
基于多因子综合评估的月球探测软着陆区域及最佳巡航路线分析
2018-05-22 00:43牟乃夏李洁孟治国张灵先刘文宝
深空探测学报 2018年1期
牟乃夏,李洁,孟治国,张灵先,刘文宝
(1. 山东科技大学 测绘科学与工程学院,青岛 266590;2. 中国科学院 地理科学与资源研究所资源与环境信息系统国家重点实验室,北京 100101;3. 吉林大学 地球探测科学与技术学院,长春 130026)
0 引 言
2013年12月15日“嫦娥3号”着陆器成功着陆于月球正面虹湾地区,使中国成为世界第3个实现月球软着陆的国家[1]。软着陆探测是一种就位探测方式,可获得比星载遥感探测更精细、更深入的探测结果[1-2]。月球表面的主要地形单元有月海盆地、月陆和撞击坑[3],其中平坦的月海地形多分布于月球正面。从月球着陆的安全性考虑,首选为地势相对平坦、通讯相对容易的月球正面,但从科学研究的角度考虑,分布有丰富地形的月球背面是更合适的地域选择。如今虽然已有多颗环绕探测器对月球背面进行了遥感探测,但仍未有宇航员或探测器就位探测过这一区域[4],对于它的地势起伏、地形形成、矿物成分等仍知之甚少。例如位于南极–艾肯(South Pole-Aitken,SPA)盆地的“阿波罗”地区是研究月球背面的火山活动的代表性区域[5],在月球背面Compton-Belkovich地区,还探测到了爆裂式火山活动的高硅产物[6-7],使得月球背面成为探测月球活动的理想区域,也成为“ 嫦娥4号”探测月球的首选着陆地。因月球的自转倾角仅为1.58 °,使得理论上在月球南极会形成接近极昼或永久照亮且昼夜温差很小的地区[4,8]。该区域不仅拥有大量的平原盆地,而且也是月球背面含氧化亚铁(FeO)和二氧化钛(TiO2)的异常区域,拥有最古老的月球岩石,对研究月球地质的形成具有很重要的意义[1,9]。
当前,Suveyor、Apollo、Luna、Chang’e-3已实现多次月表着陆探测,Lunokod 1巡视器着陆于雨海的西北部地区,行驶距离达9.93 km,探测区域的绝对高差小于50 m,巡视路径的地形坡度小于10 °,针对500多个站点进行了考察探测。在整个月球探测过程中,如何对月球进行软着陆的探测,如何对探测区域和探测路径进行评估是很重要的步骤。当前针对月球探测着陆区域的研究方式呈多样化发展,如徐鹍等曾利用表面积和投影面积之比所计算的地形粗糙度来评价区域的平整情况[10],孟治国等基于南极地区的微波辐射计数据来制作南极地区微波辐射亮温图(37 GHz)用于探测分析[11],焦中虎等通过研究月球表面物质的可见–近红外光谱特征来分析月球岩石矿物组成及结构,从而辅助月球探测区域的选取[12],张健等通过分析SPA盆地形貌和构造特征、物质组成及其分布特征,以及形成机制等探测早期月球的形成演化[13]等。
但是,当前的着陆探测路线选择没有固定的方法,且考虑因素大多比较单一,缺乏一个完整的月球着陆区探测路线选择的评估体系。因此,本文以月球背面的南极–艾肯盆地内的冯·卡门撞击坑作为研究区域,综合使用多种因子的探测分析,得出月球探测器的最佳着陆区域及在安全着陆区域内的最佳探测路线。本文首次提出了多因子分析技术,为月球探测器着陆和巡航路线的规划提供了科学依据,并为后续的月球探测工作提供了科学的技术支持。
1 研究区概况
研究区域为位于月球背面南极–艾肯盆地内的冯·卡门(Von Kármán)撞击坑,研究范围为171°E~177°W,41°S~49°S。SPA盆地是太阳系中规模最大、最古老的撞击盆地,拥有原始月壳岩石,也是最可能挖出月幔物质的盆地,直径达2 000~2 600 km,盆地内部地形复杂,拥有众多大型撞击地形,且含有较高的铁(Fe)和钛(Ti)等化学元素[1,8,14],具有较高的科学研究价值。冯·卡门撞击坑位于艾肯盆地的中部,是SPA盆地中的典型地貌类型,氧化亚铁(FeO)和二氧化钛(TiO2)的含量也较高,且高程相对于盆地内的其他地区较低。该撞击坑直径约为186 km,中心坐标为(44.8°S,175.9°E),如图1所示。
源数据来自美国国家航空航天局(NASA)月球表面的原始影像数据和通过月球轨道器激光测高仪LOLA获取的DEM(Digital Elevation Model)数字高程模型数据,本文实验所用的影像数据是基于原始影像进行裁剪和拼接生成的。
2 基于多因子的评估分析
选择合理的探月登陆区域和航行器巡航路线需要综合考虑多方面的因素,在软着陆高安全性的前提下,还需要尽可能地从科学研究层面进行区域和路线设计。本文的评估内容主要分为两个部分:选取安全区域和评估最佳巡航路线。其中有关安全区域的评估因子有:撞击坑的密度、撞击坑的影响区域、整个区域的平整情况和部分区域的平整情况等,本文以地形坡度大小判断研究区域内的地形起伏情况,坡度越小地势越平缓。在已选择合适的安全区域的前提下,巡航路线选择的评估因子有:区域的垂直结构、岩石属性和元素含量因子。完整的评估流程如图2所示。

