
基于数字虚拟飞行的民机侧风着陆地面航向操稳特性评估
2018-05-15 13:40刘海良王立新
北京航空航天大学学报 2018年3期
刘海良, 王立新
(北京航空航天大学 航空科学与工程学院, 北京 100083)
侧风着陆是一种对飞机操稳特性与驾驶员操纵技术要求高、需要经常完成且飞行事故相对高发的飞行任务。在侧风着陆最终进近的末段,驾驶员需要在保证飞机空速、高度下降率等纵向关键飞行参数平稳变化的同时,通过方向舵、副翼等横侧操纵来克服侧风引起的机体顺风漂移、顺风滚转及迎风转向等不利影响,尽可能地减小着陆接地相对跑道中心线的航迹偏差,并保持机翼不出现严重的倾斜[1-2]。不恰当的操纵或超出限制大小的侧风可能导致飞机出现翼尖擦地、地面打转,甚至从侧向冲出跑道等严重的安全事故。
飞机在着陆过程中抗御侧风的能力与其地面航向操稳特性密切相关。飞机重量与重心位置、气动特性、起落架布置、发动机安装位置等设计因素决定了其抵抗侧风的能力。根据运输类飞机适航标准CCAR-25-R4[3]的规定,民用飞机需在规定大小的侧风条件下,演示验证飞机的地面航向稳定性与操纵性是否满足相关的要求;飞机侧风着陆的操作程序以及允许的着陆最大侧风分量(通常按道面情况不同)则需要在飞行手册或机组人员培训手册中明确给出。因此,有必要在民机的概念、方案设计阶段较准确地评估其着陆抗御侧风的能力,以支撑飞机总体方案特别是起落架布置方案的设计,为飞机后续顺利通过地面航向操稳特性等条款的适航符合性验证奠定基础。
目前,中国在概念设计和方案设计阶段主要依靠经验公式校核飞机的抗侧风能力[4],后期采用原型机地面滑行和飞行试验的方法验证地面航向操稳特性的适航符合性[5-6]。工程计算公式以静力平衡为基础,未能充分考虑飞机对侧风响应以及驾驶员操纵本身所具有的动态特性,同时忽略了起落架动力学中的非线性因素,因而计算精度较低;而原型机飞行试验只能在设计完成后进行,此时设计方案修改的自由度大大减小,若需要修改设计将付出巨大的时间代价和经济成本。国外,基于飞机地面运动仿真的方法已广泛地应用于飞机的地面航向操稳特性的评估与起落架的优化设计中[7-9]。Burdun和Mavris等[10-11]采用数字虚拟飞行的方法在飞机概念和方案设计阶段评估了飞机的操纵特性和运营安全性。采用这种数值计算方法可不需要硬件支持和真实驾驶员参与,具有更好的经济性和快速性,设计人员可方便有效地评估设计方案。
本文建立了一种基于数字虚拟飞行的侧风着陆地面航向操稳特性的评估方法。首先,依据相关的适航条款,设计了数字化的侧风着陆任务,并提出了量化的评估准则;其次,建立了飞机地面运动模型以及侧风着陆任务的驾驶员操纵模型;最后,进行人机闭环数学仿真,分析关键参数时间历程曲线,评估侧风着陆任务的操稳特性是否满足适航要求。此外,基于上述评估方法探究了侧风分量大小、道面污染情况等使用条件对飞机侧风着陆地面航向操稳特性及安全性的影响。
1 侧风着陆的操稳特性与适航要求
