浅议提高水下地形测量精度的解决方案
2018-05-22 08:11聂国富
西部探矿工程 2018年5期
聂国富
(华北地质勘查局五一四地质大队,河北承德067000)
1 概述
海洋测绘作为测绘科学技术的一个重要分支,在科学研究、国民经济建设和国防建设等方面,起着重要的作用;各种现代化建设工程的全方面开展,对海洋、河流、湖泊等水域利用方式也呈现多样化,水下地形测量活动日益增多。但是,由于测量对象和工作环境的特殊性,测量精度难以把握,进而影响测量质量。
目前水下地形测量的作业模式较多采用无验潮测量技术,即GPS实时差分RTK和数字测深仪相结合。该组合系统分外业和内业后处理2部分。其中,外业包括数据采集、坐标转换、导航、设备监控,后处理包括吃水改正、姿态改正、格式转换、生成地形图等。基于系统自身原理,水下地形测量精度主要取决于水深测量精度和平面定位测量精度。本文就是通过对产生水深测量误差和平面定位误差的分析,进而提出减弱误差影响、提高测量精度的对策和方法。
2 水深测量误差来源分析
水深测量的技术多样,测深杆、测深锤、测深仪都有广泛利用。随着新技术的开发和利用,回声测量技术得到长足发展,并日益普及。这里着重讨论回声测深仪在水深测量中的误差来源分析。
2.1 回声测深的误差
根据回声测深仪的工作原理,水深是通过声波在水中的传播来实现测算的。假设声波在水中的传播速度为V,当换能器探头加载脉冲声波信号,声波发射到水底并由水底反射由探头接收,测得声波信号往返行程所经历的时间为t,则有如下公式:

式中:H′——换能器探头至水底的深度;
h——换能器探头吃水深度;
H——最终所测水深。
声速V与声波的频率、功率无关,不同的回声测深仪以不同的频率、功率发射的声波在同一水体中的传播速度相同。但在声速测定修正时由于采用不同的计算方法、不同的经验公式,计算的声速不同就会影响水深测量的结果,这就在一定程度上产生了测深误差。
另外,水深测量精度还与测深仪本身对声波及其反射时间间隔的测定、接收反射波波束角的设定有关,这些参数通常都是在仪器生产中已设定,属于系统误差,测量过程中一般很难进行调整干预,在此不予赘述。
2.2 船舶姿态变化引起的误差
由于GPS-RTK和回声测深仪的载体都是船舶,在测量过程中,浪涌引起的船舶纵倾、横摇、升沉等姿态航向变化,必然会使RTK天线中心和换能器中心的相对位置以及换能器发射声波的角度发生变化,进而影响测量精度。当海域波浪高超过0.6m,内河波浪高超过0.4m时,停止测量作业[1-2]。在符合作业条件时,我们可以通过姿态测量改正来削弱其影响。
2.3 船舶动态吃水引起的误差
当使用船舶特别是机动船测深时,船舶静止时换能器吃水深度容易测定,船舶荷载等状况未发生改变的前提下这基本上也是一个固定值,但在航行过程中,由于发动机的推力,使得船舶前进导致周围水流、水压的变化,会造成船舶(测深仪换能器)吃水的变化,此时的吃水已不仅仅是静态吃水,而是附加了一个船舶下沉量。
3 平面测量误差来源分析
GPS测量误差主要来自GPS卫星、卫星信号传播和接收机,也可分为系统误差和偶然误差。系统误差主要有星历误差、卫星钟差、接收机钟差和大气折射的误差等;偶然误差主要是多路径效应[3]。其中偶然误差无论从误差大小还是对测量精度影响结果上来说,都比系统误差大得多。在实时差分RTK测量中,除系统转换参数产生的精度影响外,测量误差来源主要有以下几个方面。
3.1 卫星状况的影响
在RTK测量中,卫星的空间分布和信号强度对测量作业影响甚大。当基准站和流动站公共卫星较少时,很难甚至不能达到RTK工作的初始化条件,RTK测量精度就无从谈起。在我国,总有一段时间存在卫星几何强度较弱的时段,此时间段内,RTK很难得到固定解;即使存在固定解,其收敛状态也满足不了高精度的要求。
3.2 电离层影响
RTK初始化的时间和可靠性,是RTK系统测量精度的保证。在正常工作条件下,RTK系统能自动模拟基准站和流动站之间对流层和电离层的差异,并能自动消除其影响。但当电离层发生剧烈变化,导致卫星信号传播至基准站和流动站各自所受电离层影响不一致,且距离越远影响就越大,此时系统已无法消除其影响,导致失锁和周跳,使初始化不能完成。
3.3 多路径效应影响
众所周知,GPS测量中受多路径效应影响较大,尤其是进行海洋测绘时,作业环境中大规模的水面成为解决多路径效应难以克服的障碍。
3.4 存在伪值问题
RTK测量作业中,有时存在着伪固定解问题。在RTK表征精度条件(固定解、收敛值、均方根等)均满足精度要求时,其测量结果却不可靠,平面误差可达数米,而这种状况通常不易被发现。
3.5 高程测量精度偏低
在GPS测量中,平面精度由于卫星空间分布具有一定的空间均匀和对称性,定位精度较为可靠。但在高程精度方面,由于GPS-RTK只能接收到地平面以上某个角度以上的卫星信号,其卫星空间组成严重不对称,以致高程测量精度不高,加之其高程基准与我国现行高程基准不一致,这就要求数据转换精度必须有保证。
4 提高水深测量精度的对策
4.1 提高声速测定的精度
由回声测深原理以及上述水深误差分析可知,影响水深测量精度的主要是声波在水中传播速度V的测定,而速度V又与水体温度T、水体含盐量S和压力P(或深度D)相关,则有经验公式(2)[4]:

实践表明,温度、压力和盐度分别在-4℃<T<30℃、1kg/cm2<P<1000kg/cm2和 0ppt<S<37ppt范围时,可获得精度优于0.3m/s的声速,比较适合我国海区。
若不考虑压力P(或深度D)的影响,则又有经验公式(3)[5]:

式中:T——水温,℃;
S——含盐度,‰;
V——声速,m/s。
综上,声波的频率、功率与测量精度无关,但不同的声速计算方法公式,在一定程度上会产生测深误差。对于单波束测深,常在作业现场利用已知水深比对来对实测声速值进行改正;当使用多波束测深时,常在现场实测声速剖面采用声线跟踪来对波束进行精确归位,有时还需进行声速后处理改正。因此,在确定测深使用声速值时,要做好深、浅水区域的水深比对,以免出现粗差。
4.2 进行姿态改正
姿态测量通常分2部分:采用姿态仪测量船体的纵摇角和横摇角;采用电罗经或GPS测定船艏向的方位角。姿态改正实际上就是坐标系统变换,通过测量的姿态角,进行坐标轴的旋转,即可对测船姿态进行改正[6]。
坐标旋转用矩阵形式表示如下:

这里a、P和R分别表示船坐标系的艏向(从正北起算)、纵摇和横摇角。下标L和B表示局部坐标系和船舶坐标系。图1所示,局部坐标系也是一个右手系,局部坐标矢量可用天线坐标和天线与换能器的坐标偏移量来计算其在地理坐标系中的三维坐标。在船坐标系中z是负号,是因为z轴是定义指向上的。
在公式(4)中,R是一个旋转矩阵运算符,它表示关于3个直角坐标分量分别做旋转:关于x轴用负的横摇角,以R1表示;关于y轴用纵摇角以R2表示;关于z轴用90°减艏向角的负值,以R3表示。总的旋转矩阵顺序由公式(5)给出:

目前,测深仪声波换能器与GPS定位仪天线安装在一起,GPS定位仪天线相位中心与换能器中心为竖直关系,也就是说,二者投影是重合的。而实际作业中也要求天线中心偏离测深换能器中心大于图上0.3mm时,进行偏心改正。所以,在保证此要求的前提下,可以不进行姿态测量改正。

图1 船舶坐标系和局部坐标系
4.3 进行换能器吃水改正
4.3.1 换能器静态吃水计算方法
当换能器安装在测量船船舷上,其静态吃水可以根据安装状况直接量测得出。
当换能器安装在测量船底部(船舶纵向中间位置)时,根据换能器相对整个船体的位置,换能器静态吃水可按几何关系测算。见图2,当船只无倾斜航行时,换能器静态吃水DT可表达为公式(6):

式中:DF——船首吃水深度;
DB——船尾吃水深度;
a——船首标记至换能器的水平距离;
b——船尾标记至换能器的水平距离;
d——换能器表面至龙骨底面的垂直距离,换能器表面在下时为正,在上时为负。