图1 冯·卡门撞击坑Fig. 1 Von Kármán crater

图2 月球探测评估流程图Fig. 2 Flow chart of the assessment of the moon
在选取安全区域的过程中,首先需要从整体的角度观察地形的走向以及起伏情况;然后基于冯·卡门地区的地形坡度图进行坡度分级,分为 < 2°、< 4°、< 6°和 > 6° 共4级不同坡度等级软着陆选择区;再针对撞击坑数据进行缓冲区分析和距离分析;最后将每个因子所得的分析结果进行综合叠加分析,最终得到合适的安全着陆区域。
首先需要在选取的安全区域中假定A、B、C为3个着陆点,并为其规划巡航路线,然后基于每条巡航路线做剖面分析,分析该航线所经区域的高程变化大小、地质岩石属性以及金属元素的含量大小,最终综合分析出最佳巡航路线。
2.1 安全着陆区域的选取
2.1.1 拟合冯·卡门区域的三维地形
冯·卡门撞击坑内的高程差达7 000多m,地势起伏较大,地形较丰富。若要对月球探测的安全区域进行评估,首先需要从整体的视角通过拟合该地区的三维模型观察研究区域的平整情况。数字高程模型是后续DEM分析的基础,也可以辅助我们更直观地掌握冯·卡门撞击坑内的起伏情况,拟合结果如图3所示。
从图3的数字高程模型中可以明显地看出,冯·卡门撞击坑的底部地势较平坦,且地势低,拥有面积较大的盆地平原,是一个很好的着陆备选区。在撞击坑的底部有一个明显的中央峰,中央峰是由撞击作用发生时反弹隆起而生成的,中央峰一般拥有下月壳的成分,对于地质研究有重要的意义。因此本文将主要针对冯·卡门底部的盆地平原执行后续的分析。

图3 冯·卡门撞击坑三维高程模型Fig. 3 Von Kármán’s three-dimensional elevation model
2.1.2 坡度分析
在着陆车的巡航区域内,若地形坡度过大,将会导致巡航车行驶艰难,故需要选择坡度较小的区域。在前苏联“月球1号”巡视器巡视月球表面的过程中,巡视路径的坡度一般低于10°[14],为提高月球车行驶的安全系数,本文对坡度安全性的划分如下

其中 < 6°的区域又划分为4° < 坡度 < 6°、2° < 坡度 <4°和坡度 < 2° 3个不同的安全等级,当坡度越小时,安全等级越高。基于DEM数据进行坡度分析,并按照上文进行坡度等级划分,结果如图4所示。冯·卡门撞击坑内的坡度小于2°的区域最大,占全区域的48.5%;边缘区域坡度起伏较大且坡度低的区域面积较小,不利于探测着陆车的巡视。相比较而言,撞击坑的底部除中心的中央峰区域外,其余部分的坡度大多小于2°,地势起伏较小,且面积较大,符合实际应用要求。