民用飞机地面航向操稳特性以及与之相关的风速规定在运输类飞机适航标准CCAR-25-R4的第25.235和25.237条给出[3]。根据要求:对于陆上飞机,应确定在干跑道上对起飞和着陆是安全的90°侧风分量的大小,该分量必须至少为20kts(1 kts≈0.515 1 m/s)或0.2VSR0(取大者,但不必超过25 kts,其中VSR0为与着陆构型相对应的失速参考速度);在直到上述限制的侧风分量大小下,飞机在地面运行可预期的任何速度,不得有不可控制的地面打转(ground-looping)倾向。
地面打转是飞机在地面运行过程中的一种转向失控状态,严重的地面打转可能最终导致飞机翼尖擦地、起落架损坏或从侧向冲出跑道。从设计的因素来看,飞机是否容易发生地面打转现象与其地面滑行的航向稳定性密切相关。现代大型民用飞机多采用前三点式起落架,其主起落架位于全机重心的后方且承受了大部分垂直载荷,速度矢量偏离机体纵向对称面后所引起的侧向摩擦力矩总起到回复力矩的作用,并起到抑制飞机偏航运动、稳定滑行航向的作用,因而大大减小了飞机发生地面打转的可能性。尽管如此,前重心装载、剧烈的刹车等使前起落架承载加重的工况所产生的“独轮车效应”,会降低飞机地面滑行的航向稳定性。
在飞机侧风着陆过程中,侧风分量则是诱发地面打转现象的重要外因。图1为飞机在地面滑跑时,侧风引起的机体横侧向受力示意图。侧风分量对飞机运动的影响包括侧向漂移、顺风滚转和迎风偏航(即风标稳定性)3个方面。在着陆接地前,驾驶员通过操纵使机翼倾斜或利用机体偏流角抵消侧风的上述影响以保持飞机的进近航向;接地后,则依靠机轮轮胎提供的侧向摩擦力抵抗侧风引起的漂移,同时需要顺风偏转方向舵以克服迎风转向趋势和迎风偏转副翼以保持机翼水平。侧向摩擦力f与侧力C形成的力偶矩会进一步增加飞机顺风滚转的倾向。飞机在着陆接地过程中,空速减小,副翼与方向舵的操纵效能降低,若不足以克服侧风的不利影响,接地后的滑跑过程中就可能发生地面打转现象。此外,驾驶员应对侧风的不当操纵也增大了地面打转现象发生的可能性。
一般地,飞机的重量越小,起降速度越低,其抗御侧风分量的能力越差,因而侧风着陆安全性的验证任务应在小重量、前重心、着陆构型、干跑道条件下进行[12]。
在侧风着陆过程中,飞机质心与跑道中心线之间侧向航迹偏差d以及机体倾斜姿态角φ在一定程度上反映了地面打转倾向的严重程度。随着侧风分量的增大,为克服地面打转倾向、保持滑行航向对横航向操纵效能的要求增加。因此,对于侧风着陆任务,安全性评估的判定准则应当包含以下2个方面的内容:
1) 机体姿态几何限制。在飞机地面运行阶段,起落架外的其他机体部件与地面之间应保持足够的安全间距,这需要限制飞机的俯仰和倾斜姿态角。对于本文研究的某大型水陆两栖飞机,为确保涡轮螺旋桨发动机的桨尖及机翼翼尖与地面之间的安全距离,要求飞机在地面滑行段的倾斜姿态角不大于5°。
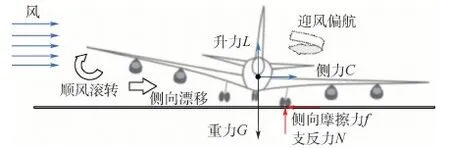
图1 侧风着陆横侧向受力分析
2) 跑道限制。着陆滑跑过程中,机体质心相对跑道中心线的侧向航迹偏差最大允许值与机场等级相关。关于飞机地面直线滑行的要求,适航标准CCAR-25-R4[3]第25.149条(地面最小操纵速度)指出,飞机质心相对跑道中心线的侧向航迹偏差d不应超过9 m,这一数值可作为侧风着陆滑跑所允许最大侧向航迹偏差的参考。对于本文研究的某大型水陆两栖飞机,其准降跑道等级为4D,对应的跑道半宽度为22.5 m,允许的滑跑最大航迹取9 m。
