
起升机构控制策略对制动距离的影响分析
2018-05-23 05:48于印稳,范开英,邵秋波
建筑机械化 2018年3期
起升机构是起重机械必须具备的、使物品获得升降运动的基本组成。起升机构工况的好坏将直接影响整台起重机的工作性能。起升速度的选择与起重量、起升高度、工作级别和使用要求有关,中、小起重量的起重机选用高速以提高生产率;大起重量的起重机选用低速以降低驱动功率,提高工作的平稳性和安全性。用于安装与设备维修的起重机除选用低速外,还可配备有微速或调试功能。
起升机构主要由驱动装置、传动装置、卷筒、滑轮组、取物装置和制动装置组成。制动装置是影响制动距离的主要因素,此外还与起升机构的其他部件有着密切的关系。
1 一般工况的制动距离
起重机设计规范规定:对吊钩起重机,重物在下降制动时的制动距离(机构控制器处在下降速度的最低档稳定运行,拉回零位后,从制动器断电至重物停止时的下滑距离)不应大于1min内稳定起升距离的1/65。
在正常起升过程中,重物就位前,通过电气控制将速度降到最低档,保持最低稳定速度运行,电机传导到钢丝绳的扭矩与重物对卷筒的扭矩相同。此时制动器开始动作,在制动力矩的作用下转速下降,直至重物停止[1]。
制动前,重物匀速运动,卷筒钢丝绳的主动扭矩T卷与重物产生的扭矩T重平衡,有

起升速度为v,卷筒直径为D,则卷筒的角速度ω为
制动器安装在电机输出轴上,重物减速时间T制取决于卷筒的初始速度ω和制动角加速度α。

卷筒的制动角加速度与制动力矩有关,也和制动加转动部分的转动惯量有关

式中J卷— 起升机构换算到电机卷筒位置的转动惯量;
J重— 起升载荷G换算到电机轴的转动惯量。
通常低速制动时间很短,全速制动的时间约为1s,低速制动的时间约为0.1s,制动距离约为1min内稳定起升距离的1/100。在制动器调整设置时以此距离作为调整合格的依据。
2 突然断电状态下的制动距离
起重机突然断电后,或者起重机按下急停按钮时,电机立即断电,制动器失去动力后在弹簧或者液压的恢复力下迅速抱闸,由于机械动作需要时间,在达到满制动力矩之前有时间滞后,通常制动器的时间延迟为0.2~0.3s。制动闸瓦开始接触到最大制动力矩的过程,制动力矩在延时的时间里为0,此时间阶段t1电机的输出扭矩为
起升截荷质量为m,在重力作用下加速运动,钢丝绳运动从重物到卷筒由直线运动变为转动,由于起升机构部件的卷动惯量存在重物加速度a1小于重力加速度g。
起升载荷作为恒定载荷,卷筒及电机作为阻力,其阻力值f与卷筒角加速度有关重物的线加速度a1和卷筒的角加速度α1为线性关系
其中卷筒阻力非定值,与卷筒的转动惯量和卷筒的角加速度a1为线性关系,卷筒转矩为
由推导公式可知,断电加速度a1与起升机构自有特性有关,与操作无关。
断电时的起升速度为v0,延时时间末t1的重物速度v1为
当制动器达到满制动力矩后,在制动力矩的作用下,转速下降直至重物停止运动。卷筒的外载荷和加速度为
从制动器作用到重物和卷筒制动停止的时间t2为
断电后的制动总时间t为
总制动距离l为
以上过程均为理论过程,精确计算还要考虑机械传动效率的影响。
为简化计算,设制动器的安全系数为n,则有
由此可推导出下降总时间与制动延时和制动时初始速度的关系为

按照相同假设条件,推导出下降总距离与制动延时和制动时初始速度的关系为:

3 起升制动的延时控制
在起升机构电气设计时,可通过调整延时制动协调电机和制动器的动作顺序时间,若电机停止与制动器合闸同时动作,上式可简化为
若电机动作延迟到重物停止移动之后,则驱动扭矩与重物产生的扭矩相同,上式变更为
在设备安装检修的场合,使用的起重机通常还有点动距离的要求。在起升点动过程中,起重机实现了一次加速和一次减速过程。减速过程与正常状态的制动分析基本一致,加速过程是其逆过程,但也有差异。为了获得较小的点动位移,实现精准就位,通常延长加速时间[2],使重物在人为操作的反应时间里速度增量减小,使点动最大速度降低,减少加速过程的位移。减速过程与制动过程相同,初始速度低,制动加速度大,迅速合闸,实现较小位移。
假设操作时间为人的反应时间t1,设备达到满速时间设置为tn,制动力矩安全系数为n,则点动距离为
人工操作的时间是基本固定的,电机从启动到满速的时间可以通过设置来实现。简化计算时可忽略后半高阶项。
对于速度30m/min的设备,人工操作时间间隔0.1s,加速时间控制到3~5s,理论控制精度可达1mm。
4 算例分析
以某桥式起重机起升机构为例,制动器的时间延迟为0.2s,起升机构断电后加速度为1.36m/s2,制动器安全系数为2.5,以速度为计算参数,分析不同制动策略的制动距离。图1为不同控制策略下的制动距离。
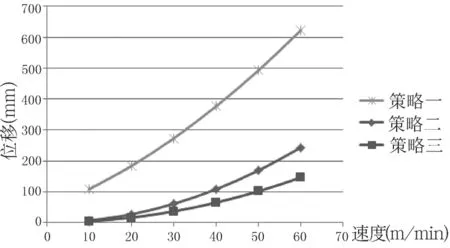
图1 不同控制策略下的制动距离
策略一为不采取任何控制的制动距离,与断电状态相同,策略二为电机停止与制动器合闸同时动作的制动距离,策略三为电机动作延迟到重物停止移动后的制动距离。由图1可知,采取了延时制动策略后,制动后的位移量显著减少,有利于精度的控制。另外,初始速度越低,则制动距离越小,在点动控制时,延长启动时间,获得较小的初始速度,能有效地提高就位精度。
5 结 论
随着起重设备智能化的进步,对精准就位要求从人工操作逐渐转为智能控制,需要从理论上分析起升机构固有特性对制动精度的影响。本文总结了起升机构制动过程的3种工况,重点对突然断电的制动全过程进行了分析,对起升机构中对制动时间和制动距离有影响的各个部件建立了关联,推导了起升制动性能的精确计算公式。
1)分析了起升机构制动过程不同控制策略的载荷组合,以及对位移的影响,给出了制动距离计算的理论公式,为工程应用提供了依据。
2)起升机构制动最恶劣的工况是突然断电,为减少重物下滑对环境的影响,在有严格要求的场合应设置断电保护,延长电机工作时间至制动器完全动作。
3)起升机构的精准控制可通过电气控制动作顺序和延长起制动时间提高,对于点动需要控制位移的场合效果尤为明显。
[参考文献]
[1]叶 勇.起重机起升制动器制动距离和时间的计算[J].起重运输机械,2012,(12):19-21.
[2]范开英,沈兰华,史海红.塔机回转力矩在设计中的控制比较[J].建筑机械化,2015,(9):30-32.
[3]张志文.《起重机设计手册》(第一版)[M].北京:中国铁道出版社,2001.
猜你喜欢
中国修船(2022年2期)2022-04-28
防爆电机(2020年3期)2020-11-06
重型机械(2020年2期)2020-07-24
电子制作(2019年14期)2019-08-20
船舶与海洋工程(2018年5期)2018-11-14
发明与创新·中学生(2018年10期)2018-10-15
意林·少年版(2018年2期)2018-02-07
家庭百事通·健康一点通(2017年9期)2017-09-22
创新作文(1-2年级)(2017年1期)2017-04-19
少年科学(2015年9期)2015-10-14