图2 换能器静态吃水
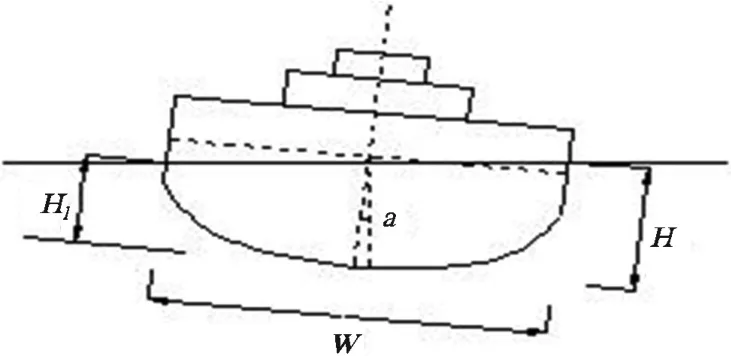
图3 船身倾斜时换能器吃水与船只吃水之间的关系
依上式,当换能器安装在船中底部时,则DT可表达为公式(7):

当测船以一定的倾斜(横摇)角航行(图3)时,换能器静态吃水DT可表示为公式(8):

Hl——船中左舷吃水;
Hr——船中右舷吃水;
W——船中吃水标记处船宽。
4.3.2 换能器动态吃水改正技术
换能器吃水的动态变化测量,实际上就是要确定在静态吃水的基础上测量作业船因航行造成的船体吃水的变化,这种变化就是船舶下沉量[7-8],又叫动吃水,它受船只负载、船型、航速、航向、海况以及水深等诸多因素的综合影响。
当船体由静止到快速运动时,由于船首因航行推水而使水面局部升高,船尾受推进器的排水作用也引发水面局部升高,从而形成船体首尾的高压区和船体两侧的低压区,造成首尾水面高、水流速度低,舷侧水面低、水流速度高。由于船型的影响,船体首尾水位上升引起的排水增加量小于船体两侧水位下降引起的排水减少量,为了适应水位分布的变化,船体将增加一个整体下沉量,且首部下沉大于尾部下沉,最终导致测深系统换能器的下沉。船体下沉量一般为数厘米到数十厘米,尤其在浅水航道中此值较高,因此在浅水航道中进行水深测量时动态吃水改正不容忽视。
(1)直接量测法。在作业船舷侧安装标尺,直接测取船舶漂浮时和保持一定速度行驶时标尺吃水读数,根据二者之差即可得出船舶下沉量。量测前,选择一块约7倍船体吃水水深的海底平坦开阔海域,以便测船可按多种速度和多种航向航行。若要在浅于7倍船体吃水的海域测量,则应增加浅水海区的比对工作。
(2)固定值法。测深时,由于GPS定位仪天线相位中心与换能器中心为竖直关系,二者投影是重合的,加之二者安装后位置相对固定;因此,换能器吃水深度和GPS定位仪天线高存在一个简单数学关系,即二者之和为换能器底部到天线相位中心的高度,且为一个固定值。作业船舶在作业过程中产生的吃水变化直接正相关同步影响到换能器吃水变化,又负相关同步影响到天线高的变化。因此,在量测定位仪天线高和换能器吃水时,要保证二者的逻辑关系,以保证测深精度。
(3)经验公式法。通常采用霍密尔公式[9],以公式(9)表示如下:

该经验公式反映了船舶下沉量(ΔD)与航速(v)、航道水深(h)、船舶吃水(D)的关系。其中K系数是由实测资料推算,按船舶长(l)与宽(b)之比值为系数可按表1查取。

