
加拿大移动服务系统地面遥操作模式综述
2018-05-22 00:43:48郭祥艳刘传凯王晓雪
深空探测学报 2018年1期
郭祥艳,刘传凯,王晓雪
(1. 北京航天飞行控制中心,北京 100094;2. 航天飞行动力学技术重点实验室,北京 100094)
0 引 言
按照我国空间站工程总体规划,将在2020年前后,建成和运营近地载人空间站[1]。在空间站最初建造及后期运行过程中,大多数舱外活动必须借助于机械臂,机械臂对于空间站在轨组装、外部维修以及日常运行维护起着至关重要的作用。目前,国际空间站最具代表性的舱外机械臂系统是安装在美国舱段上的加拿大移动服务系统(Mobile Satellite Services, MSS),该系统主要包含一个大型遥操作臂系统(SSRMS)和一个特殊用途灵巧操作臂(SPDM),此外,空间站上的大型舱外机器人系统还包括俄罗斯舱段上的欧洲臂(ERA)和日本实验舱上的远程机械臂系统(JEMRMS)[2-8]。针对空间站的搭建和维护任务,我国于2007年开始中国空间站远程机械臂系统(CSSRMS)的研制[9]。CSSRMS由核心舱机械臂(CMM)和实验舱机械臂组成(EMM),当前CMM可实现技术性能指标与国际空间站上机械臂对比情况如表1所示[10-13]。
由表1可知,CMM的各项技术指标均与当前国际空间站上机械臂水平相当,其中载荷能力、位姿精度和移动速度等关键指标和SSRMS比较接近。
基于当前正在开展的CSSRMS地面遥操作仿真验证工作[14],本文重点关注与我国空间站机械臂构型和技术指标接近的MSS系统,主要对MSS地面遥操作控制模式进行调研,分析MSS地面遥操作系统面临的挑战及采取的应对措施,概述MSS地面遥操作任务规划、执行和在轨调试过程,以期对未来我国空间站机械臂地面遥操作控制提供参考。
1 MSS系统构成及控制模式演变
MSS是由加拿大和美国国家航空航天局(NASA)联合研制的舱外机械臂系统,其主要由5个子系统构成[15]:①机械臂工作站(RWS);②空间站遥控机械臂系统SSRMS;③移动基座系统(MBS);④移动运输装置(MT);⑤SPDM,如图1所示。其中,RWS是MSS唯一布置在舱内的组件。RWS包括手动控制器、监视器、控制面板(DCP)和笔记本电脑(PCS)(作为MSS在轨操作的接口)。除此之外,RWS也控制着MSS上的中央处理计算机单元(CEU),该单元是MSS和ISS上指令和控制计算机(C&C)之间的接口;SSRMS安装于MBS上,MBS为SSRMS提供了4个电源数据抓杆固定器(PDGF),通过SSRMS上与之相连的锁式末端效应器(LEE),PDGF不仅为SSRMS提供电能及数据与视频信号,而且提供移行据点。SSRMS的任一端均可与PDGF相连,以类似尺蠖移行的方式,双端交互地移动,到达ISS许多部位[16]。SSRMS与空间站通过MT连接,可以沿着位于空间站桁架外侧的固定轨道滑动,大大扩展了机械臂的工作范围。SPDM也叫Dextre[17]于2008年由“ 奋进号 ”(STS Endeavour OV–105)PDGF 航天飞机送至国际空间站,Dextre拥有两个手臂,并具有工具抓手和手臂关节,用来执行一些维修任务,这些任务以往通常需要航天员出舱活动才能完成,大大提升了机械臂承担空间作业的操作精度和复杂性。
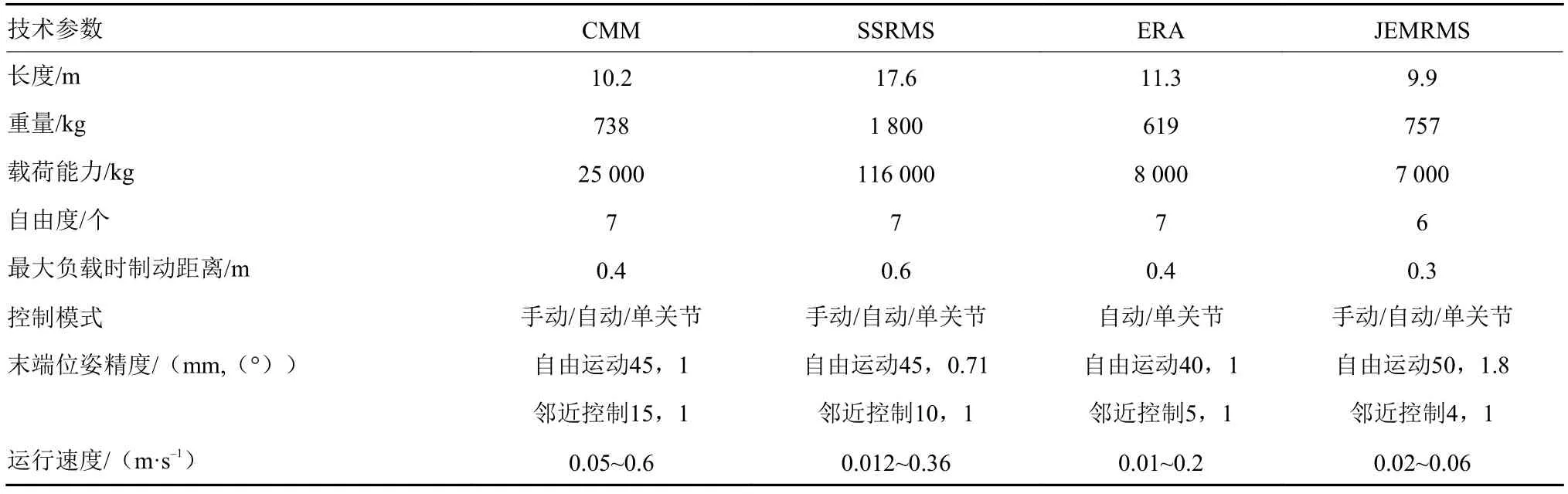
表1 CSSRMS与空间站上机械臂性能指标比较Table 1 Performance comparison of CSSRMS and other manipulators
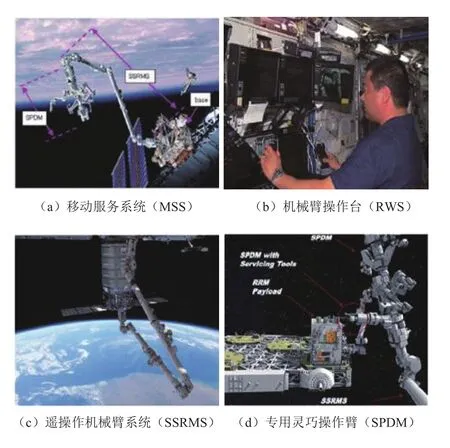
图1 加拿大MSS系统构成Fig. 1 The system configuration of Canadian MSS system