图4 冯·卡门地区坡度等级图Fig. 4 Slope grade map of Von Kármán area
2.1.3 撞击坑影响区域
从图1可以看出,在冯·卡门区域内仍有很多撞击坑存在,其中大型撞击坑主要集中在西南区域,坑底主要聚集小型撞击坑。若撞击坑过大,会导致着陆车无法正常行走,发生翻车状况,所以必须去除该部分区域。本文针对底部的盆地平原区域提取了撞击坑的矢量数据,并对其进行缓冲区分析。参考“嫦娥3号”的着陆区范围,以50 m作为缓冲半径(即允许降落误差的范围)对撞击坑进行缓冲区分析[14-16],得到撞击坑的影响区域如图5所示。

图5 撞击坑的覆盖范围Fig. 5 Coverage of the crater
参考“嫦娥3号”的着陆分析和国外其他软着陆的经验,软着陆的地点需要在远离大型撞击坑的基础上,尽量靠近小型撞击坑。为满足此需求,首先对撞击坑的数量密度进行统计,以经差和纬差各2°的标准将研究区域划分为24个区域,如图5所示,编号从左至右,从上至下分别为1~24号区域,统计结果如表1所示。

表1 每个区域撞击坑的数据统计Table 1 Data statistics for percussion pits in each area
由表1可以得出结论,坑底的北部区域撞击坑的数量较少,相对地,南部地区的16和17号区域的撞击坑数量较多且多为小型撞击坑,所以着陆区域需要尽量选择在16、17号区域内。
然后对撞击坑的缓冲区数据进行距离分析,得到以每个缓冲区为中心的栅格距离图,其中将0~1 km划分为最合适的着陆区域,之后安全等级依次按1~5、5~10、10~30、>30 km递减,结果如图6所示。安全的着陆区都集中在冯·卡门撞击坑的底部,具体分布于8~11号区域和14~17号区域,且越靠近小型撞击坑的位置安全系数越高。

图6 基于撞击坑的栅格距离图Fig. 6 Raster distance map based on crater
2.1.4 多因子分析
针对单个因子进行分析后,综合各种因素筛选出相对地势平坦、坡度平缓、小型撞击坑众多且远离大型撞击坑的区域。然后通过栅格叠加得出软着陆区域的安全等级数据(安全区域需要除去撞击坑的缓冲区域范围),并将其划分为4类,数值越大代表安全等级越高,结果如图7所示。
从图7中可以观察出,越边缘地区,着陆的安全系数越低。安全等级较高的区域大多分布在冯·卡门撞击坑的盆地平原,且多聚集在16、17号区域。
2.2 最佳巡航路线分析
在以上分析中所得的安全区域内,假定着陆点A、B、C,并分别为其规划巡航路线。然后通过对每一条巡航路线所经区域剖面分析,对比分析不同巡航路线间撞击坑垂直结构以及化学元素含量和岩石属性的不同,从而拟合最佳的巡航路线。假定的着陆点和待定的巡航路线如图8所示。

图7 安全分析结果图Fig. 7 Security analysis results
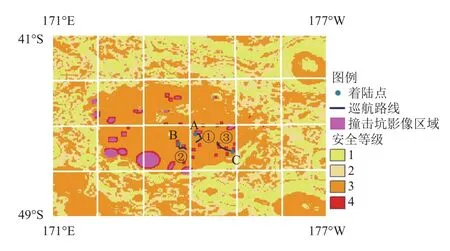
图8 着陆点和巡航路线图Fig. 8 Landing and cruise road map
2.2.1 垂直结构
基于研究区域的高程数据进行剖面分析,从而获得①②③巡航路线所经区域的垂直结构图,即每条巡航路线随着水平距离的变化而变化的高程。由图9可知,着陆点A和着陆点B所经区域的最大高程差均为45 m,着陆点C所经区域的最大高程差为70 m。明显地,巡航路线③所经区域的高程差高于另外两条路线,巡航路线①和②较利于着陆车的安全行驶。但对比巡航路线①和②的高程剖面图,巡航路线①所经区域的高程变化较缓慢,更利于着陆车的巡视。
2.2.2 化学元素含量
同样地,基于化学元素含量数据[17](图10所示)获得每条巡航路线所经区域的化学含量变化走势图,由图10可知,冯·卡门地区的化学含量异于南极–艾肯盆地的其他地区,含量较高。在冯·卡门的内部,盆地平原明显比边缘区域的含量高,尤其是在底部的西南区域。由图11可知,为着陆点B所规划的巡航路线②所经区域的元素含量最高,高达20.5,其余两条路线的元素含量相差无几,最高值均在15左右,显然巡航路线②更符合条件。

