新型混合动力汽车动力经济性匹配分析
2018-05-18 07:40王晓东李飞
汽车实用技术 2018年7期
王晓东,李飞
(华晨汽车工程研究院,辽宁 沈阳 110141)
前言
在当前人们对环境保护意识的增强以及严峻的环保形势下,发展新能源汽车越来越受各国政府及车企的重视。根据某机构采集的北京市2014年冬、春、夏、秋4个季节代表月1、4、7、10月的大气细颗粒物PM2.5样品,分析研究了PM2.5质量浓度、化学特征、季节变化和污染成因。PM2.5主要来源于机动车排放、燃煤、地面扬尘和工业排放,其贡献率分别为37.6%、30.7%、16.6%和15.1%。降低汽车行驶时有害物质的排放已经是各车企不得不面对的问题。汽车行业研发排放量更低的新能源汽车已经成为主流趋势。[1]
本文以P3+P4形式混合动力SUV车型为研究对象,以纯电动和油电混合动力两种驱动方式的动力性、经济性仿真为侧重对混合动力SUV进了简要的分析。根据车辆的动力性和经济性目标要求制定了混合动力SUV的控制策略。在车辆减速或制动的过程中实现能量的回收再利用,我们采用AVL-Cruise与Simulink联合仿真的方式对混合动力SUV的控制逻辑进行分析及对比,从而确定动力性及经济性最优方案。
1 混合动力系统
1.1 P3+P4混合动力系统简介
对于P0~P4混合动力形式而言,P代表并联,数字代表不同的位置,其具体位置如图1所示:

图1 混合动力形式介绍
K0离合器的作用为在纯电动模式时将不参与驱动的发动机与动力系统断开,保证纯电动系统的高效运行,K1离合器在油电混合动力模式时起到两个动力源解耦的作用;
P0混合动力形式:电机置于变速箱之前,皮带驱动BSG电机(启动、发电一体电机)。
P1混合动力形式:ISG电机置于变速箱之前,安装在发动机曲轴上,在K0离合器之前。
P2混合动力形式:电机置于变速箱的输入端,在K0离合器之后。
P3混合动力形式:电机置于变速箱的输出端,将动力与发动机同轴输出。
P4电机置于变速箱之后,与发动机的输出轴分离,一般是驱动无动力的车轮。[2]
1.2 建立整车模型
本文着重以P3+P4形式混合动力SUV为研究对象,利用AVL Cruise软件进行整车物理模型搭建。AVL Cruise是一款用于动力经济性以及排放性能的仿真的软件,主要用于对车辆传动系统和发动机的开发。其模块化的建模理念使用户可以便捷的搭建不同布置结构的车辆模型,其复杂完善的求解器可以确保计算的速度。

图2 Cruise整车模型
在驱动形式方面本文以纯电动和油电混合动力两种驱动方式进行对比。当车辆以纯电动方式行驶时,动力经动力电池传输给前后电动机,再经过主减速器及差速器传递至车轮,从而带动车辆行驶,发动机不直接驱动车轮;当车辆以油电混合动力方式行驶时,发动机将动力传递至前轮,也可根据需求通过发电机向动力电池充电,同时动力电池以与纯电动相同的方式进行驱动。根据动力传递路线建立车辆模型,输入各结构部件所需参数,如图2所示。
2 控制策略
该混合动力汽车运行模式主要分为纯电动驱动、油电混合驱动两种模式,当汽车运行在纯电动模式时,发动机关闭,电池作为独立能量源,电池SOC值呈下降趋势;当电池SOC值低于下限SOCmin或整车需要较强动力输出时,发动机启动参与驱动车辆,同时发动机通过发电机向电池充电,电池再以与纯电相同的方式将动力传递至车轮。

图3 整车混合动力控制策略图
整车混合动力控制策略如图 3所示,基本控制思路为:首先采集SOC值、踏板信号、电机输出扭矩,当电机需求转矩 T<0时汽车处于制动状态,电动机将动力转化为电能储存到电池中;当T>0,电池SOC>SOCmin, 且电机可输出功率大于车辆需求功率,即P电>P需时,车辆处于纯电动模式,蓄电池单独为车辆提供能量;当T>0,电机输出功率不能满足车辆所需功率,即P电<P需,车辆进入油电混合动力模式,电动机发动机同时为车辆提供能量,发动机通过主减速器及差速器将动力传递至车轮,同时通过发电机向电池充电,电池再以和纯电相同的方式将动力传递至车轮,此时车辆可以获得更好的动力表现。按照上述逻辑建立Simulink仿真模型,如图4所示。[3]

图4 Simulink仿真模型
3 整车性能分析
3.1 动力性分析
车辆动力性体现了一辆车动力总成系统匹配程度的好坏,也考验了工程师的设计水平。我们从原地起步加速时间、最大加速度以及最高车速三项指标来分析车辆的动力性。根据国标要求,动力性测试要在整车半载质量下进行。对软件中Full Load Acceleration 任务进行设置,明确计算任务并输入参数,计算后可得到整车加速曲线及参数。[4]
3.1.1 原地起步加速时间分析
原地起步加速模拟车辆从静止加速到一定速度的时间,反映整车的动力水平,为汽车设计中常见的动力性评价指标。我们分别计算纯电动模式和油电混合动力模式下的加速性能。
纯电动模式中,设置SOC值为90%,计算结果如图5:
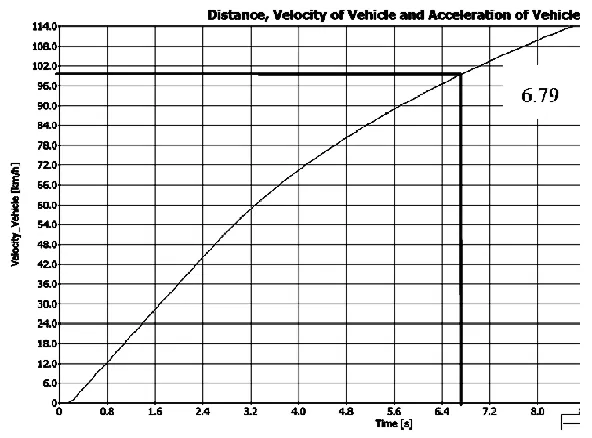
图5 纯电动模式0-100km/h加速时间
由图5可知纯电动模式0-100km/h原地起步加速时间为6.79S。
混合动力汽车最强加速模式为电动机和发动机同时向车辆提供动力,且SOC值较高。在软件中设置SOC值为90%,发动机为启动状态,计算结果如图6:

图6 混合动力模式0-100km/h加速时间
如图6所示油电混合动力模式0-100km/h原地起步加速时间为5.5S。油电混合动力模式在0-100km/h加速时间方面较纯电动模式有明显提高。
3.1.2 最大加速度
最大加速度性能也是评价车辆加速能力的一项指标,较大的加速度会给人较强的加速感受,对软件中 Full Load Acceleration 任务进行设置,计算结果如图7、图8:

图7 纯电动模式最大加速度
如图7,纯电动模式最大加速度为5.6m^2/s。

图8 混合动力模式最大加速度
如图8,油电混合动力模式最大加速度为6.6m^2/s。
可知车辆在油电混合动力模式下,会给人体更强烈的主观加速感受。也从侧面证明0-100km/h加速时间对比结论的正确性。
3.1.3 最高车速分析
由于世界各国对最高车速的限制不同,车辆行驶在高速公路上时,在不违反交通规则的情况下,较高的最高车速可以使汽车更快的到达目的地,减少乘客路途上的时间。分别计算纯电动模式和油电混合动力模式下的最高车速性能,计算结果如图9、图10:

图9 纯电动模式最高车速
如图9,纯电动模式最高车速为131km/h。

图10 混合动力模式最高车速
如图10,油电混合动力模式最高车速为171km/h。
通过以上动力性指标对比可知,油电混合模式在整车动力性方面较纯电动模式有明显优势。
3.2 经济性分析
对于混合动力车型来说,其工况包含油电混合式驱动,纯电动式驱动,需分别结算其能量消耗情况。我们采用NEDC工况对其进行测试。根据目前我国对于新能源汽车法规GB/T 19753-2013 轻型混合动力电动汽车能量消耗量计算方法中要求,混合动力汽车能量消耗计算方法分为条件A、条件B进行。条件A为在车辆SOC最高值作为初始点,行驶完一个NEDC循环后消耗的电量。在纯电动模式下车辆以50±2km/h的速度行驶,至发动机自行启动时的SOC值作为条件 B的初始点,计算混合动力模式下的电量和燃油消耗量。[5]
3.2.1 续驶里程分析

图11 纯电动模式续航里程
如图 11,根据软件计算结果,车辆以 SOC最高值90%作为起点,行驶至电池放电过程终止(SOC值为30%),共行驶了5个完整的NEDC循环及额外4.128km,总共58.718km。
3.2.2 燃油消耗分析

式中:
C——燃料消耗量,单位为升每百千米(L/100km)。
c1——条件A试验中所得燃油消耗量,单位为升每百千米(L/100km)。
c2——条件 B试验中所得燃油消耗量,单位为升每百千米(L/100km)。
De——按照附录B规定的试验规程,所测得的纯电动续驶里程,单位为千米(km)。
Dav——25km(假设的储能装置两次充电之间的平均行驶里程)。
分别计算式(1)中各参数。其中,条件 A中燃油消耗量c1为0 L/100km,条件B中燃油消耗量c2为7.12 L/100km,所测的纯电动续航里程De为58.718km,根据公式求得综合燃油消耗量C为2.13 L/100km。
4 总结
本文对新能源汽车在纯电动及油电混合动力模式下的动力经济性进行计算及对比,在油电混合动力模下车辆可以获得更强的动力性,同时在经济性方面较传统汽油车也有明显优势。在如今国家和民众对于环境保护的意识越来越强,传统制造业已经来到了必须进行技术革新的新阶段。
汽车行业中,世界范围各大主流汽车厂商已经宣布在2025年停止传统燃油车的生产及销售,汽车行业电气化已经是必然趋势,抓紧提升新能源汽车研发能力是新一代工程师面临的紧迫任务。作为最大的发展中国家,同时也是新能源消费大国,我国发展新能源汽车行业已经势在必行。
参考文献
[1] 韩力慧.北京市大气细颗粒物污染与来源解析研究.[J]中国环境科学.2016.36 (11):3203-3210 .
[2] 杜莎.深耕混合动力技术[C].汽车与配件.2017(26):58-60.
[3] 张杰.混合动力城市客车多能源控制策略研究[D].合肥工业大学.2010.
[4] 黄华,邱森,李献菁,黄锦成.车用替代能源动力性、排放性研究[J].装备制造技术,2006(04):29-31.
[5] GB/T 19753-2013,轻型混合动力电动汽车能量消耗量计算方法[S].
猜你喜欢
西部交通科技(2022年2期)2022-04-27
汽车实用技术(2022年4期)2022-03-07
财经(2020年21期)2020-11-12
专用汽车(2020年6期)2020-06-28
新能源汽车报(2019年25期)2019-08-13
新能源汽车报(2018年9期)2018-05-14
上海师范大学学报·自然科学版(2018年3期)2018-05-14
航空模型(2016年10期)2017-05-09
科技创新与应用(2016年36期)2017-02-21
中国新技术新产品(2017年2期)2017-01-20