MSS最初设计时仅考虑航天员在轨操作模式,其构成中的SSRMS是基于航天飞机遥操作机械臂系统(SRMS)发展而来的,因此其控制方式主要依靠有人在内的闭环操作模式,即由航天员在国际空间站内使用手动控制器操纵机械臂,所有机械装置的运动指令都是由航天员使用DCP上的手动控制器和物理转换器发出,同时使用视频监视器监视指令执行过程。由于机械臂关节和锁式末端效应器的运动指令只能通过DCP上的硬件开关发送,地面不能发送任何运动指令,但是地面能够发送设备开关机、视频系统配置等软指令,这些软指令通过ISS上指令和控制计算机发送给MSS的中央处理计算机。
随着SSRMS操作经验的逐步丰富,航天员在舱内控制机械臂的操作模式出现许多新的问题:一是随着机械臂复杂程度的提高,在地面培训航天员进行机械臂操作并维持其在轨时的正常操作水平所耗费的时间显著增加;二是机械臂操作任务大都错综复杂,通常需占用航天员大量的时间,而国际空间站宇航员每天仅限6.5 h的工作时间无法完成复杂的Dextre维护操作;三是通过对Dextre维护操作分析发现,相对于实际更换失效组件而言,宇航员大量的时间都花费在空闲部件恢复和操作现场准备上。因此,2002年在加拿大空间局(Canadian Space Agency, CSA)和NASA联合举办的技术交流大会上提出了发展地面遥操作模式的解决方案[15],即对于部分常规例行检测任务,通过地面遥操作的方式实现。2005年,CSA首次实现了SSRMS受限的地面遥操作,从实现了自由空间的小型机动,到逐渐发展为不限制运动规模的联合关节运动[18]。
2 MSS地面遥操作模式及其约束条件
CSA实现MSS地面遥操作控制过程中主要面临以下几方面的挑战:①从工程角度来说,地面遥操作面临的最大挑战是地面控制指令和遥测信号的时延,典型的观测时延达到3~10 s,时延加大了操作者响应系统行为的时间,影响了遥操作系统的稳定性;②从操作角度来说,面临的主要挑战是ISS和地面控制站之间缺乏持续的通信流,在通信中断或受限时段,地面操作者无法通过遥测和视觉信号监视SSRMS运动过程及其与空间站本体之间的间隙,从而限定了地面控制人员可操作时间;③从设计角度来说,挑战在于地面遥操作控制中心要尽可能使用目前发往ISS地面指令结构,不要有复杂的或不必要的硬件或软件更改。为了解决上述问题,CSA通过地面遥操作模式的选择和附加相应的约束条件来实现。
2.1 地面遥操作模式
地面遥操作模式的选择与MSS在轨操作控制模式相关,在介绍地面遥操作模式之前,有必要首先对MSS在轨控制模式进行分析。
MSS在轨航天员通过手动和自主两种模式来控制机械臂[19]。在手动模式下,MSS中央处理计算机将操作者手动输入转化为关节运动指令,其中手动控制器偏转转化为关节速率指令。手动控制要求操作者是闭环控制回路的一部分,操作者可以通过遥测信息或RWS上的视频显示器来调整手动控制器输入[20-21]。在自主模式下,操作者在计算机中输入机械臂起始位置和目标位置等配置信息,由中央处理计算机设计机械臂的运动轨迹,具体可以通过两种方式实现:一种是操作者指定机械臂末端或附加载荷6自由度的直角坐标,机械臂末端或载荷的速率指令由计算机产生,其仅需按照指令要求运动到指定的目的位置;另一种方式是由操作者指定机械臂目标关节角配置,之后由计算机控制机械臂所有关节同时到达最终构型。通常来说,手动控制方式经常用于邻近和接触操作,自主模式主要用于长距离移动操作。
相对于在轨操作而言,地面遥操作控制方式也有手动和自主两种。在手动模式下,机械臂和地面遥操作中心之间信号传输的延时问题尤为突出。由于延时的存在,地面操作员的输入是响应操作者观察到的机械臂系统10 s之前的行为,与在轨操作相比,系统延时拉大了地面操作者10 s的反应时间,考虑机械臂此时的运动速度及空间站本体的间隙和操作类型等,5~10 s的延时可能会导致严重的后果。除此之外,地面手动控制机械臂需要操作者经常性地输入控制参数以控制机械臂末端或有效载荷的运动,因此在地面与空间站通信中断期间,控制回路出现中断,此时还需要调用应急处理机制来中断机械臂关节运动。