2 数字虚拟飞行的运动建模
2.1 飞机地面运动模型
飞机的地面运动模型分为机体运动模型、机轮运动模型以及起落架的缓冲支柱模型3个主要部分。其中,缓冲支柱为连接机体和机轮的弹性装置,位于缓冲器之上的机体视为弹性支承质量(sprung mass),位于缓冲器之下的其余部分(机轮、轮架和刹车装置等)视为非弹性支承质量(un-sprung mass)[13]。以下简要给出各部分的数学模型,详细的推导过程、参考系的定义及参考系之间的坐标转换矩阵请阅读文献[14-16]。
1) 机体六自由度运动模型
在地面参考系(视为惯性系)内,考虑起落架作用力的刚性机体质心平移动力学方程为
(1)
式中:mb为弹性支撑的机体质量;g为重力加速度常数,取9.81 m/s2;[xyz]T为机体质心位移;[XYZ]T为气动力与发动机推力的合力在体轴系上的分量;[FxkFykZzk]T为第k个起落架作用于机体的力在体轴系内的分量(k=1,2,3分别表示前起落架和左、右主起落架);LIB为体轴系到惯性系的坐标转换矩阵。
在机体参考系内,考虑起落架作用力和力矩的刚性机体转动动力学方程及姿态运动学方程为
(2)
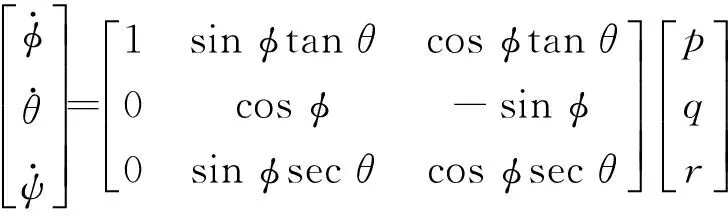
(3)
式中:[pqr]T为机体转动角速度在体轴系内的分量;[φθψ]T为机体的欧拉角;Ixx、Iyy、Izz和Izx分别为转动惯量和惯性积;[LxMyNz]T为气动力和发动机推力的合力矩在体轴系上的分量;[MxkMykMzk]T为起落架作用于机体的力矩在体轴系上的分量;[xbkybkzbk]T为起落架在机身上安装点在体轴系下的坐标。
2) 机轮运动模型
单个起落架的双机轮折算为单个机轮,其轴线参考点具有3个平动自由度,机轮沿轮轴具有1个转动自由度。机轮轴线参考点的平动方程及机轮绕轮轴转动方程分别表示为
(4)
(5)

3) 起落架缓冲支柱模型
起落架支柱等效为可变长度的悬臂梁,即沿缓冲器轴向具有1个平动自由度,同时可沿航向和侧向发生弯曲变形,但不考虑支柱扭转变形。
由几何关系确定的支柱末端变形量为
(6)
(7)
式中:[xskyskzsk]T为缓冲支柱末端相对于安装点的位移在体轴系内的分量;lk为支柱在缓冲器未压缩时的长度;LSBk为体轴系到第k个起落架缓冲支柱参考系的坐标转换矩阵。
依据变形量及求导得出的变形速率可确定支柱在上下端的受力为
(8)
(9)

依据力矩平衡关系,可求出起落架在安装点作用于机体的力矩分量为
(10)
式中:Mgzk为轮胎回正力矩。
在上述模型中,方程式(1)~式(5)为微分方程,联立后构成描述飞机地面运动的封闭方程组,方程式(8)~式(10)为代数方程,用于求解微分方程中出现的起落架作用力。各个子模型(机体、起落架缓冲支柱和机轮)之间详细输入输出关系参阅文献[19]。
2.2 气动力模型
飞机的气动力和气动力矩的计算公式为
(11)
