1、EN2输入PWM信号进行调速。
4 软件系统设计
4.1 机器人基本运动程序设计
L298N电机驱动芯片的两个IN口接收单片机发来的两位数字信号,控制电机的正、反转,每个电机需要IN1、IN2和ENA端的3个控制信号。选用一路PWM连接使能信号EN1引脚,通过调整PWM占空比,调整电机转速,IN1、IN2为电机转动方向控制信号, IN1、IN2分别为1、0时,电机正转,反之,电机反转。直流电机正反转的逻辑如表1所示[5-6]。

表1 直流电机正反转真值表
左前轮、右前轮、左后轮、右后轮分别为轮1、轮2、轮3、轮4,将单片机的P1_0、P1_1、…、P1_7依次与电机驱动芯片的IN1、IN2、…、IN8连接,则每个电机对应P1_0、P1_1、…、P1_7中的两个IO口。然后,设置单片机P1口的输出高低电平,就可实现机器人的前进、后退、左转、右转、停止等动作,通过车轮差速实现机器人转弯[7]。机器人基本动作控制如表2所示。
4.2 循迹子程序设计
机器人循迹模块采用灰度传感器,传感器发射管发射光线到路面,遇到白色胶带引导线被反射,接收管接收到反射光,经施密特触发器整形后输出低电平;发射光遇到深绿色地毯被吸收,施密特触发器整形后输出高电平。前方7路循迹传感器的标号从左到右分别是Z1、Z2、Z3、M、Y3、Y2、Y1。当左侧Z1、Z2、Z3中的任何一个传感器检测到白线时,机器人右转,当右侧Y3、Y2、Y1中任何一个传感器检测到白线时,机器人左转,中间传感器M检测到白线,直行。前7路循迹的工作流程如图10所示[8]。

表2 机器人基本动作真值表

图10 前7路循迹的程序流程
右侧循迹模块和光电开关是前7路循迹的辅助模块。机器人行走到右转直角白线处时,右侧循迹模块首先扫到转弯标识,随后触发外部中断0,中断子程序为定时右转,然后,机器人继续循迹。机器人循迹中,若通过光电开关扫描到靶标,传给单片机一个低电平,机器人停止,进行喷药作业。
4.3 定位子程序设计
平面定位系统安装在机器人的旋转中心,采用二维极坐标。机器人启动后,平面定位系统数据初始化,确定机器人最开始位置为原点,即x、y和angle值全为0。机器人运动后,定位系统会采集机器人的位置坐标和转动角度,实时传回数据,包括机器人位置的x、y坐标值和angle角度值。单片机进行数据处理,与预先设定的数值进行比较、判断。若实时数据值与预先设定值的差值在误差范围内,机器人继续进行下一动作,若超过误差范围,机器人通过前进、后退、左转、右转动作对位置和角度进行校正,达到误差范围后,机器人停止校正,接着进行下一步的动作。机器人平面定位工作流程如图11所示。
4.4 喷药子程序设计
喷药流程由单片机程序控制,单片机给定电磁继电器的接通时间,通过控制电磁阀和增压泵的通断电时间来控制喷药时间。单片机控制丝杆滑台的升降,确定喷药位置,喷药时,从靶标的最低位置开始,通过丝杠滑台的升起距离,确定其余的喷药作业位置。面积较大的地方采用多次喷射,面积小的部分单次喷射即可[9]。喷药子程序流程如图12所示。
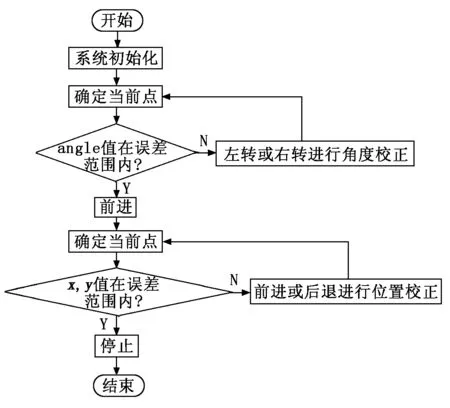
图11 机器人平面定位流程