相对而言,自主控制模式不要求地面和空间站之间频繁的通信,同时不受系统延时的影响。操作者不是闭环控制回路的组成,因此不需要经常性向机械臂控制系统输入控制信息。因此,MSS地面遥操作应选用自主控制模式,所有由地面遥操作中心发起的机械臂运动将依靠预编程的自主控制模式实现[15]。在这种模式下,地面操作者通过人机交互接口对机械臂进行编程,编程的结果是一段连续的运动轨迹,并在地面仿真验证中心进行验证,只有经过验证的轨迹才能发送到空间机械臂在轨执行。空间机械臂接收到来自地面的符号指令后,在与空间站环境的交互过程中形成远端的闭合回路,将时延排除在地空控制回路之外,从而避免了地空大时延带来的影响。
2.2 地面遥操作模式的约束条件
MSS地面遥操作单独使用自主模式控制SSRMS的不足之处为:违背在轨操作实际,特别是在SSRMS邻近和接触负载过程中,操作者需要通过相机观察SSRMS末端或者附加载荷的位置,并用手动控制器来纠正偏差,以此来控制SSRMS,但是对地面操作者来说,由于延时和通信弧段的限制,地面无法连续监视SSRMS任务执行过程。尽管在自主模式下不要求操作者经常性的输入,但是操作者仍需具备SSRMS任务执行过程中的环境感知能力,以确保机械臂与空间站本体之间的间隙及匹配接口间的精度。
针对上述问题,MSS地面遥操作控制中心把任务执行过程和间隙监视及精度验证隔离开来。这一功能主要是通过对地面遥操作施加了一系列操作约束来实现的,具体总结如下:
1)地面控制策略须经模拟器验证之后才能发送到MSS在轨执行。
相对于手动控制而言,自主控制模式的优越性在于它能生成唯一确定的轨迹,地面遥操作中心根据SSRMS起始和目的地的位置坐标,估算出一个精确的、可重复验证的轨迹,在此过程中不需要操作者频繁地修正输入。SSRMS地面轨迹生成之后,将在封装了各种飞行软件和空间站环境模型的模拟器中验证,只有经过验证的轨迹才可发送到空间站执行。仿真验证过程中若发现机械臂的运动出现偏差或有参数异常时,由数据处理与任务仿真平台给出偏差修正量或者新的路径规划。
2)对机械臂操作空间的视觉测量优先于控制策略的预先规划。
MSS地面遥操作中心根据对空间站环境和机械臂的先验知识在地面建立仿真模型,在具体任务实施过程中,首先使用视觉相机采集机械臂规划路径周围的环境参数,之后将获得的空间站当前状态和参数融合到地面仿真系统中,使得空间站外部环境的变化能够在用于轨迹规划和验证的图形模型中及时反映出来。
3)机械臂抓取目标之前需要使用相机视觉图像对两者之间对准精度进行验证。
机械臂在抓取目标之前,地面操作者需要利用末端执行器和操作接口间的多相机视觉图像对两者的对准精度进行验证,对准验证过程中可以使用断点中断操作,在断点处操作者可以使用相机图像检查对准并进行必要的修正操作。
4)地面遥操作执行段限定为地空通信弧段内。
CSA地面遥操作中心将地面遥操作限定在规划的地空通信时间段内执行,期间机械臂在空间的各项参数通过遥测传到地面后,由数据传输系统将其实时地传递给数据处理和任务仿真平台,进行机械臂运动轨迹以及各项检测参数的运算和仿真分析,与任务路径规划相对照,其结果和各种参数与图像实时地显示在地面监视控制系统中。尽管地面遥操作设计模式不需要地空之间持续的通信流,但是这项特殊的约束不仅能为地面操作者提供监视任务执行的功能,也为地面遥操作提供了额外的安全保障。为进一步减小任务执行过程中通信中断的可能,地面遥操作SSRMS一次机动距离为5英尺①。
3 MSS地面遥操作过程分析
MSS地面遥操作控制过程包括任务规划、任务执行和在轨调试3个阶段,具体如下:
3.1 任务规划
任务规划主要功能是分解空间遥操作任务,并生成相应的任务序列或空间站机械臂运动数据。MSS任务规划可以概括为以下六大方面的工作[22]:①机械臂轨迹设计;②地面操作流程开发和验证;③指令脚本的开发和确认;④特定任务软件配置文件的生成;⑤动力学和热平衡分析;⑥与国际空间站其他活动的融合。
MSS将要执行的任务确定之后,地面首先使用机器人规划系统(RPS)设计SSRMS和Dextre的运动轨迹。RPS是一个运动图形模拟器(KPS),它能够高精度地仿真空间站的外部环境和SSRMS及Dextre的任务执行过程。任务设计者使用RPS将运动轨迹分解为一系列的自动序列,并验证所产生的操作序列能达到预期目标,同时又避免了奇异点、自碰撞、关节限制和结构间隙等问题。然后任务设计者将所生成的自主序列和MSS指令用包含关键字的特定句法来表达,每一句代表一项特定的MSS功能或控制要求。自主流程生成工具根据这些定制的语言来生成要求的操作流程和指令脚本。地面操作流程是MS Word格式,它将作为地面控制团队进行遥操作审查、批准和执行的主要文档。生成的指令脚本为文本文件,休斯顿任务控制中心(Motor Control Center, MCC)的指令应用程序使用该指令脚本完成操作流程中列出的各项操作。
操作流程生成后,多名飞控人员对该流程进行验证,包括使用模拟器验证和计算机复核。这个过程确保该操作流程满足完整性约束、地面遥操作约束等条件,主要包括:前后流程的连续性;机械臂机动是否超出最大行程的限制;是否正确识别和保持与空间站本体之间的间隙;MSS是否会妨碍空间站外部系统或有效载荷的操作等。与此同时,飞控人员还将记录任务机动过程持续的时间和所需的通信链路大小,执行指令脚本的验证,以确保脚本能准确地实现操作流程的要求。
特定任务软件配置文件包含了定制的接口、任务约束条件等机械臂任务执行过程中的各种优化操作。除此之外,还需要建立转移操作过程中的热平衡分析,计算轨道更换单元在最低温之前的运行时间等。
地面任务规划必须在操作计划开始之前一个星期制定并完成验证,以便使其有足够的时间和整个空间站计划相融合。最后,地面飞控团队还需开发应急程序,以便在ISS或者MSS出现异常时能使ISS返回安全构型,并恢复所有基本功能。
3.2 任务执行
MSS地面遥操作团队由3名飞行控制人员组成(简称为“ ROBO” 团队),主飞控人员位于MCC-H的主飞控大厅,另外两名辅岗人员可以在MCC-H或CSA。
地面控制人员首先需要激活MSS ,这个过程耗时90 min,紧接着是使用MSS和ISS视觉相机拍摄SSRMS和Dextre可能活动范围内的图像并下传到地面控制站,以验证规划路径段的ISS配置和RPS模型是否匹配,之后再执行具体的操作。
MSS地面控制方案是一个系统的、高度结构化的脚本指令序列,它要求2名飞行控制人员共同完成遥操作指令的执行。在执行过程中,飞控团队所有成员均对操作流程进行跟踪,以确保每一步的正确性。执行每一步时,飞控团队需要对执行的流程步骤、ISS系统当前的状态,以及命令执行过程中的通信覆盖条件进行验证和确认。指令上行前,主飞控人员需要与另一名飞控人员达成指令上行的一致命令才能向上传输,同时对指令执行情况进行监视。启动加拿大臂Ⅱ或Dextre的关节运动需上传“ Ready-Arm-Fire” 3个连续的指令[15,22]:“ Ready” 指令对应加载所需的运动学配置、“ Arm” 指令确认期望构型,“ Fire” 指令才最终启动机械臂。在“ Load” 指令之前,发指令者和确认人员都需对指令内容和正在执行的流程是否匹配进行检查。任务开始之后,ROBO团队使用下行视觉图像、遥测显示和遥测驱动RPS模型监视机械臂轨迹和与周围物体的距离。一旦观察到意外,主飞控人员会立即发送一个“ Safing” 指令来中断任务执行。