图9 巡航路线的垂直结构图Fig. 9 Vertical structure of the cruise route

图10 冯·卡门撞击坑内的化学元素含量和岩性图Fig. 10 Chemical element content and lithology Von Kármán
从科学研究价值的角度考虑,选择高程差值小,化学元素含量较高的区域最为合适。虽然巡航路线①的高程起伏更小,但巡航路线①和②高程差都为45 m(在当今技术可接受的范围内),且巡航路线②的化学元素含量明显高于路线①,因此着陆点B所在的巡航路线②最符合条件。另外,从图7看出,巡航路线③途经两种岩石区,更有利于地质科学的研究,若从地质学的角度考虑,着陆点C所在的巡航路线③最符合条件。

图11 巡航路线所经区域的化学元素剖面图Fig. 11 Section of the chemical elements in the area of the cruise route
3 结 论
本文主要研究了如何选取合适的安全着陆区域和最佳巡航路线,通过综合评估安全因子:地势整体和局部的平整性、撞击坑的密度和撞击坑的影响范围,得到安全着陆的范围。在已知安全范围的基础上,重点考虑巡航路线所经区域的地势起伏、化学元素含量和岩石属性等因素。最终结果表明,从安全性和化学元素研究的角度考虑,路线②是最好的选择,若从地质学研究的角度考虑,在70 m的高程差是可接纳范围的前提下,路线③是最好的选择。
致谢感谢美国国家航空航天局(NASA)公开的月球遥感影像共享数据和马里兰州的戈达德空间飞行中心(Goddard Space Flight Center)研制的月球轨道器激光测高仪(LOLA)所提供的月球表面的DEM数据。
参考文献
[1]李飞,张熇,吴学英,等.月球背面地形对软着陆探测的影响分析[J].深空探测学报,2017,4(2):143-149.LI F,ZHANG H,WU X Y,et al. Influence analysis of terrain of the farside of the moon on soft-landing [J]. Journal of Deep Space Exploration,2017,4(2):143-149.
[2]黄昊,张熇. 月球软着陆探测的着陆敏感器选择及相关问题分析[C]//中国宇航学会深空探测技术专业委员会第三届学术会议论文集.北京:中国宇航学会深空探测技术专业委员会, 2006:30-35.HANG H,ZHANG H.Analysis of Landing Sensor Selection and Related Problems in Moon Soft Landing[C]//Beijing:Chinese Academy of Aeronautics and Astronautics,Shenzhen Institute of Aeronautics and Astronautics,Chinese Academy of Aeronautics and Astronautics,2006:30-35.
[3]罗继强,姚连兴.月球表面着陆点选取及资源勘探的设想[J]. 红外激光工程,2006. 35(Z1):459-463.LUO J Q,YAO L X. An idea for lunar surface landing point selection and resource exploration [J]. Infrared and Laser Engineering,2006,35(Z1):459-463.
[4]吴伟仁,王琼,唐玉华,等.“嫦娥4号”月球背面软着陆任务设计[J].深空探测学报,2017,4(2):111-117.WU W R,WANG Q,TANG Y H,et al. Design of Chang’e-4 lunar farside soft-landing mission[J]. Journal of Deep Space Exploration,2017,4(2):111-117.
[5]肖龙,乔乐,肖智勇,等. 月球着陆探测值得关注的主要科学问题及着陆区选址建议[J]. 中国科学:物理学 力学 天文学,2016,46(2):9-30.XIAO L,QIAO L,XIAO Z Y,et al. Major scientific objectives and candidate landing sites suggested for future lunar explorations(in Chinese)[J]. Sci Sin-Phys Mech Astron,2016,46(2):9-30.
[6]WILSON J T,EKE VR ,MASSEY RJ. Evidence for explosive silicic volcanism on the Moon from the extended distribution of thorium near the Compton-Belkovich Volcanic Complex[J]. J Geophys Res,2015,120:92-108.
[7]JOLLIFF B L,TRAN T N ,LAWRENCE S J,Non-mare silicic volcanism on the lunar farside at Compton-Belkovich[J]. Nat Geosci,2011,4:566-571.
[8]李飞,张熇,吴学英,等.月球南极着陆区关键特性分析[J]. 航天器工程,2015,24(1):103-110.LI F,ZHANG H,WU X Y,et al. Analysis on key characteristics of lunar antarctic landing area[J]. Spacecraft Engineering,2015,24(1):103-110.