图12 喷药子程序流程
4.5 主控制程序
机器人主控器与喷药控制器、循迹传感器、电机驱动器结合,控制机器人的循迹、定位、喷药动作。采用光电开关检测喷药靶标,然后主控制器控制丝杠滑台的上下运动、水泵和电磁阀的开闭,实现喷药功能。平面定位系统实时传回位置坐标,与设定值进行比较判断,再进行位置校正,使机器人行驶到设定位置,进行喷药作业。喷药机器人主程序流程如图13所示。
5 结语
根据竞赛要求,设计了果园喷药机器人机械本体,又以STC15F260S2为主控芯片设计了控制系统与程序,采用增压泵和电磁阀的组合控制,实现了固定位置喷药,控制继电器通断时间实现了喷药时间控制。经过实地调试,参加了竞赛,得到了良好的效果。
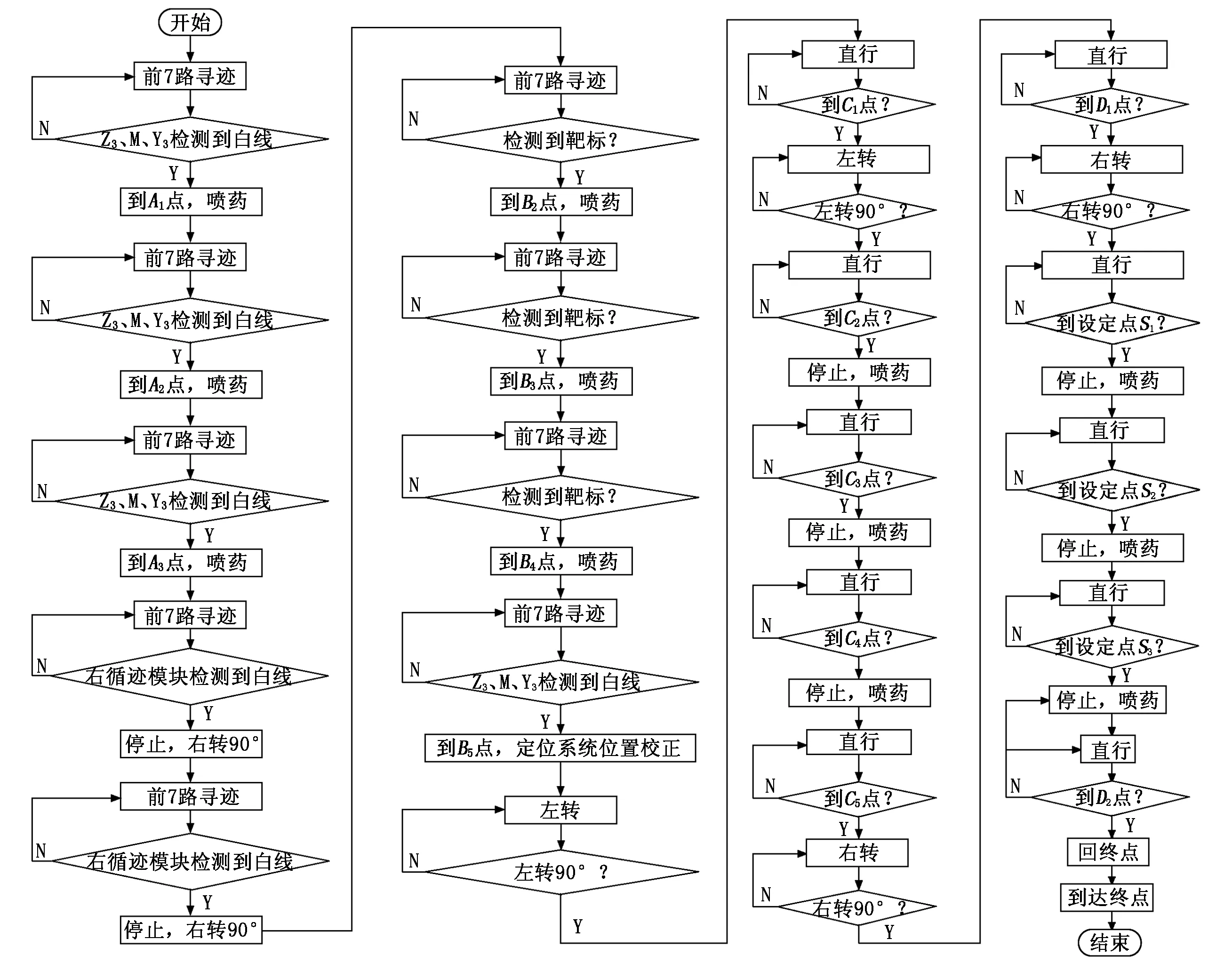
图13 喷药机器人主程序流程
参考文献:
[1] 孙雪,姚名晖,宋朋.果园喷药机器人的创新设计[J].安徽农业科学,2013,41(30):12204-12206.
[2] 邵欣,王峰,张建新,等.一种可越障的抛投机器人设计[J].实验室研究与探索,2017,36(6):47-50,54.
[3] 师树恒,曹阳,师素娟.一种直立智能循迹机器人的设计[J].自动化仪表,2014,35(2):66-68.
[4] 刘林,孙冬梅.智能车路径识别及控制策略的研究[J].机床与液压,2012,40(13):82-84.
[5] 梁明亮,孙逸洁.基于轮式驱动的教学机器人研制[J].实验室研究与探索,2013,32(2):227-230.
[6] 季聪,王思明,汉鹏武.智能车路径识别与控制研究[J].电视技术,2013,37(9):192-195.
[7] 刘涛,吕勇,刘立双.智能车路径识别与控制性能提高方法研究及实现[J].电子技术应用,2016,42(1):54-57.
[8] 张磊,蒋刚,肖志峰,等.MEMS陀螺与编码器在机器人自主定位中的应用[J].机械设计与制造,2011(9):142-144.
[9] 李锟,王洪臣,郑晓培,等.微型喷药机构型设计与仿真分析[J].农机化研究,2017,39(8):72-76.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
石油和化工设备(2022年5期)2022-07-11
河北果树(2021年4期)2021-12-02
水泵技术(2021年3期)2021-08-14
烟台果树(2021年2期)2021-07-21
水泵技术(2021年6期)2021-02-16
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
水电站机电技术(2019年2期)2019-03-08
现代园艺(2017年19期)2018-01-19
现代园艺(2017年13期)2018-01-19