式中:D、L和C分别为在风轴系上定义的气动阻力、升力和侧力;CD、CL和CC分别为相应的气动阻力系数、升力系数和侧力系数;Laero、Maero和Naero分别为在体轴系上定义的气动滚转力矩、俯仰力矩和偏航力矩;Cl、Cm和Cn分别为相应的气动滚转力矩系数、俯仰力矩系数和偏航力矩系数;ρ为大气密度;S为机翼参考面积;b为气动展长;c为平均气动弦长;VT为真空速(TAS)。
本文研究对象为某大型水陆两栖飞机的气动模型,其构成为
(12)
气动系数由基本项、操纵面增量、起落架修正项、地面效应修正项和动导数项组成。其中,气动系数基本项、起落架修正项和地面效应修正项均是作为迎角α、侧滑角β和发动机拉力系数CT的函数;操纵面偏转引起的纵向气动系数增量作为襟翼偏度δf和升降舵偏度δe的函数,引起横航向气动系数增量作为襟翼偏度δf、副翼偏度δa和方向舵偏度δr的函数。特别地,气动力地面效应的强弱与飞机离地高度H相关,当离地高度大于半翼展时,认为地面效应对气动力的影响减弱为零。上述气动系数来自飞机的风洞试验测量数据,数据迎角有效范围为-12°~18°,侧滑角有效范围为-30°~30°。
2.3 侧风着陆操纵指令与驾驶员操纵模型
民用飞机侧风着陆的一般操作程序及对应的仿真参考指令输入如下:

对应的仿真参考指令输入为
(13)
式中:h(t,γapp)表示随时间t变化的、由进近下滑轨迹角γapp解算的参考高度。
2) 在距离地面50 ft(1 ft=0.304 8 m)开始拉平(flare)操纵,即拉杆以增加机体的俯仰姿态,同时缓慢地收油门到慢车状态δp,idle。若稳定进近时机体存在偏流角,需在改平后操纵方向舵减小或消除偏流角(de-crab),同时操纵副翼抵消侧风引起的漂移。若侧风分量较大,接地时允许存在剩余的偏流角以确保机翼不至过度倾斜。
对应的仿真参考指令输入为
(14)
式中:Δθ为在拉平过程中所需增加的俯仰姿态角变化量,根据经验可取3.5°~5.0°。
3) 飞机建立起着陆姿态,空速逐渐减小使飞机飘落接地。主轮接地后逐渐松除拉杆力,平稳地将前轮落至跑道上。依据跑道长度和道面情况选择自动刹车挡位或柔和地进行人工刹车。当存在强侧风时,适当地迎风偏转副翼以保持机翼水平。在后续的着陆滑跑阶段,驾驶员通过脚蹬控制方向舵和前轮偏转,以使飞机沿跑道中心线滑行,直至滑行速度减小至零。
对应的仿真参考指令输入为
(15)
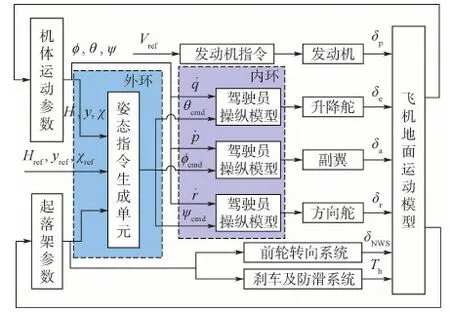
图2 侧风着陆任务仿真计算结构框图
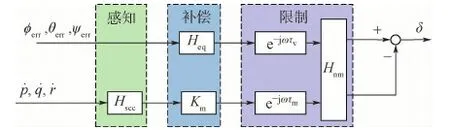
图3 驾驶员操纵模型结构
图3中,Hscc为人体内耳前庭器官系统用于感知角运动变化的半规管模型,其数学描述为[20]
(16)
Km为运动感知通道补偿增益;Heq为视觉补偿项,其数学描述为[21]
(17)
式中:TL为驾驶员对操纵过程的预测而需要的超前补偿时间常数,约为0~1.0 s,该值反映了驾驶员精神负荷的大小;TD为中枢信息的传递和加工过程的时滞,约为0~1.0 s,该值反映了驾驶员体力负荷的大小;Kv为驾驶员操纵增益,取值范围为1~100[23]。