3.3 MSS在轨调试
MSS地面遥操作在轨调试过程从易到难可分为两个阶段[18]:阶段1包括简单的单关节操作、自由空间的协同操作和没有加载LEE的检查操作;阶段2包括SSRMS移动操作中多关节协同操作和接触操作。
经过ISS程序管理部门多次复核,第1阶段的调试在2005年2月23日至25日期间进行。阶段1的目标是操纵SSRMS从一个观察俄罗斯舱段的位置移动到预抓捕MBS PDGF的位置。操作过程包括单一关节和多关节联合段,初始操作是腕关节滚动操作,之后扩展到肘关节和肩关节。操作中SSRMS保持离空间站本体至少5英尺①英尺=0.3048 m。的距离。
第2阶段的调试始于2005年6月3日,目标是实现基于地面指令控制的PDGF抓取和释放操作。在阶段2执行过程中,SSRMS末端效应器和抓取装置之间的对准精度验证优先于抓取操作,在精度验证之前还需对返回于SSRMS的视觉信号的完备性和正确性进行检查。阶段2的成功表明ROBO飞行控制团队能够实现地面遥操作任务规划以及运动控制[23]。
4 对我国空间站机械臂遥操作启示
地面控制人员通过遥操作平台实现对MSS在轨任务的地面规划、运动控制,以及常规维护、故障检测和在轨诊断等功能。在其实现过程中,地空通信的大时延、有限通信带宽、通信弧段受限等问题给遥操作系统的稳定性和透明性带来了一系列影响,MSS地面遥操作控制中心采用预编程的自主控制模式和一系列操作上的约束条件来解决上述问题,成功实现了预定工程任务目标。本文在分析MSS地面遥操作的规划和实现过程中,总结出以下几点对我国未来空间站机械臂控制的启示:
1)天地协同的控制模式。空间站建设过程中对大型载荷装卸的需求较大,机械臂拖动大载荷移动过程速度较慢,通常需要占用航天员较长的时间,且空间站后期维护过程中常规例行检查任务较多,单一采用航天员在轨控制模式导致其工作时间较长、精力消耗较大,因此在机械臂控制中加入地面遥操作控制模式,可以使地面飞行控制团队执行常规例行检查任务及部分工程任务,使在轨宇航员执行更高级别的科学研究实验,以此来减轻宇航员的工作负担。我国未来机械臂控制也应该考虑这种天地协同的控制模式。
2)地面遥操作平台具有优势。空间站机械臂执行复杂任务的能力受机械臂中央处理计算机处理能力的限制,在空间站运行周期内中央计算机硬件部分不容易更新,相对而言地面遥操作平台中的硬件和软件更新比较容易,硬件更新能够提高地面控制人员任务规划和执行的能力和速度,软件更新能够为地面操作者提供强大的仿真验证工具,如虚拟相机、在线路径规划和异常情况验证等。因此我国未来遥操作平台建设过程中可以充分利用已有科技优势,提高地面处理的能力。
3)地面遥操作中心地位关键。地面遥操作中心承担着空间站机械臂任务前的设计、规划与验证,任务中的监控与执行,以及任务后的分析与评价。地面遥操作中心人员设置、岗位设置、组织协同关系和功能模块划分等对未来机械臂遥操作控制起到至关重要的作用。
4)地面遥操作仿真模型重要。在地面任务规划过程中,如何建立一种既能准确描述机械臂运行的空间环境,又能精确描述空间机器人与环境接触的动力学特性,同时又易于地面过程参数在线辨识的模型至关重要,模型的准确性直接影响后继轨迹验证的正确性,因此仿真模型的建立是未来地面任务规划系统的核心。
5)地面遥操作控制过程复杂。空间站机械臂控制复杂度高,地面遥操作控制对专业支持、天地协同提出了更高要求,天地大时延影响、有限的通信带宽、通信覆盖条件和地面控制人员临场感不足等问题导致长时间复杂控制难度更大。MSS地面控制人员为解决时延问题采用监督自主控制模式和MSS机械臂的智能程度相关,我国空间站机械臂是否能够沿用这种模式还存在较大疑问,因此在探索的过程中既要借鉴国外机械臂控制已有研究和成功应用的经验,又要结合我国现有飞控模式的要求,进一步形成我国空间站机械臂遥操作的特点和优势。