表1 船舶下沉量系数K
5 提高RTK定位精度的方法
5.1 借助星历预报,选择较好时段
借助GPS星历,利用相关专业软件,对观测待观测时段卫星的图形强度做出预报,选择卫星图形强度高的时段。RTK在进行坐标解算时,所采用的卫星数越多,分布越均匀,则PDOP值越小,RTK的精确性和可靠性越高,且初始化的时间越短。因此,一般情况下,在接收卫星数保持5颗以上,且PDOP<4时,进行RTK测量精度才能有所保证[10]。
5.2 减小多路径效应影响
在海洋测量大面积水面环境中,不宜进行GPS测量作业但又不可避免;因此,我们就需要采取一定的方法来削弱其多路径效应。可以增加卫星高度角(大于10°);在基准站和船舶上安装GPS接收机,应选择在最高处,并与金属物体绝缘,避开对电磁波有强烈反射的物体;在船舶上GPS接收机天线下合适位置安装必要的反射信号屏蔽装置(如扼流圈天线等);采用相关数据处理软件、算法等。
5.3 做好数据检核
针对RTK存在的伪固定解问题,目前从其原理和现有技术来说是不易被发现和消除的,真正解决的办法就是重复观测,对原测数据进行适当检核,减少其发生的几率。当然,这种现象的产生也与卫星空间强度、多路径效应等因素有关,所以也要从这几个方面入手削减其对测量结果的影响。
5.4 提高坐标转换精度
GPS-RTK采用WGS-84椭球,测量时一般均需进行坐标转换,使其能输出测区地方坐标及测区深度基准面上的高度。坐标转换要优先选用布尔莎七参数等严密三维转换模型[11-12],使平面转换和高程转换同时进行。转换参数的求取要利用测区4个以上均匀分布的控制点,且控制点高程成果不低于四等水准精度。
5.5 采用区域似大地水准面
在水下地形测量中,水底地形点的高程主要是由RTK定位高程和测深二者解算而得,因此,RTK高程测量精度直接影响到水下地形测量的精度。我国似大地水准面精化模型(CQG2000)已于2001年完成,此模型覆盖我国全部国土,包括近海海域及专属经济区;各省也建立了地方局部高精度似大地水准面精化模型。因此,在充分进行数据检验的基础上,完全可以将其利用在RTK测量中,提高RTK高程测量的精度。
6 结语
采用GPS无验潮模式水下地形测量,通过RTK和数字测深仪相结合,无须验潮改正即可以高精度、实时、高效地测定水下地形点的三维坐标,避免了读取潮水位和验潮改正等环节的误差,既保证了测量精度也提高了作业效率。但是,在测量作业中,声速测算及采用、作业船舶姿态改正、船舶动态吃水改正等是影响测深精度的重要因素;RTK在进行水面作业时也存在卫星观测质量、多路径效应等一些影响因素。通过本文的系统分析和讨论,保证测深仪测深精度和RTK高程测量精度才是保证水下地形测量精度的根本,针对这2个方面的误差来源,只有削弱其中不利因素对测量结果的影响,才能从根本上提高水下地形测量精度。
参考文献:
[1] 中华人民共和国行业标准.JTJ 203-2001水运工程测量规范[S].
[2]虞棠胜.FJCORS与测深仪组合系统在水下地形测量中的质检探讨[J].测绘与空间地理信息,2015,38(8):221-224.
[3] 徐绍铨,张华海,杨志强,等.GPS测量原理及应用[M].武汉:武汉大学出版社,2008.
[4] 赵建虎.现代海洋测绘[M].武汉:武汉大学出版社,2007.
[5] 夏定华,李华山,马胜虎,等.丹江口水库回声仪测深精度分析[C]//测绘科技信息交流论文集,2008.
[6] 国家测绘局职业技能鉴定指导中心.注册测绘师资格考试辅导教材——测绘综合能力[M].测绘出版社,2009.
[7] 洪碧光,于洋.船舶在浅水中航行下沉量的计算方法[J].大连海事大学学报,2003,29(2):1-5.
[8] 董存义,吴东江.船体下沉量与富余水深的确定[J].航海技术,2008(3):14-16.
[9] 阳凡林,孔祥元.基于RTK配合测深仪技术测算库容精度探讨[J].测绘工程,2002,11(1):38-41.
[10]中华人民共和国测绘行业标准.CH/T 2009-2010全球定位系统实时动态测量(RTK)技术规范[S].
[11] 吴敬文,沈理,张卫英.基于GPS验潮的水下地形测量技术研究[J].人民长江,2010,41(19):45-47.
[12] 龚秋全,杜全维,董武钟,等.GPS和测深仪组合系统在电厂水下地形测量中的应用探讨[J].工程地球物理学报,2017,14(5):622-626.
猜你喜欢
河北水利(2022年10期)2022-12-29
海洋通报(2022年4期)2022-10-10
海洋信息技术与应用(2022年1期)2022-06-05
声学与电子工程(2021年3期)2021-10-13
海岸工程(2020年1期)2020-04-25
电子制作(2018年2期)2018-04-18
水下无人系统学报(2017年5期)2017-11-22
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
雷达与对抗(2015年3期)2015-12-09
浙江国土资源(2015年4期)2015-05-09