驾驶员操纵模型中的“限制”项e-jωτv和e-jωτm表示驾驶员对信息反应的神经传导时延,τv和τm的取值范围约为0.06~0.20 s。Hnm表示人体的肌肉作动延迟,其数学描述为特征频率ωnm=9.0 rad/s、阻尼比ζnm=0.7的二阶环节:
(18)
在本文的仿真中,俯仰、滚转、偏航三轴操纵通道驾驶员操纵模型参数的具体取值如表1所示。
本节所述的基于数字虚拟飞行建模和评估方法已应用于中国某支线客机十余个适航审定科目的试飞模拟,仿真计算与飞行试验结果符合较好[24],满足工程设计的精度要求。

表1 驾驶员操纵模型参数取值
3 评估算例及分析
3.1 侧风着陆安全性评估
以某大型水陆两栖飞机作为算例,对侧风着陆过程进行人机闭环数学仿真。飞机初始飞行状态为:高度100 m,空速55.95 m/s,在20 kts左侧风中以着陆构型稳定进近,偏流角为5.0°,用于配平侧风分量的机体倾斜姿态角为4.28°(左倾斜)。道面情况为混凝土干跑道。
飞机侧风着陆进近与接地后的部分飞行状态参数和起落架状态参数的时间历程曲线如图4所示,图中:C.G.为飞机质心;NG为前轮;LMG为左侧主轮;RMG为右侧主轮。
经过改平操纵后,飞机建立接地姿态,接地瞬间机体俯仰角θ=6.13°,倾斜角φ=-4.21°,偏航角(此处亦即偏流角)ψ=-5.10°。接地前机体左倾斜使迎风侧主轮(LMG)先接地,随后被风侧主轮(RMG)接地。主轮接地后出现一次轻微回弹后进入两轮滑跑,再经历2.1 s后前轮接地,飞机转入三点姿态滑跑。因接地过程倾斜角和偏流角减小,顺风飘移使得飞机接地时的质心偏向被风侧(t=8.12 s,y=0.08 m);飞机接地后未完全消除的偏流角是滑跑起始段形成质心右偏差(t=8.69~11.17 s,y<0 m)的主要原因。随后的滑跑过程中,机体顺风倾斜(φ>0)程度增加,迎风侧起落架的缓冲支柱压缩行程S明显小于被风侧,作用于被风侧主轮的刹车力矩Tb也大于迎风侧,双侧主轮不对称的纵向摩擦力形成右偏航力矩,使滑跑航迹偏向顺风侧(t>11.17 s,y>0 m)。滑跑末段,滑行速度降低使不对称气动作用减弱,加之前轮与方向舵的协同纠偏操纵,机体倾斜角和偏航角均逐渐减小至零,质心侧向偏差逐渐减小。
算例飞机在20 kts侧风分量条件下着陆时,地面滑跑过程中机体的最大倾斜角φmax=3.44°(右倾斜),不超过5°;最大侧向航迹偏差dmax=2.51 m,小于9 m。据此可初步判定算例飞机的地面航向操稳特性满足适航要求。
3.2 侧风分量大小的影响
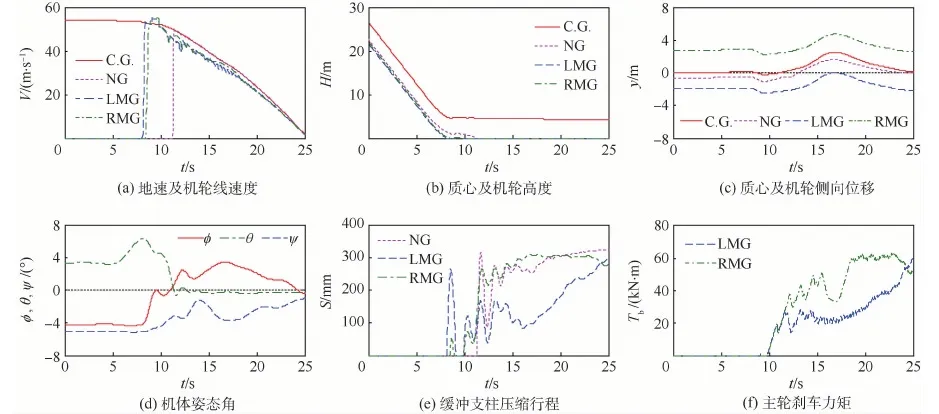
图4 侧风着陆滑跑机体与起落架运动状态参数及操纵输出的时间历程
随着侧风分量增大,飞机侧风着陆驾驶员操纵难度增大,飞行安全性降低。在民机飞行手册中,需要明确给出随道面情况变化的、允许飞机安全着陆的最大侧风分量的大小。图5给出了算例飞机分别在20、25和30 kts侧风分量中着陆的仿真结果。图中:“×”为接地点。
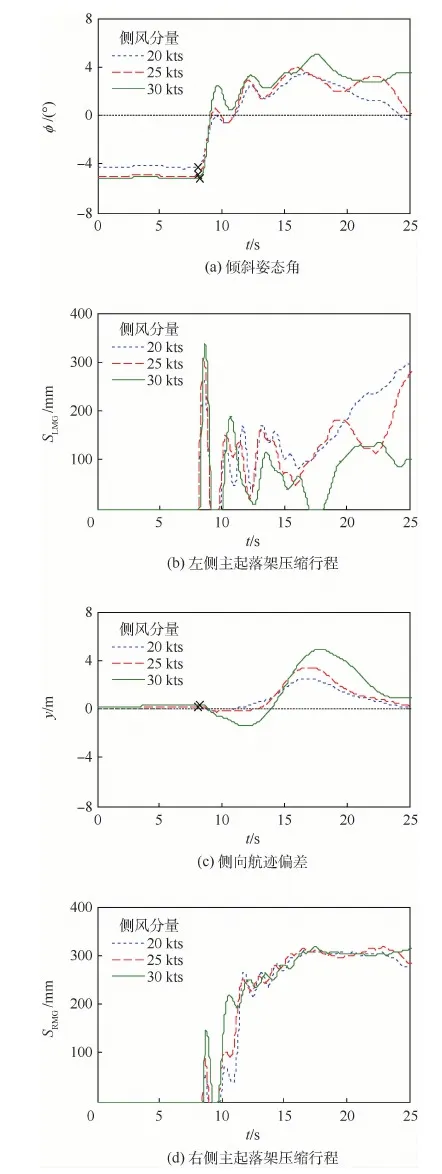
图5 侧风分量大小对侧风着陆安全性的影响