参考文献
[1]周建平. 我国空间站工程总体构想[J]. 载人航天,2013,19(2):1-5.ZHOU J P. Chinese space station project overall vision [J]. Manned Spaceflight,2013,19(2):1-5.
[2]GRAHAM G,SAVI S,BENOIT M,et al. Canada and the international space station program:overview and status [C]// Montreal,Canada:Canadian Space Agency,54th International Astronautical Congress of the International Astronautical Federation(IAF). Bremen,Germany:IAF,2003.
[3]PATTEN L,EVANS L,OSHINOWO L,et al. International space station robotics:a comparative study of ERA,JEMRMS and MSS [C]//Proceedings of the 7th ESA Workshop on Advanced Space Technologies for Robotics and Automation ‘ASTRA 2002’ESTEC.Noordwijk,The Netherlands:ESTEC,2002:1-8.
[4]CRUIJSSEN H J,ELLENBROEK M,HENDERSON M,et al. The European robotic arm:a high-performance mechanism finally on its way to Space [C]//Proceedings of the 42ndAerospace Mechanism Symposium. [S.l.]:NASA,2014:319.
[5]BOUMANS R,HEEMSKERK C. The European robotic arm for the international space station [J]. Robotics and Autonomous Systems,1998:23(1):17-27.
[6]STIEBER M E,TRUDEL C P,Hunter D C. Robotic system for the international space station [C]//Proceedings of the 1997 IEEE International Conference on Robotics and Automation Albuquerque.New Mexico:IEEE,1997:3068-3073.
[7]CRUIJSSEN H J,ELLENBROEK M,HENDERSON M,et al. The European robotic arm: a high-performance mechanism finally on its way to Space [C]//Proceedings of the 42ndAerospace Mechanism Symposium. [S.l.]:NASA,2014:319.
[8]BOUMANS R,HEEMSKERK C. The European robotic arm for the international space station [J]. Robotics and Autonomous Systems,1998:23(1):17-27.