[9]于正湜,朱圣英,崔平远. 基于LIDAR的月球着陆区评估与选择方法[C]//中国宇航学会深空探测技术专业委员会第九届学术年会论文集(上册),北京:中国宇航学会深空探测技术专业委员会,2012:8.YU Z S,ZHU S Y,CUI P Y. Evaluation and selection of lunar landing area based on LIDAR[C]//China National Aeronautics and Astronautics Institute of Deep Space Exploration Technology Professional Committee of the ninth session of the annual academic conference(above),Beijing:China Aerospace Institute of deep space exploration technology professional committee,2012:8.
[10]徐鹍,周杨,李建胜,等.单张影像月球着陆区选取技术[J]. 测绘科学技术学报,2012,29(2):127-130.XU K,ZHOU Y,LI J S,et al. Single image Moon landing area selection technology[J]. Journal of Geomatics Science and Technology,2012,29(2):127-130.
[11]孟治国,陈圣波,Edward Matthew Osei Jnr,等. 基于嫦娥一号卫星微波辐射计数据的月球Cabeus撞击坑水冰含量研究[J]. 中国科学:物理学 力学 天文学,2010,40(11):1363-1369.MENG Z G,CHEN S P,Edward M O,et al. Study on ice content of Moon cabeus impact pit based on Chang’e-1 satellite microwave radiometer data[J]. Scientia Sinica(Physica,Mechanica &Astronomica),2010,40(11):1363-1369.
[12]焦中虎.可见光-近红外遥感在月表物质信息提取的应用[D]. 北京:中国地质大学,2012.JIAO Z H. Application of visible light - near infrared remote sensing in the extraction of material information on monthly[J]. Beijing:China University of Geosciences,2012.
[13]张健,缪秉魁,廖庆园,等,月球南极艾肯盆地的地质特征:探索月球深部的窗口[J]. 矿物岩石地球化学通报,2011,30(2):234-240+244.ZHANG J,MIU B K,LIAO Q Y,et al. Geological characteristics of the Moon Antarctic Aitken Basin:explore the window of the Moon deep[J]. Bulletin of Mineralogy,Petrology and Geochemistry,2011,30(2):234-240+244.
[14]乔乐,刘小倩,赵健楠,等. 月球雨海地区三个着陆点的地质特征对比研究[J]. 中国科学:物理学 力学 天文学,2016,46(2):31-45.QIAO L,LIU X Q,ZHAO J N,et al. Geological investigations of Luna 17,Apollo 15 and Chang’E-3 landing sites at Mare Imbrium of the Moon(inChinese)[J]. Sci Sin-Phys Mech Astron,2016,46(2):31-45.
[15]杨建中,满剑锋,曾福明,等. “嫦娥三号”着陆缓冲机构的研究成果及其应用[J]. 航天返回与遥感,2014,35(06):20-27.YANG J Z,ZENG F M,MAN J F,et al. The research achievements and application of Chang’e No.3 landing buffer. Spacecraft Recovery& Remote Sensing. 2014,35(6):20-27.
[16]杨建中,曾福明,满剑锋等. 嫦娥三号着陆器着陆缓冲系统设计与验证[J]. 中国科学:技术科学,2014,44(5):440-449.YANG J Z,ZENG F M,MAN J F,et al. Design and verification of the landing impact attenuation system for Chang’E-3 lander(in Chinese)[J]. Sci Sin Tech,2014,44(5):440-449.
[17]BORST A M,FOING B H,DAVIES G R. Surface mineralogy and stratigraphy of the lunar South Pole-Aitken basin determined from Clementine UV/VIS and NIR data[J]. Planetary & Space Science,2012. 68(1):76-85
猜你喜欢
数学物理学报(2022年4期)2022-08-22
英语世界(2022年5期)2022-05-18
空间科学学报(2021年2期)2021-07-21
城市道桥与防洪(2019年5期)2019-06-26
中国特种设备安全(2018年11期)2019-01-08
电气化铁道(2016年4期)2016-04-16
医学研究杂志(2015年4期)2015-06-10
航天器工程(2014年4期)2014-03-11
恋爱婚姻家庭·养生版(2011年5期)2011-09-08
知识窗(2010年2期)2010-05-14