由图5可知,当侧风风速分量由20 kts增加到25 kts时,气动不对称导致的飞机滑跑航向运动不对称性增大,使位于迎风侧的主起落架承载减小;着陆滑跑过程中的最大倾斜角由3.44°增加到4.01°,最大侧向航迹偏差由2.51 m增加到3.49 m。特别地,当风速分量增加到30 kts时,地面滑跑的最大倾斜角为5.11°,不满足近地面机体几何姿态角限制。对比图5(b)和图5(d),双侧承载严重不对称,如图5(b)绿色实线所示,迎风侧主起落架在触地初始瞬间(8.9 s时刻)的压缩行程峰值为350 mm,十分接近行程结构限制355 mm;而滑行过程机体顺风倾斜使其在16~18s之间出现短暂的压缩量为零的离地现象,此时机体表现出强烈的侧翻倾向。从图5(c)轨迹侧向偏差曲线可观察到较明显的地面打转现象:滑跑初始段(8.9~14.2 s)飞机质心轨迹在跑道中心线右侧,迎风打转的趋势使其转入跑道中心线左侧,在驾驶员纠偏操纵下逐渐向跑道中心线靠近。
3.3 道面污染情况的影响
道面条件是指道面的铺设材质以及受污染程度等,其中道面污染形式包括潮湿、积水、覆雪和覆冰等。道面条件会显著地影响轮胎与跑道之间的地面结合力系数,因而是影响飞机起降安全性的重要因素,尤其对于侧风着陆任务。图6对比了算例飞机在干道面、湿道面以及覆冰道面上侧风着陆的仿真结果。仿真中,侧风分量为20 kts,左侧风;在40 mph(1 mph=0.447 2 m/s)前行速度下,干道面的最大地面结合力系数μ取0.60,湿道面取0.45,覆冰道面取0.18[17]。
由图6(a)和图6(b)测算可知,当地面最大结合力系数由0.60减小至0.18时,滑行速度减为零的耗时由17.1 s增加为23.2 s,滑行距离由560.4 m增加到799.8 m,即随着道面最大结合力系数的减小,刹车效率降低使得飞机滑行减速至停止所需的时间和跑道长度增加,增大出现直接冲出跑道危险的可能性。
此外,在侧风分量为20 kts的情况下,当道面最大结合力系数由0.60减小至0.18时,地面滑行的最大侧向航迹偏差由2.51 m增加到3.92 m,但反映飞机滑行地面打转倾向的最大机体倾斜角变化不显著。此外,由图6(e)可见,在湿滑跑道滑行的偏航角速度峰值较大,易诱发驾驶员的误操纵,使飞机从侧向冲出跑道。
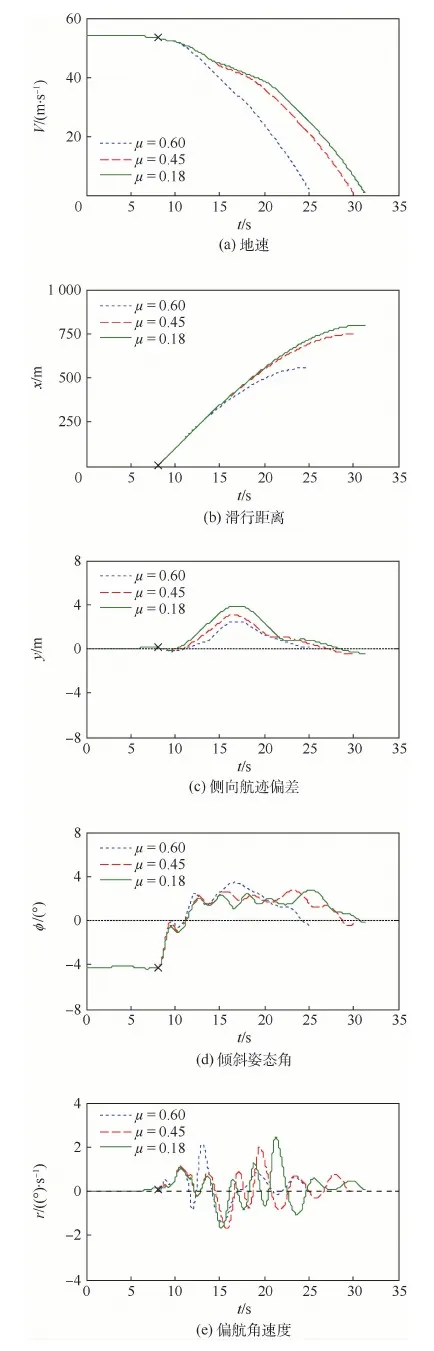
图6 道面污染情况对侧风着陆安全性的影响
4 结 论
1) 基于适航要求,建议将倾斜角不超过5°且航迹侧向偏差不超过9 m作为侧风着陆地面滑行安全性的定量判定准则;建立飞机地面运动模型和驾驶员操纵模型,完成人机闭环数学仿真,最终形成一种基于数字虚拟飞行仿真计算的侧风着陆地面航向操稳特性评估方法。
2) 算例飞机在20 kts侧风分量条件下着陆时,机体最大倾斜角为3.44°,最大侧向航迹偏差为2.51 m,可初步判定其地面航向操稳特性能满足适航要求。
3) 增大侧风分量会同时增加滑跑过程中的最大机体倾斜角和侧向航迹偏差;当侧风分量增加到30 kts,着陆滑跑过程机体的最大倾斜角超过5°,出现明显的地面打转倾向,不满足飞行安全的要求。