[9]刘宏,蒋再男,刘业超. 空间机械臂技术发展综述[J]. 载人航天,2015,21(5):435-442.LIU H,JING Z N,LIU Y C. Review of space manipular technoligy [J].Manned Spaceflight,2015,21(5):435-442.
[10]秦文波,陈萌,张崇峰,等. 空间站大型机构研究综述[J].上海航天,2010,27(4):32-42.QIN W B,CHEN M,ZHANG C F,et al. Surveys on large-scale mechanism of space station [J]. Aerospace Shanghai,2010,27(4):32-42.
[11]张凯锋,周晖,温庆平,等. 空间站机械臂研究[J]. 空间科学学报,2010,30(6):612-619.ZHANG K F,ZHOU H,WEN Q P,et al. Review of the devrlopment of robotic manipulator for international space station [J]. Chin. J. Space Sci., 2010,30(6):612-619.
[12]张文辉,叶晓平,季晓明,等. 国内外空间机器人技术发展综述[J]. 飞行力学,2013,31(3):198-202.ZHANG W H,YE X P,JI X M,et al. Development summarizing of space robot technology national and outside[J]. Flight Dynamics,2013,31(3):198-202.
[13]于登云,孙京,马兴瑞. 空间机械臂技术及发展建议[J]. 航天器工程,2007,16(4):1-8.YU D Y,SUN J,MA X R. Suggestion on development of chinese space manipulator technology[J]. Spaceraft Engineering, 2007,16(4):1-8.
[14]李大明,饶伟,胡成威,等. 空间站机械臂关键技术研究[J]. 载人航天,2014,20(3):238-242.LI D M,RAO W,HU C W,et al. Key technology review of the research on the space station manipulator [J]. Manned Spaceflight,2014,20(3):238-242.
[15]AZIZ S,LAURIE M C. Concept of operation for ground control of Canada's Mobile Servicing System(MSS) [C]//The 55st International Astronautical Congress. Vancouver,Canada:[s.n.],2004.
[16]朱仁璋,王鸿芳,泉浩方,等.载人航天器操作器系统评述[J] .载人航天, 2009, 21(4) : 11-25.ZHU R Z,WANG H F,QUAN H F,et al. A Review of manipulator systems on board manned spacecraft [J]. Manned Spaceflight,2009,21(4):11-25.
[17]COLESHILL E,OSHINOWO L,REMBALA R,et al. Dextre:improving maintenance operations on the international space station [J]. Acta Astronautica,2009,64(9):869-874.
[18]TURCO S,PERRYMAN S. Ground control concept for on-orbit robotic maintenance operations on the international space station[C]//The Space OPS Conference. Montreal,Canada:AIAA,2004.
[19]AZIZ S,CHAPPELL L M. Concept of operation for ground control of Canada’s Mobile Servicing System(MSS) [C]//55thInternational Astronautical Congress. [S.l.]:IAC,2004:1-8.
[20]LANDZETTLE K,BRUNNER B,Schreiber G,et al. MSS ground control demo with MARCO [C]//Proceeding of the 6thInternational Symposium on Artificial Intelligence,Robotics and Automation in Space. [S.l.]:CSA-ASC,2001.
[21]MCGREGOR R,OSHINOWO L. Flight 6A:deployment and checkout of the Space Station Remote Manipulator System(SSRMS)[C]//Proceeding of the 6thInternational Symposium on Artificial Intelligence,Robotics and Automation in Space. [S.l.]:CSA-ASC,2001.
[22]CARON M,MILLS I. Planning and execution of tele-robotic maintenance operations on the ISS [R]. Canada:American Institute of Aeronautics and Astronautics,2012.
[23]FLORES-ABAD A,Ma O,Pham K,et al. A review of space robotics technologies for on-orbit servicing [J]. Progress in Aerospace Sciences,2014,68(6):1-26.
猜你喜欢
军事文摘(2024年6期)2024-02-29 10:00:22
科普童话·神秘大侦探(2023年1期)2023-05-30 12:48:10
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:34
军事文摘(2022年18期)2022-10-14 01:34:16
无线互联科技(2018年20期)2018-12-27 11:36:00
测控技术(2018年5期)2018-12-09 09:04:26
电子测试(2018年18期)2018-11-14 02:30:34
温州医科大学学报(2016年9期)2016-10-31 07:47:26
哈尔滨医药(2015年4期)2015-12-01 03:58:01
筑路机械与施工机械化(2015年10期)2015-11-07 17:49:05