4) 道面污染降低地面结合力系数,一方面,会增加滑跑减速消耗的时间和跑道长度,对于算例飞机,当地面最大结合力系数由0.60减小至0.18时,减速滑跑耗时由17.1 s增加为23.2 s,滑行距离由560.4 m增加到799.8 m,;另一方面,增大侧风着陆时的侧向航迹偏差和偏航角速度峰值,最大侧向偏差由2.51 m增加到3.92 m,容易诱发驾驶员的误操纵,使飞机从侧向冲出跑道。
参考文献(References)
[1] U.S.Department of Transportation,Faderal Aviation Admini-stration.Airplane flying handbook:FAA-H-8083-3A[M].Oklahoma City:FAA,2004:8-33.
[2] 蒋康博,蒙泽海,叶忱.自然风对飞机着陆的影响[J].飞行力学,2014,32(3):197-199.
JIANG K B,MENG Z H,YE C.The effect of natural wind on aircraft landing[J].Flight Dynamics,2014,32(3):197-199(in Chinese).
[3] 中国民用航空局.中国民用航空规章 第25部 运输类飞机适航标准:CCAR-25-R4[S].北京:中国民用航空局,2011.
Civil Aviation Administration of China.China civil aviation re-gulations Part 25:Airworthiness standards of transport category aircraft:CCAR-25-R4[S].Beijing:Civil Aviation Administration of China,2011(in Chinese).
[4] 程不时.飞机设计手册 第5册:民用飞机总体设计[M].北京:航空工业出版社,2005.
CHENG B S.Aircraft design handbook 5th book:Preliminary design of civil airplane[M].Beijing:Aviation Industry Press,2005(in Chinese).
[5] 郑作棣.运输类飞机适航标准技术咨询手册[M].北京:航空工业出版社,1995.
ZHENG Z D.Technical advisory for airworthiness standards of transport category aircraft[M].Beijing:Aviation Industry Press,1995(in Chinese).
[6] 修忠信,由立岩.运输类飞机合格审定飞行试验指南[M].上海:上海交通大学出版社,2013.
XIU Z X,YOU L Y.Flight test guide for certification of transport category airplanes[M].Shanghai:Shanghai Jiaotong University Press,2013(in Chinese).
[7] BALTES E,SPITZ W.Virtual flight test as advanced step in aircraft development:AIAA-2002-5823[R].Reston:AIAA,2002.
[8] GEORGE R,DOYLE J.A review of computer simulations for aircraft-surface dynamics[J].Journal of Aircraft,1986,23(4):257-265.
[9] COETZEE E B.Modelling and nonlinear analysis of aircraft ground manoeuvres[D].Bristol:University of Bristol,2006.
[10] SCHARL J,MAVRIS D N,BURDUN I Y.Use of flight simulation in early design:Formulation and application of the virtual testing and evaluation methodology:AIAA-2000-5590[R].Reston:AIAA,2000.
[11] BURDUN I Y,DELAURENTIS D A,MAVRIS D N.Modeling and simulation of airworthiness requirements for an HSCT prototype in early design:AIAA-1998-4936[R].Reston:AIAA,1998.
[12] U.S.Department of Transportation,Faderal Aviation Admini-stration.Flight test guide for certification of transport category airplanes:AC No.25-7C[S].Oklahoma City:FAA,2012.
[13] KRÜGER W,BESSELINK I,COWLING D,et al.Aircraft landing gear dynamics:Simulation and control[J].Vehicle System Dynamics,1997,28(2-3):119-158.
[14] ETKIN B.Dynamics of flight:Stability and control[M].New York:John Wiley and Sons,1995.
[15] PI W S,YAMANE J R,SMITH M J C.Generic aircraft ground operation simulation:AIAA-1986-0989[R].Reston:AIAA,1986.
[16] KHAPANE P D.Simulation of asymmetric landing and typical ground maneuvers for large transport aircraft[J].Aerospace Science and Technology,2003,7(8):611-619.
[17] SMILEY R F,HORNE W B.Mechanical properties of pneuma-tic tires with special reference to modern aircraft tires:NASA TR-64[R].Washington,D.C.:NASA,1960.
[18] WOODA G,BLUNDELL M,SHARMA S.A low parameter tyre model for aircraft ground dynamic simulation[J].Materials and Design,2012,35:820-832.
[19] 刘海良,王立新.基于数字虚拟飞行的民用飞机纵向地面操稳特性评估[J].航空学报,2015,36(5):1432-1441.
LIU H L,WANG L X.Assessment of longitudinal ground stabi-lity and control for civil transport aircraft based on virtual flight testing methodology[J].Acta Aeronautica et Astronautica Sinica,2015,36(5):1432-1441(in Chinese).
[20] HOSMAN R,VAN DER GEEST P,VAN DER ZEE J.Development of a pilot model for the manual balked landing maneuver:AIAA-2009-5818[R].Reston:AIAA,2009.
[21] POOL D M,ZAAL P M T,DAMVELD H J,et al.Pilot equation in manual control of aircraft dynamics[C]∥Proceedings of the 2009 IEEE International Conference on Systems,Man,and Cybernetics.Piscataway,NJ:IEEE Press,2009:2480-2485.
[22] ROBINSON J,BARNES S,WEBB M,et al.The use of pilot modeling in aviation reguatory affairs:AIAA-2009-5825[R].Reston:AIAA,2009.
[23] 高金源,李陆豫,冯亚昌,等.飞机飞行品质[M].北京:国防工业出版社,2003.
GAO J Y,LI L Y,FENG Y C,et al.Aircraft handling qualities[M].Beijing:National Defense Industry Press,2003(in Chinese).
[24] 涂章杰,王立新,陈俊平.基于数字虚拟飞行的民机复飞爬升梯度评估[J].北京航空航天学学报,2017,43(12):2530-2538.
TU Z J,WANG L X,CHEN J P.Assessment of airworthiness compliance of go-around climb gradient for civil aircraft based on digital virtual flight testing method[J].Journal of Beijing University of Aeronautics and Astronautics,2017,43(12):2530-2538(in Chinese).
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
军民两用技术与产品(2022年2期)2022-06-01
科技与创新(2021年24期)2022-01-03
北京航空航天大学学报(2021年4期)2021-11-24
中原商报·科教研究(2021年6期)2021-05-13
百科探秘·航空航天(2020年8期)2020-07-29
百科探秘·航空航天(2020年6期)2020-07-09
民用飞机设计与研究(2020年1期)2020-05-21
学校教育研究(2020年3期)2020-02-18
